
无人机低空摄影测量系统在水利工程测量中的应用
2012-12-11 06:08:38王春生杨鲁强魏传喜任江龙
测绘通报 2012年1期
王春生,杨鲁强,王 杨,魏传喜,任江龙
(中水北方勘测设计研究有限责任公司,天津300222)
一、概 述
无人机低空摄影测量系统包括飞行平台、飞行导航与控制系统(简称飞控系统)、地面监控系统、数码摄像设备、数据传输系统、发射与回收系统、地面保障设备。
该系统可广泛应用于土地利用动态监测、矿产资源勘探、地质环境与灾害勘查、海洋资源与环境监测、林业草场监测等领域,也可在水利工程测量中应用。本文以在水利工程测量中采用无人机低空摄影测量系统为例,介绍其实施方案并分享成功经验。
作业设计需根据地面分辨率、航摄范围的要求、航摄时间、航线布设、影像重叠度、分区等作业情况及要求进行设计。
二、作业方案
笔者所在单位在某水利工程测绘任务中采用了无人机低空摄影测量系统共实施了7个架次的飞行工作,飞行设计航线见图1。该工程的平面控制布设了四等GPS网,共埋设24个GPS标石点,联测3个国家三角点;高程控制采用四、五等几何水准测量成果;像控点采用区域网布设方案,航向相邻像控点的跨度8~12条基线,像控点一般布设在航向及旁向六片或五片重叠范围内;采用GPS-RTK方式联测像控点三维坐标。测量时置信度设置在99.9%,在固定解状态HRMS≤0.02 m且VRMS≤0.02 m时进行数据采集,最终采用两次测量值均值作为像控点最终成果。航空摄影采用无人机,实施了7个架次的航摄,航摄仪采用Canon 5DMarkII,地面分辨率为17 cm;航测内业空三加密采用Inpho,采用VirtuoZo NT 3.5采集地形地物要素,结合航外调绘资料采用南方CASS9.1地形地籍成图软件编辑成图,输出最终成果。具体工作流程见图2。
图1 工作流程图
三、实施概述
以笔者所在单位在某水利工程测量中运用的无人机航摄系统为例,简要介绍无人机航摄系统在工程测量中的配置、航飞成果及空中三角测量等情况。
1.低空摄影测量
