
机载InSAR测制1∶10 000数字测绘成果精度分析
2012-12-11 06:08:00苗小利
测绘通报 2012年1期
苗小利
(西安煤航技术发展研究院,陕西西安710054)
一、引 言
机载干涉合成孔径雷达(InSAR)技术,经过近20年的研究,其理论日臻成熟,并且由于雷达干涉测量具有全天时、全天候工作的优点,可以直接获取地形的高程信息,其应用领域也得到不断推广。许多欧美国家已将实用化的机载高分辨率InSAR技术作为一种新的、先进的技术手段,逐渐应用于地形测绘方面;而我国地形测绘应用则处于起步阶段,“十一五”期间,在国家863计划的支持下,笔者所在单位在四川省绵阳试验区进行了4000多平方千米的飞行扫描,开展了机载InSAR测制1∶10 000 DEM、DOM、DLG的示范应用研究。本文介绍了这次试验的工艺流程和作业方法,分析了3D数字测绘成果的精度及其影响因素。
二、机载InSAR测制数字测绘成果工艺流程和方法
雷达干涉测量(InSAR)是基于时间测距的成像机理,利用雷达回波信号所携带的相位信息,以获取地表的高程信息。其原理是通过两副天线同时观测,获得同一区域的重复观测数据(复数影像对),提取同一目标对应的两个回波信号之间的相位差,结合观测平台的轨道参数等提取高程信息[1],直接获得数字地表模型(DSM),如图 1(a)所示。通过滤波、编辑处理,生成数字高程模型(DEM),如图1(b)所示。
SAR影像则是由单视复型数据(SLC)的实部和虚部,计算出振幅值,然后进行灰度化变换,生成原始影像,再经过变换以及去噪声、地理编码后,生成DOM数据,如图2所示。
而DLG则是在上述DEM、DOM数据基础上测制而成,即从DEM数据派生出DLG的地貌要素数据,如图3(a)所示,从DOM数据测制DLG地物要素数据,如图3(b)所示,最后合并形成DLG成果,如图3(c)所示。
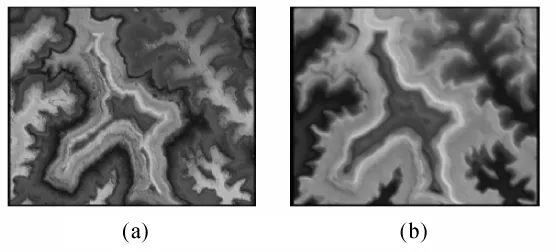
图1 DSM、DEM成果
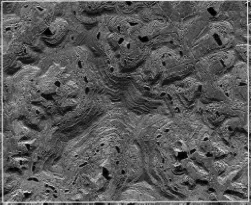
