
利用三维激光扫描仪为古文物建立信息库
2012-12-11 06:08:38齐文娟
测绘通报 2012年1期
齐文娟
(青岛市勘察测绘研究院,山东青岛266032)
一、引 言
柄灵寺最早叫“唐述窟”,在羌语中有“鬼窟”之意。炳灵寺创建于西秦,历经北魏、西魏、北周、隋、唐、元、明、清各代扩建,距今已有1600多年历史。现存窟龛183个,造像近800身,分石胎泥塑和泥塑3种,壁画约900 m2。其中169窟开凿于一天然石洞中,规模最大。浮雕石塔25座。炳灵寺石窟雕像776躯,其中石像694躯,泥塑82躯,主要人物有释迦牟尼、观世音菩萨、无量寿佛、弥勒佛以及其他各种菩萨、佛等(如图1所示)。
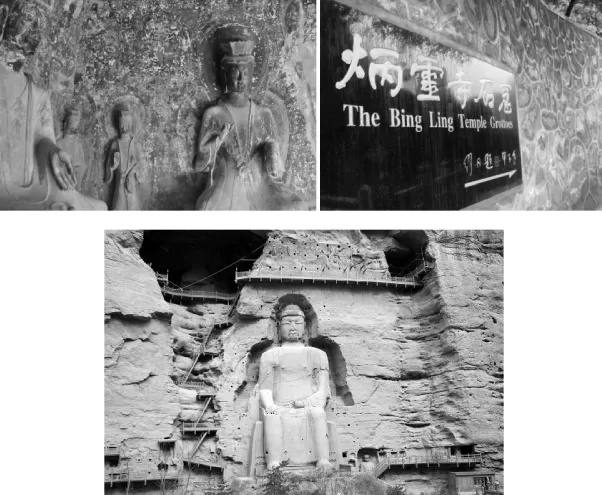
图1 柄灵寺
二、建立古文物信息数据库的意义
我国是一个古建筑保存较多的文物大国,不同时期的古建筑有其不同的风格、特点。要长期有效地保护这些古建筑,必须对其进行精确的测绘,以获取较完整的数据,为古建筑的保护和修复提供基础数据;同时还要对重要的古建筑进行变形、损毁监测,对已修复的古建筑进行后期评价[1]。传统的测绘方法采用单点测量设备。这种测量方法比较适合规则简单的古建筑和现代建筑。对于结构复杂且不规则的古建筑,少量的离散的特征难以表现古建多样的建筑风格、建筑特点。目前,随着电子计算机的广泛应用,古建筑的测绘也进入了数字化时代,三维激光扫描技术在古建筑修复测绘中的运用越来越广。
三、工作流程
1.工作原理
应用三维激光技术,可对古建筑的结构、尺寸以及连续的表面信息进行完整地测量[2]。三维扫描仪利用内置扫描头,不断发射激光脉冲。将光速与每次激光发射和接收的时间差相乘除以二可得扫描仪与每个点目标间的距离,然后可通过公式计算点目标的三维坐标。同时,内置的步进马达驱动扫描发射装置在竖直面内以固定角度和速度进行摆动,根据使用者设定的扫描点间隔,扫描仪可以在每完成一次摆动和一列点云数据的扫描后,再向顺时针方向转动一个微小角度,继续下一次摆动,完成下一列点云数据的扫描。如此往复,直至完成测量范围内所有景物的扫描为止。
2.工作流程
对炳灵寺露天崖壁及壁画的建库工作共分为两个部分:①外岩点云数据采集。炳灵寺的露天崖壁上遍布了古代工匠雕刻的各色雕刻、泥塑形象;在岩壁的下方,更有工匠们雕琢的上百个包含壁画及泥塑佛像的石洞。本文在距离外岩150 m远的位置架设扫描仪,对整个岩壁进行扫描。②进入洞窟内,对壁画和雕塑进行精细的扫描。
(1)洞外岩壁扫描
1)数据采集。炳灵寺位于山水间,为了更完整地采集岩壁数据,选择了在岩壁对岸的小山上对其进行扫描。扫描间隔为5mm,此密度属于超高精细度测量。扫描完成后,得到了连续的影像及点云数据。