工程实施过程中采用的航摄仪是Canon EOS 5D MarkⅡ,共进行了7个架次的航摄,累计航线数36条、相片张数3383张,航飞成果统计见表1。
表1 各摄区航飞成果统计
像片倾斜角小于4.5°,旋偏角小于15°,航线弯曲度小于3%。实际航线偏离设计航线不大于像片上1 cm。同航线高差小于30 m,实际与设计航向小于30 m。像片位移误差小于30m。
由上可知无人机航摄成果飞行质量和摄影质量等各项指标均合格。
2.空中三角测量
利用像控片(JPG格式)、点之记说明(JPG格式)、像控点成果(XLS格式)、带展点号及范围线的结合图(DWG)等资料,在VirtuoZo数字摄影测量工作站采用Inpho软件进行空中三角测量加密。由于工期紧迫为了紧赶进度,在加密时进行了分区加密,各个区域独立成图以提高作业效率。其中,第1~第5架次单独组成区域网进行加密解算,测区名称分别为 Sub01 、Sub002 、Sub003、Sub004B、Sub005B;第6架次分了3个区域,第1和第2区域分别组成区域网进行加密解算,测区名称为Sub06_1、Sub06_2;第3个区域与第7架次组成区域网进行加密解算,测区名称为Sub07_0603。
(1)加密流程
空三加密的流程如图3所示。
(2)加密点量测和解算
空三加密点采用计算机自动匹配。内业加密点尽量布满像片全部范围,6°重叠的航带连接点每张像片不少于3个。按3×3标准位置选点,每个区域标准点数量不少于3个,并尽可能地将模型连接差和航带连接差降到最低,加强图形构网强度的检查,在少点位置予以补点。因为航片航摄比例尺平均为1∶23 000的航片,所以对于加密使用的人工点的切准精度,均经过第二人的切准核实,以提高切准的可靠性。
图3 空三加密的流程图
(3)平差解算
运用Inpho自带平差软件解算,进行区域网平差。通过剔除粗差、迭代计算、人工编辑尽可能地提高精度。
(4)质量控制
空三加密主要检查的内容:航片畸变改正、信息文件设置、相机文件设置、像点匹配、航带连接、外业像控点的转刺以及平差处理等。
(5)质量检查