图2 DOM成果
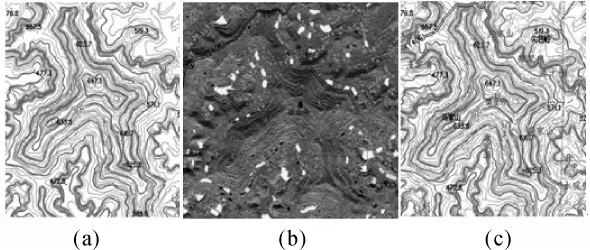
图3 DLG成果
综上所述,机载 InSAR系统测制 DEM、DOM、DLG数字测绘成果的工艺流程如图4所示。
上述工艺流程是基于单片机载InSAR数据,它具有以下优点:
1)该工艺简单明了,充分利用机载INSAR系统直接获取高精度的DSM和DOM数据。
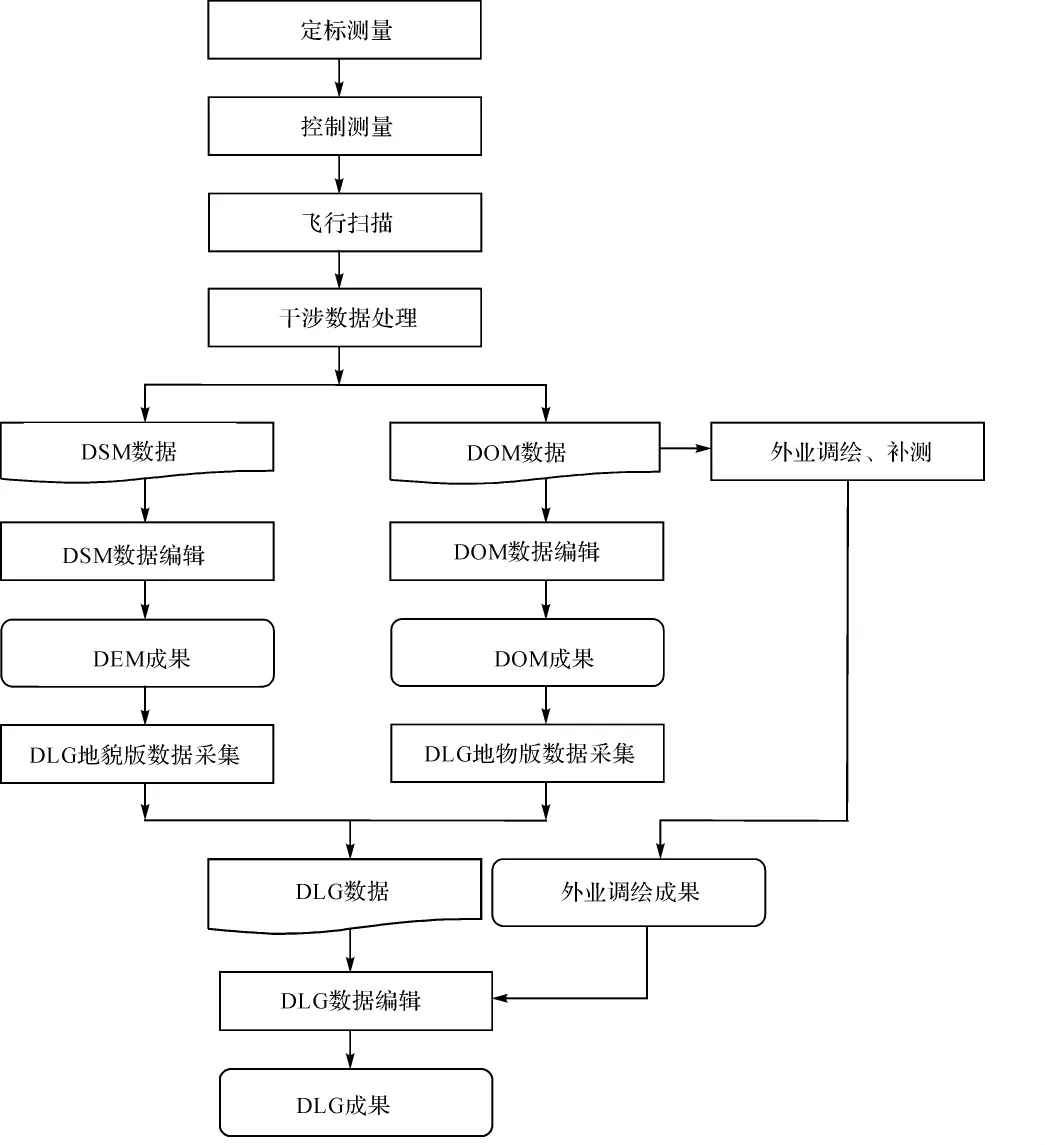
图4 机载InSAR系统测制3D成果工艺流程
2)采用该工艺生产DLG产品,无须开发新的立体测图系统,节省了生产成本,有利于新技术的推广应用。
3)可以实现一项任务多人作业的生产方式,提高了生产效率。
三、DEM、DOM、DLG 成果精度
基于上述工艺流程和作业方法,在绵阳试验区内测制完成了10幅1∶10 000比例尺的3D数字测绘成果,并抽查了3幅DEM、1幅DOM、1幅DLG成果,所用检测点均匀分布在图内、包括了各种地形地貌以及困难地区,其精度见表1~表3。
由统计结果可知,采用机载InSAR系统测制的DEM成果高程中误差在±0.5m左右,DOM成果的平面中误差约为±2.7 m,DLG成果的平面中误差约为±2.5 m、等高线及高程注记点高程中误差在±0.9m左右。
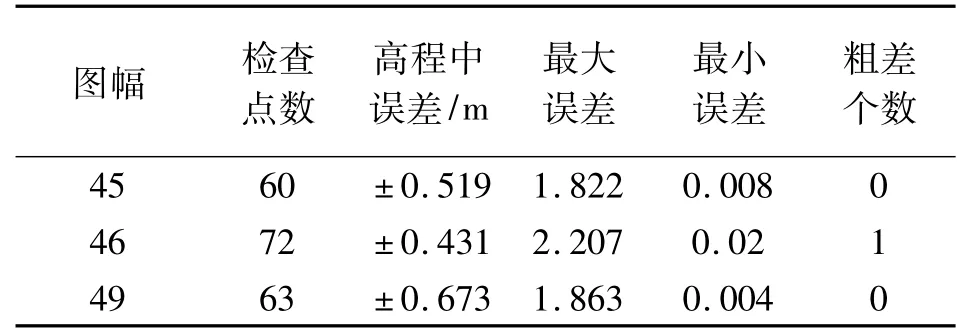
表1 DEM高程精度统计
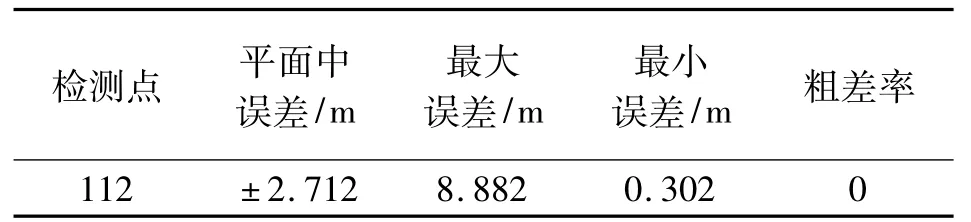
表2 DOM平面精度统计
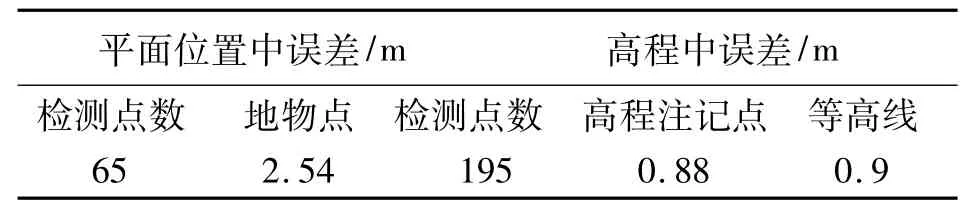
表3 DLG平面、高程精度统计
四、精度分析
1.高程精度分析
由上述工艺流程可知,DEM的高程精度直接影响着数字测绘成果的高程精度,而影响DEM的高程精度有以下几个方面因素。
