
手持式激光扫描仪瞬时位置姿态的一种反求方法
2012-12-11 06:08:20郑卫峰
测绘通报 2012年1期
贺 磊,郑卫峰,王 力
(1.信息工程大学地理空间信息学院,河南郑州450052;2.65015部队,辽宁 大连116000)
一、引 言
激光扫描仪可以快速获取被测物体表面的点云数据,但由于光线的直线传播特性,在每个视角下扫描仪只能测量物体某一局部的表面数据。为了获取物体整个表面的三维数据,需要从不同视角对物体进行多次测量。每个不同视角下的测量都是在扫描仪当前坐标系下进行的,所以需要确定一个坐标转换参数,能够将各个视角得到的点集合并到一个统一的坐标系统下,得到被测物体完整的表面三维数据模型。统一坐标系的过程叫做数据配准[1],该技术在逆向工程、曲面质量检测和虚拟现实等领域均有着广泛的应用。
数据配准方法的不同决定了扫描模式的差异,依据灵活性分类,可以把扫描模式分为静态扫描和动态扫描。大多数地面扫描仪采用静态扫描方式,将扫描仪固定在支架上,在每个视角进行扫描时,扫描仪保持静止,测量完成后利用公共点或ICP算法[2]将单站数据统一转换到一个特定坐标系下,如Leica HDS6000、Trimble GS200 等。车载、机载、星载扫描仪则必须使用如卫星定位、惯导等外部测量手段解决动态扫描过程中的自动配准问题[3],但这些外部测量设备往往相当复杂。本文提出了一种基于目标点的自动配准算法,在无须复杂外部测量手段的情况下实现动态扫描,从而能够实现方便灵活的手持式激光扫描。
二、扫描仪原型设计
激光扫描仪设计的核心在于如何实现测距,手持式扫描仪由于体积限制,无法采用有源测距技术,因而大多采用结构光测量技术实现。本文采用基于双目视觉的点位测量技术和相位移动原理的结构光投影扫描来设计扫描仪。扫描仪原型样机如图1所示。
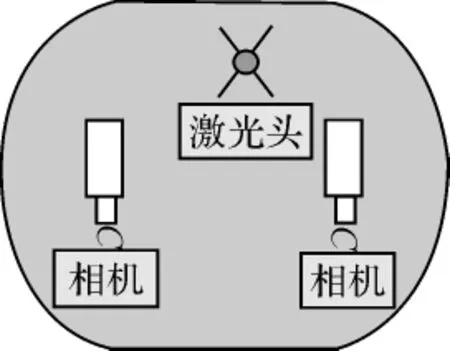
图1 扫描仪原型
激光头发射光线照射在被测物体上形成物点P,两台相机同时对P点进行测量,在位于点OL处的摄像机成像平面上成像为PL,在位于点OR处的摄像机成像平面上成像为PR。双目视觉基本原理为共线条件方程,如果已知两相机的参数,则可以通过量测PL的像素坐标计算出空间直线OLPL,物点P必然在直线OLPL上。同理,通过量测PL的像素坐标可计算出空间直线ORPR,物点P也必然在直线ORPR上。计算空间同名光线OLPL和ORPR的交点,即可求得物点P的三维坐标[4](如图2所示)。
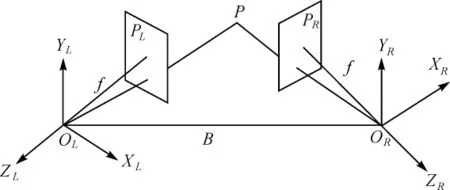
图2 双目视觉原理图
三、编码标志和随机编码
激光扫描仪要实现对目标全方位的测量,必须从不同位置对同一物体进行多次测量,需要采用特定的方法来进行多站数据的拼接,使用编码标志是比较高效的方式。编码标志是一种自身带有数字编码信息的人工标志[5]。测量时,手持激光扫描仪上的两个相机同时对编码标志进行拍摄,通过图像处理等方法进行编码标志的自动识别;然后依据编码标志的三维坐标,利用后方交会的原理解算处相机的位置和姿态[6],从而依据仪器内部参数可以实时确定激光扫描仪的位置和姿态。编码标志的种类很多,主要包括点分布型编码标志、同心圆环型编码标志,如图3所示。