由于采集得到影像数据是连续的且在一定的重叠度的条件下拍摄的,每张相片的拍摄瞬间的拍摄中心的方位和方向参数已知,因此可以将这些影像在软件中连接在一起,以一张完整的影像显示出来。影像的显示效果如图2所示。另外,作为本文的数据采集主体,点云数据中每个点的坐标位置也被清晰地记录了下来。整体的点云显示效果如图3所示。

图2 影像拼合效果
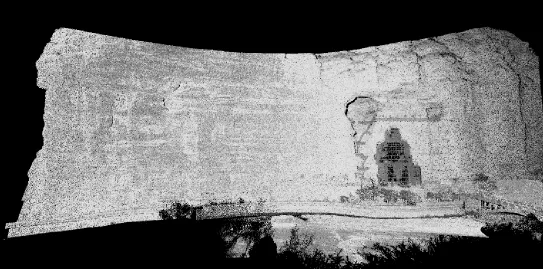
图3 岩壁整体点云
2)点云编辑与拼接。完成外业的岩壁点云数据和影像数据采集后,可以在室内对数据进行处理,便于后期使用。点云数据的编辑主要包括点云数据中测区以外数据点的去除及点云赋色两部分工作。作为文物保存的一项重要工作,文物色彩及目标点位置信息不能表达的细微纹理都需要以颜色信息来表达。扫描仪具有照相机与扫描仪同轴的特点,因此可以直接给目标点赋予真实色彩。此外,作为精确记录文物原貌的初始数据,还要将不需要的、非文物上的目标点删除,仅保留有用数据(如图4所示)。
3)通过点云数据制作各种类型的成果。
立面图的绘制:传统的文物保护工作中,一般采用将测量点相连接的方式来形成结构图。图中难免缺少对建筑物细部结构的表达。另外,还可采用近景摄影测量法,通过图像定向生成立体图像模型,绘制立面图。但此法一般周期较长,需要经过图像相对定向、绝对定向等步骤后,将符合精度标准的立体像对在立体成像仪上成图,制作比较复杂。使用者还需要配置相应的手轮脚盘及专业三维显示器才能进行数据采集。采用三维激光扫描仪点云数据制作立面图,则可以省去这些步骤,直接在普通台式机或笔记本上描点成图。下面对绘图过程进行描述。
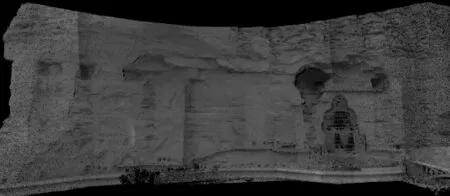
图4 经过编辑和赋色后的点云数据
制作步骤为:①在绘图软件中,导入点云数据(如图5所示);② 在不同的图层上,根据点云的三维位置信息对明显的特征结构进行勾绘,直至完成整个立面的特征提取(如图6所示)。

图5 点云数据导入绘图软件中

图6 在点云上绘制的立面图
相对于在立体相对或在正摄影像图上绘制立面图,在点云数据上绘制立面图可实时查看结构线位置是否正确。方法是通过旋转三维视图来从不同角度查看线条与点云数据的贴合程度(如图7所示)。
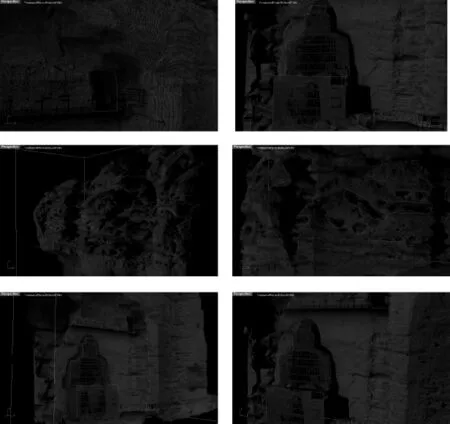
图7 从不同角度观察点云与线条的贴合度
使用点云数据生成的立面图中,等高线是通过点云处理软件自动生成的:由于每个点的坐标都已记录在系统中,软件可以自动搜索并连接指定高程的点,完成等高线的绘制。在图中,把等高线和结构线分成不同的图层和颜色显示,便于修改。
TIN网的创建:使用点云数据生成岩壁的表面模型时,只需要在点云处理软件中选择相对应的命令,并指定最大的三角网边长和最多的三角网个数,系统就会根据需求完成三角网的构建。不同于近景摄影测量软件通过图像点生成DEM内插点来生成TIN模型,点云处理软件直接使用测量得到的目标点来构建TIN,无需内插,精度更高。