1)模型连接精度统计见表2。项目空中三角测量报告统计出模型连接的平面位置较差最大值是0.313m,最小值是 0.066 m;高程较差最大值是0.162m,最小值是0.035 m,说明模型连接的精度较高,满足规范要求。
表2 模型连接较差统计表m
2)本项目空三加密精度统计(1/5000成图)见表3。
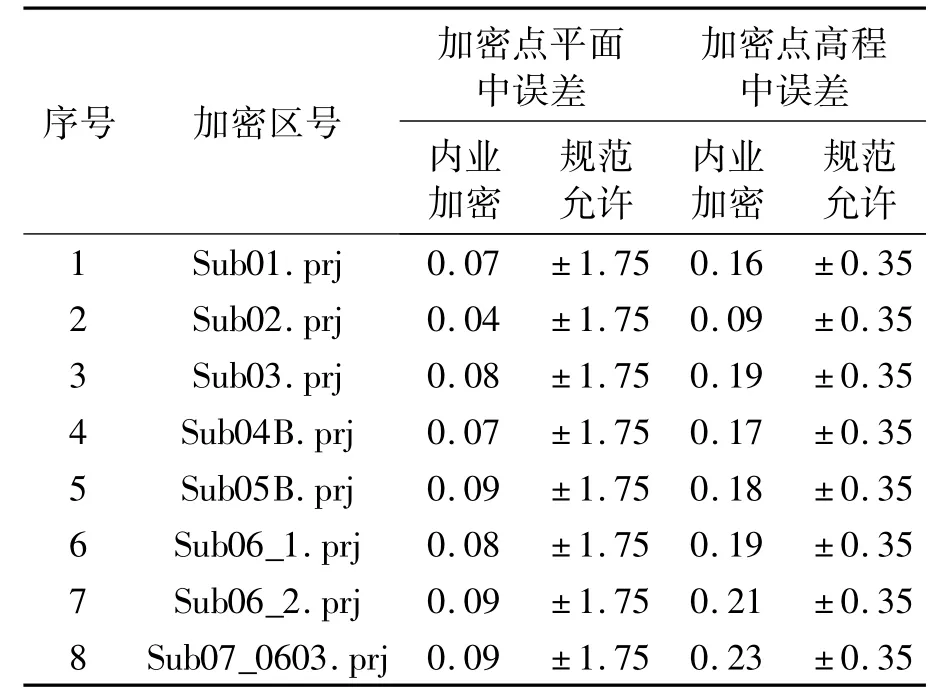
表3 空三加密精度统计(1/5000成图)表 m
经统计空三加密测量成果符合规范要求。表3说明成图精度可靠,完全满足工程需要,符合规范要求。立体模型检测图幅等高线高程中误差统计见表4。通过上述各项统计说明,无人机低空摄影测量系统在该水利工程测量中的应用是成功的。
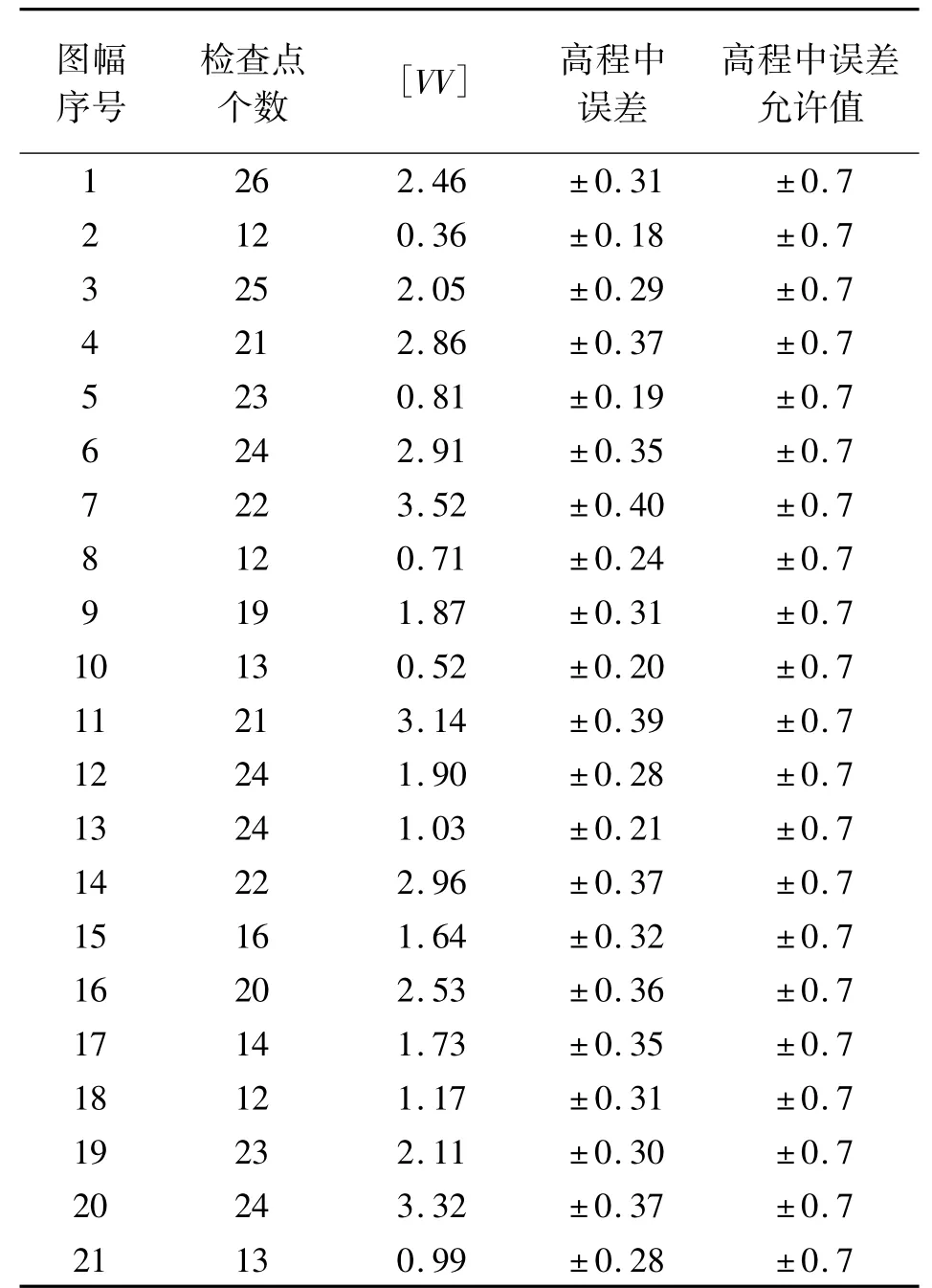
表4 立体模型检测图幅等高线高程中误差统计表m
四、结束语
无人机低空摄影测量系统应用广泛且灵活、投入成本较小经济效益可观;该技术对于1∶5000、1∶10 000地形图测量的精度完全能够满足,在作业中因像控点布设的不同、模型分区的不同等因素将会产生不同的结果,作业中需注意接边误差,尽量采用Inpho软件自动处理,配合人工匹配、人工检查使空三成果更加可靠。
(略)
猜你喜欢
写真地理(2020年39期)2020-12-23 02:01:59
理论与创新(2020年15期)2020-10-09 11:07:45
辽宁省博物馆馆刊(2020年0期)2020-08-13 09:15:58
太原科技大学学报(2019年3期)2019-08-05 01:18:18
企业科技与发展(2018年5期)2018-09-10 00:20:39
北京航空航天大学学报(2017年9期)2017-12-18 07:12:31
南方文学(2016年3期)2016-06-12 13:54:34
中国房地产业(2016年8期)2016-03-01 01:26:16
信息安全研究(2016年10期)2016-02-28 20:18:19
兵器知识(2016年2期)2016-01-29 16:45:07
