
基于协同服务的移动实时测图系统
2012-12-11 06:08:52张海涛高莎莎杜国庆
测绘通报 2012年1期
张海涛,高莎莎,杜国庆,江 畅
(1.南京邮电大学地理与生物信息学院,江苏南京210003;2.南京师范大学地理信息科学江苏省重点实验室,江苏南京210097;3.江苏省测绘局,江苏南京210013)
一、引 言
随着空间技术、信息技术、“3S”技术(GPS、RS和GIS技术)等现代高新技术的发展和在测绘领域的渗透与融合,测绘技术体系经历了传统的模拟测绘、数字测绘的变革,进入了信息化测绘时代[1,2]。
空间数据采集、制图作为信息化测绘的重要环节,其精确性、实时性是决定整个测绘流程效率的关键。传统的测图方法:内、外业分离的测图模式以及简单移动测图的方法均存在效率低、不适合多群体并行作业的大规模测图工程的缺点。为此,本文提出基于无线数据实时传输的内、外业一体化的移动测图模式,并重点研究移动测图系统中群体协同服务的方法。实践证明,基于协同服务[3]的移动测图系统可以显著提高多群体并行作业的大规模测图工程的效率。
二、传统的移动测图及存在问题
目前,测图作为信息化测绘的重要组成环节,其组织、管理、调度水平仍显滞后,典型的作业方法包括两种模式。
1.内、外业分离的测图模式
测图作业严格划分为两个相对独立的阶段:外业数据采集与内业制图[4]。该模式的主要缺点是割裂了测图作业的整体性,外业数据采集过程中不能及时、有效地发现错误(编码错误、测漏、重测以及精度超限等),待内业数据制图时才发现问题,往往无法弥补,通常需要进行再次或多次的返测,引起大量的重复劳动,造成人力、物力资源的浪费。
2.移动测图模式
内业制图功能移植到外业数据采集设备上,实现空间数据采集、制图的一体化。主要有3种实现方法。
1)全站仪+PDA的方法。建立PDA与全站仪的串口通信,在PDA设备上存储坐标点、编码等,进行简单的数据质量检查与成图。
2)RTK流动站+手簿的方法。手簿为RTK厂商配套专用的智能设备,完成与流动站设备的数据集成与简单成图。这两种简单移动测图的方法虽对传统的内、外业分离的制图模式所有改进,但是在应用过程中存在较大的局限性:野外作业的环境恶劣(户外显示文字和图形的能力有限,工作环境的湿度、温度等很容易引起数据采集处理设备电子器件的损坏)且移动设备所宿主的移动计算环境资源有限(CPU运算能力、存储空间、屏幕大小与分辨率以及电池电量等因素)。因此,简单的移动测图模式并不能太大地提高测图作业的效率。
3)集成多种导航定位和测图传感器的车载移动测图系统(mobile mapping system,MMS)。MMS是目前最先进的测图方法,具有独立成图(无需借助地图和传统测图方式即可完成道路电子地图的测制)、测量成果全面(空间坐标、矢量数据以及连续的三维图形等),而且能够有效融合其他来源数据(可与航片、卫片以及传统地形图进行有效融合,从而生成信息更为全面的地理信息)以及高效率(能够以60 km/h的速度完成外业测图工作)等优点[5]。
但MMS方式存在的最大缺点是:采用独立作业模式,不能充分利用分布式网络资源进行并行处理,因此MMS空间数据处理、分析运算能力有限,不适合多群体并行作业的大规模测图工程。另外,MMS费用太高、设备复杂、采集数据精度低,且作业区域受限(对于野外环境比较恶劣,车辆无法到达的区域则不能进行作业),因此只适合于城市景观、市政公用设施数据的测图工程。
三、基于协同服务的移动实时测图
1.系统架构