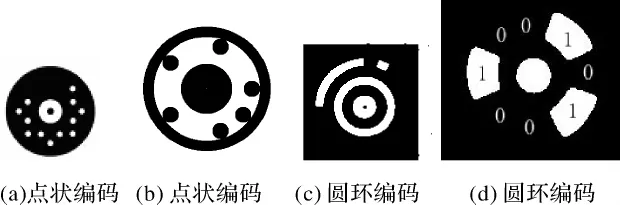
图3 编码标志
编码标志虽然能解决多站拼接的问题,但具体使用时也存在一定的问题:① 设计复杂,容易误匹配;②面积较大,对目标遮挡较多。随机编码较好地解决了这两个问题,目前在结构光扫描系统中得到了广泛应用。随机编码采用点状标志实现,将一定数量的点状标志黏贴在测量目标附近,则每次测量能够测到其中一部分点位,由于随机因素,不可能有任何两组点具有相同的空间拓扑关系,因此就可以利用这种独特性来进行点位的识别(如图4(b)所示),所有的白色圆点和黑色圆点都是点状标志在相机中的像。
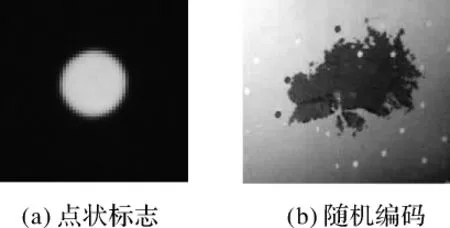
图4 随机编码
手持激光扫描仪进行测量的任何一个瞬间,两个相机首先对点状标志进行测量,获取所有测量到的点状标志在瞬时测量坐标系中的三维坐标;然后去已知点坐标库中去搜索能够匹配的点位(黑色圆点),利用匹配点进行相机位置和姿态的后方交会解算;紧接着将已知点库中没有的点(白色圆点)的三维坐标转换成物方坐标系并存入已知点库中为后续测量服务,完成所有的坐标系转换后才开始对激光线进行测量,获取被测对象表面点的点云数据(图4中阴影区域)。当扫描仪位置和姿态发生变化时则重复上述过程,直到完成整个目标外形的测量。
四、随机编码识别算法
随机编码的识别,实际上是要在每次测量时,从测量标志点中找出已知点集中已有的对应点。从数学原理上分析,可以使用任何欧式变换不变量进行判定,如距离、角度、面积、体积等[7];从算法复杂程度上来说,使用距离判别最为简单方便。
设测量点集为P,包含n1个点,坐标系为瞬时测量坐标系;设已知点集为Q,包含n2个点,坐标系为物方坐标系。在随机编码识别时要自动计算出P中的哪些点在Q中已经存在;然后依据对应点求取P和Q的坐标转换参数,利用坐标转换参数可以完成测站拼接;最后把P中所有点转换到物方坐标系下,并存入Q中作为新的已知点库。
使用距离进行拼接的具体步骤为:
(1)计算距离模板库
计算点集Q中任意两个端点间的距离,A到B的距离和B到A的距离是一样的,所以只保留一个,距离的计算次数为。模板库每一个成员由一个距离及两个端点构成,记为。计算点集Q中所有的距离,形成距离模板库。
(2)寻找对应
对于P中任意一点p1,计算P中另外一点p2到p1的距离s12。在距离模板库中寻找距离等于s12的Distant成员,如果不存在,再选下一点重复计算。对于计算的结果可以得出以下的结论:如果P中所有点与p1间的距离都未能找到对应的Distant成员,则表明p1在Q中不存在对应点,因此不能用作公共点;仅存在一个对应的Distant成员,则表明P,Q两个点集中有且仅有两对公共点,其对应关系无法确定;如果找到两个对应的成员,此时可停止对p1的操作,Q中两个Distant成员的公共端点即为P中p1点的对应点,如图5所示。其中,实心点为公共点,空心点不是公共点,由得出p1与q1对应,构成一对公共点。