(2)洞内扫描
本文在炳灵寺的上百个石窟中,选择了其中的一个洞窟进行扫描和数据处理。数据采集和编辑的步骤类似于上述洞外岩壁采集步骤,因此仅描述了主要的处理过程。
1)点云扫描。不同于在洞外对岩壁进行扫描,洞窟内的壁画遍布洞四周的墙壁以及洞顶。因此在扫描时,要保证点云数据的采集360°无缺漏。
GLS-1500扫描仪具有一个特点:竖直放置时扫描角度为水平向上35°,水平向下35°。如果以竖直放置的方式进行扫描,则无法完成洞窟内顶部壁画的扫描,必然会在扫描数据中留下空洞。因此,在采集过程中,配置了倾斜云台,使扫描仪可以以任意的角度旋转,这样就可以完成360°无死角的扫描工作了。
2)洞内数据模型制作。由于点云数据是非连续的离散点,为了更好地展示壁画,需要将点云数据制作生成表面连续的模型。根据高密度的点云数据制作的TIN模型可以最大程度地详细表达壁画的纹理、结构和凹凸(如图8所示),可以更加清晰具体地保存这些古老而精美的壁画。
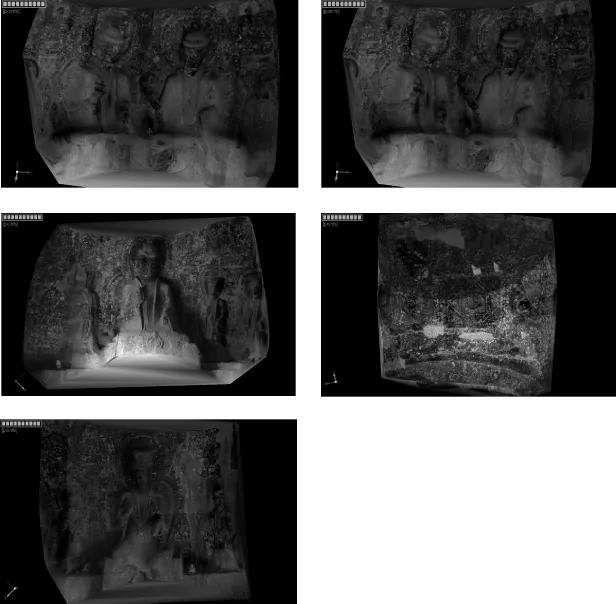
图8 各个方向的壁画模型
四、结束语
完成点云数据、影像数据、立面图和TIN模型的制作后,便可将其打印成图或以电子形式归入信息数据库中。这样,数据库中不仅包含每个古建筑维护项目的影像数据和立面图图纸,还有精确反映文物坐标信息的点云数据、精确且连续的文物表面信息(TIN模型)。从而实现了文物在尺寸、颜色、位置、结构等方面长久保存的目的,且保存的数据可方便地和未来的新测量数据进行对比,便于工作人员对文物的风蚀、水蚀及其他自然现象所引起的变化及时发现,并快速高效地进行分析和修缮。
[1]冉启兵.古建筑修复测绘方法的研究[J].福建工程学院学报,2009,7(1):19-21.
[2]王莫 .三维激光扫描技术在故宫古建修缮工程中的应用研究[J].世界建筑,2010(9):146-147.
猜你喜欢
青年文学家(2021年15期)2021-07-19 02:40:48
飞天(2020年8期)2020-08-14 10:07:31
数字技术与应用(2020年1期)2020-04-21 07:40:59
智慧少年·故事叮当(2019年8期)2019-09-03 11:26:04
作文大王·笑话大王(2017年6期)2017-06-28 16:44:57
黑龙江科学(2016年5期)2016-03-24 10:32:23
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
现代营销·经营版(2015年3期)2015-04-20 06:46:58
江西测绘(2014年3期)2014-07-18 12:08:54
户外探险(2014年4期)2014-04-28 20:06:40