移动数据通信技术的发展,为空间数据的大批量、实时、高效地无线传输奠定了基础。本文提出基于移动数据通信技术,构建一种具有移动数据采集系统与后台制图系统实时、协同交互信息功能的移动测图模式。该模式可以同时发挥移动数据采集系统的快速获取空间信息以及内业制图系统强大的数据分析与制图功能的优势,大大提高移动测图作业的效率。系统架构如图1所示。系统基于C/S模式的分层架构设计,包括移动数据采集系统和内业制图系统。
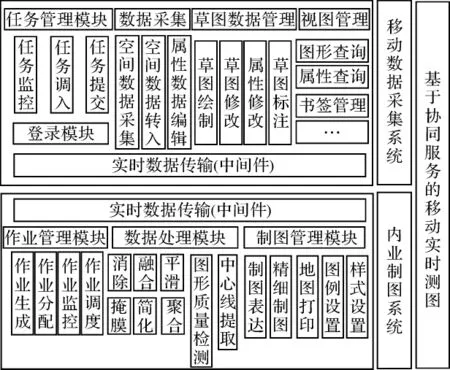
图1 系统功能框架
移动数据采集系统包括:登录管理、任务管理、RTK数据、草图数据、视图操作;内业制图系统包括:作业管理、数据管理、制图管理以及站点管理。实时数据传输(中间件)是连接两个子系统的核心功能模块,其采用Stub/proxy的设计模式。宿主于移动数据采集系统的Stub负责测量数据的实时发送、内业制图系统分析处理结果的实时接收,而宿主于内业制图系统的proxy则完成测量数据的实时监测、识别,以及内业制图系统协同处理结果的实时发送等功能。
2.多群体作业的协同服务
在大规模的测图工程中[6],通常需要大量的移动数据采集系统并行、协同工作。设计一种多个移动数据采集系统之间以及移动数据采集系统与内业制图系统之间信息交互的协同服务模型是有效解决移动数据采集系统之间作业冲突、动态调度作业,提高整体测图工程效率的关键。
(1)作业单元
移动数据采集系统进行数据采集的基本作业单元(job)仍采用图幅(MapNO)管理的方式。首先,根据数据采集区域的空间范围、生成系列符合国家标准的图幅。然后,依据作业环境、移动数据采集系统的数量等因素,将指定的图幅集分配给某一作业单元,同时为作业单元内指定要采集的数据类型(layer)。最后,将特定的作业单元分配给某一移动数据采集系统(station)。作业单元的基本构成要素之间的关系,如图2所示。
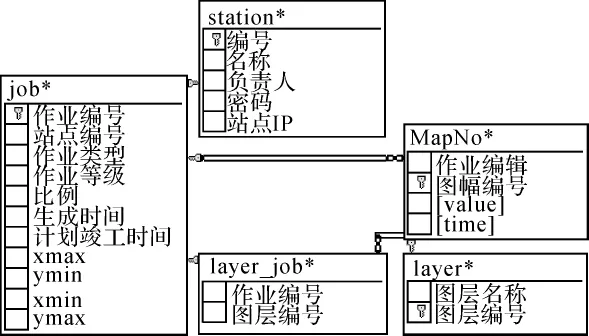
图2 作业单元构成的E-R图
(2)移动数据采集系统与内业制图系统的协同交互
移动数据采集系统与内业制图系统之间的信息协同交互通过移动Web服务实现。协同交互的基本操作包括:作业任务生成与分配、作业任务调用、作业实施、作业数据提交、作业数据检查处理以及数据制图等。
具体的操作流程包括:
1)内业制图系统调入作业区域背景图,依据移动数据采集系统的数量与空间位置分布生成符合国家标准的MapNo,并将其分配给具体的job,然后将job分配给station。系统功能界面如图3(a)所示。
2)登录移动数据采集系统,通过作业调入模块,加载为其分配的job。系统功能界面如图3(b)所示。
3)移动数据采集系统使用接入JSCORS网络的RTK模式,在其job范围内进行快速的高精度数据采集[7],并编辑其属性信息。对于不能使用测量设备作业,且对定位精度要求不高的空间数据,可以使用草图绘制功能进行编辑。系统功能界面如图3(c)所示。
4)移动数据采集系统完成作业后,进行简单成图与数据质量检查,然后将完成的job任务提交到内业制图系统。系统功能界面如图3(d)所示。
5)内业制图系统接收移动数据采集系统提交的作业数据,进行数据分析与质量检查。如果不能满足要求,将错误与修改要求即刻发送回移动数据采集系统修正错误或重新作业,否则内业制图系统即利用数据处理功能模块进行数据制图预处理,最后进行数据入库、制图、打印输出,功能界面如图3(e)、3(f)所示。移动数据采集系统与内业制图系统的协同交互的基本流程如图4所示。

图3 移动实时测图系统功能界面
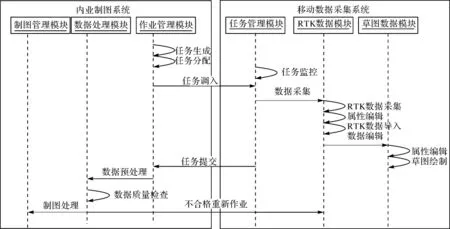