图5 距离法识别对应点
五、坐标系参数求解
对于每一对公共点,都具有两套坐标:① 瞬时测量坐标系下的坐标;②物方坐标系下的坐标。在测量过程中进行两个坐标系之间的转换是进行后方交会解算的关键算法之一。任意两个空间直角坐标系都可以通过平移、旋转、缩放进行转换。设某一坐标系 Oxyz先平移(X0,Y0,Z0),再旋转(εx,εy,εz),最后缩放k倍后,转换到另一坐标系O'x'y'z'。点 P在 Oxyz中的坐标为(X,Y,Z),在 O'x'y'z'中的坐标为(X',Y',Z'),则可得

式中,M为旋转矩阵,

则构造如下函数

因此对第i个公共点,可列出如下拟合方程

式(6)写成矩阵形式为

六、应用实例
天津航道公司组织国内数家测量单位对某大型铸件进行三维外形扫描,复杂外形条件使大型扫描仪遇到很多麻烦。而手持式小型扫描仪虽然还存在测量速度慢的问题,但利用随机编码算法,在密集扫描后较好完成了测量任务。
图5为铸件实物照片,因为目标体积较大,使用地面型三维扫描仪因测站视角限制,出现大量无法测量的死角,而且对内径测量基本无法进行。为此,在目标表面粘贴了数百个圆形回光标志,使用手持式小型激光扫描仪分5次进行了扫描。扫描中利用随机编码算法解决仪器位置和姿态问题,很好地将所有扫描数据统一到物方坐标系,扫描后的原始点云数据如图6所示。为彻底解决测量死角问题,将测量点云按设计轴线进行了对称叠加,然后构建三角网,将点云数据转换成实体模型(如图7所示)。最后对实体进行补洞、平滑、抽线,形成能够在UG、ProE等软件中直接调用的三维模型(如图8所示)。
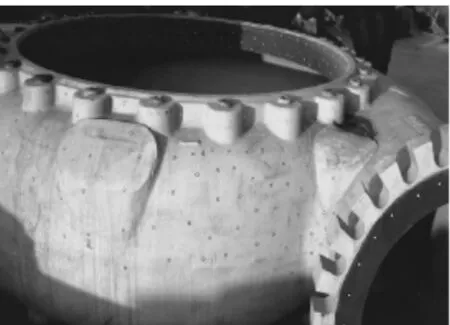
图5 铸件实物
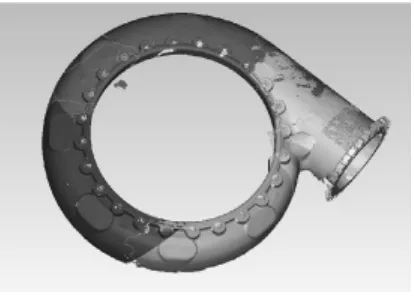
图6 扫描原始数据
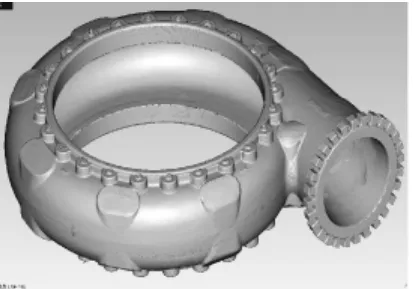
图7 镜像对称

图8 最终成型
七、结束语
基于随机编码的自动定向算法较好地解决了激光扫描仪多站拼接的问题。借助圆形标志提供的公共点和坐标系转换算法,可以将所有的点云测量数据统一到物方坐标系,从而获得物体外形的完整三维数据。在足够的时间保证下,这种方式将可以测量从小到大很多物体的外形,甚至汽车、飞机、舰船等。
在无法布设人工标志的情况下,也可以利用图像特征来作为特征点进行自动定向,但此时的多站拼接精度将受到图像处理精度的影响,肯定低于使用人工标志的精度。
[1]贺磊,余春平,李广云.激光扫描数据多站配准方法研究[J].测绘科学与技术学报,2008(6):410-413.
[2]JOST T,HUGLIH.A Multi-resolution Scheme ICPAlgorithm Fast Shape Registration[C]∥ Proceeding of the First International Symposium on 3D Data Proceeding.Visualization and Transmission.Padova:[s.n.],2002:540-543.
[3]WEHR A,LOHL U.Airborne Laser Scanning—An Introduction and Overview[J].Photogrammetry and Remote Sensing,1999,54(2-3):68-82.
[4]马颂德,张正友.计算机视觉——计算理论与算法基础[M].北京:科学出版社,1998.
[5]AHN SJ,RAUHW,KIM S I.Circular Coded Target for Automation of Optical3D-Measurement and Camera Calibration[J].International Journal of Pattern Recognition and Artificial Intelligence,2001,15(6):905-919.
[6]范生宏.工业数字摄影测量中人工标志的研究与应用[D].郑州:信息工程大学,2006.
[7]王力.基于人工标志的激光扫描数据自动拼接技术研究[D].郑州:信息工程大学,2010.
猜你喜欢
体育教学(2022年4期)2022-05-05 21:26:58
启蒙(3-7岁)(2019年5期)2019-06-27 07:24:50
漫画月刊·哈版(2019年4期)2019-04-18 16:22:32
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
中等数学(2017年2期)2017-06-01 12:21:50
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
中国卫生(2015年10期)2015-11-10 03:14:20
现代营销·经营版(2015年3期)2015-04-20 06:46:58
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28 12:21:31