图4 移动数据采集系统与内业制图系统协同交互
(3)移动数据采集系统之间的协同交互
移动数据采集系统之间的协同交互采用中心数据库的交互模式,即移动数据采集系统之间的信息交互需通过内业制图系统的任务管理模块进行转接。采用协同交互模式的主要原因是:移动数据采集系统的空间作业范围通常比较大,基于P2P的短距离无线数据交互无法满足需求。移动数据采集系统之间的协同交互的流程如图5所示。具体操作步骤包括:
1)移动数据采集系统在作业的过程中,由于环境、人为等因素的变化,往往需要对既定的作业进度进行动态调整。移动数据采集系统依据其作业进度情况,提出任务调度请求。
2)内业制图系统接收任务调度请求,作业管理模块通过对整个测图工程的所有作业任务的监控(系统功能界面如图3(d)所示),依据作业范围的空间分布、作业进度控制等因素,生成优化调度模型(系统功能界面如图3(e)所示),并依据调度模型算法的生成预案,调度移动数据采集系统处理调度任务。
四、结束语
随着智慧地球、物联网等概念的提出,对地理空间信息的需求更为迫切,海量、高精度的地理空间信息的快速获取以及实时专题地图制作成为当前测绘技术发展的新挑战,针对传统的内、外分离作业模式以及简单移动测图模式的数据测图系统存在的效率低、应用范围有限等缺点,本文提出了一种基于协同服务的移动实时测图模式,并给出了基于模式的系统架构设计方法以及移动数据采集系统与内业制图系统的协同交互的基本流程。本文设计的移动实时测图系统,已经在接入JSCORS系统的数据采集业务中成功应用。实践证明,在应用于移动数据采集系统群体并行、协同工作的测图工程中,该系统具有较高的效率。
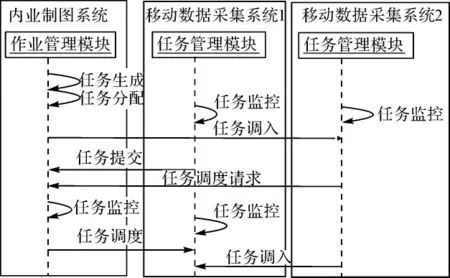
图5 移动数据采集系统之间的协同交互
[1]李德仁,苗前军,邵振峰.信息化测绘体系的定位与框架[J].武汉大学学报:信息科学版,2007,32(3):189-192.
[2]宁津生,杨凯.从数字化测绘到信息化测绘的测绘学科新进展[J].测绘科学,2007,32(2):5-11.
[3]杨胜文,史美林.协同服务:从群体到面向服务的协同系统[J].通信学报,2006(11):148-153.
[4]杨晓明,王军德,时东玉.数字测图(内外业一体化)[J].北京:测绘出版社,2001.
[5]梁诚.面向GIS的车载空间数据采集系统研究[D].南京:南京师范大学,2007.
[6]付洪波,李伟,于喜旺.浅谈西部测图工程野外测绘工作如何进行有效管理[J].测绘与空间地理信息,2008,31(4):215-217.
[7]宋玉兵,丁玉平,沈飞.JSCORS的建设与最新进展[J].测绘通报.2009(2):73-74.
猜你喜欢
建材发展导向(2022年12期)2022-08-19 02:32:00
地理信息世界(2021年2期)2021-08-14 02:11:02
农村青少年科学探究(2021年11期)2021-02-24 09:53:18
西部交通科技(2021年9期)2021-01-11 12:55:36
中国交通信息化(2019年3期)2019-06-18 11:07:36
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
江西建材(2018年4期)2018-04-10 12:37:50
中国资源综合利用(2017年2期)2018-01-22 02:45:02
华东师范大学学报(自然科学版)(2017年1期)2017-02-27 13:41:14
中国房地产业(2016年2期)2016-03-01 01:25:35