1)成像雷达系统参数:通过成像雷达系统参数、姿态参数和轨道间的几何关系,可以重建地面高程模型,因此成像雷达系统的参数直接影响着DEM的质量。本文采用中科院电子学所自主研发的机载双天线、X波段的InSAR系统,研制中充分考虑到基线长度、基线倾角、干涉相位、飞行(平台)高度、雷达距离等因素对高程测量精度的影响,并给出了以上因素对高程测量误差的指标要求,从系统设计与研制环节上保证了高程测量精度优于0.5m,这一点从表1的高程精度统计中也可反映出。
2)干涉测量困难地区:即易产生叠掩和阴影的区域,包括高山区、水域、高植被区、城镇居民区等,这是受侧视雷达成像机制的制约,在这些区域中,或因地形起伏不可避免地产生阴影现象,阴影区没有回波信号,相干性差,严重影响DEM质量;或因水域部分产生镜面反射,也无法接收到回波信号,继而影响DEM质量;或因高植被区域,X波段不能穿透树冠树叶到达地面,无法得到地面的回波信号,因此影响DEM质量。为此,对密集建筑物区域、森林、道路、水域等区域的高程精度进行了统计(见表4),明显看出,这些地区的高程精度较低。
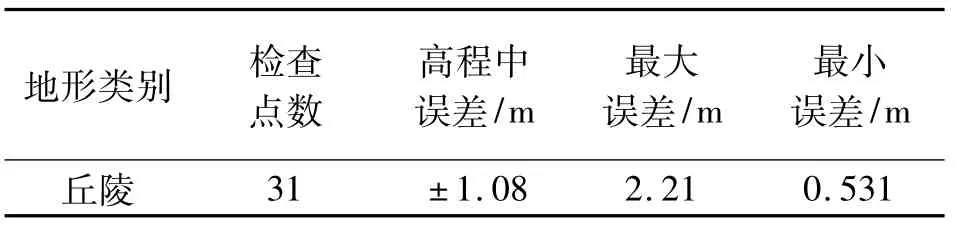
表4 困难地区高程精度统计
3)DEM滤波和编辑处理:除了上述两种客观因素的影响,后期的滤波和编辑处理也影响着DEM的精度。对于DEM滤波方法有多种,每种方法都各自有其优缺点,适用范围也不尽相同,但一般都还需要后期的人机交互式滤波和编辑。特别是小范围的“异常区”(如图5(a)所示)、静止水面(如图5(b)所示)、流动水域(如图5(c)所示)、建筑物区域(如图5(d)所示)、树林区(如图5(e)所示)等,都需要经过人机交互编辑处理后,使“异常区”正常、静止水面置平、流动水域平缓过渡、建筑物区域及树林区合理,如图6所示。
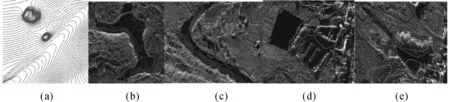
图5 DSM所生成的等高线

图6 DEM所生成的等高线
表5统计了稻田区域进行滤波和编辑处理前后的高程精度,从统计结果可以看出,采用正确的滤波和编辑处理方法,能够有效地提高高程精度。
2.平面精度分析
为了得到困难地区的平面精度,就房屋、道路交叉口、池塘等成像地物,对其DOM进行了平面精度统计,结果如表6所示。
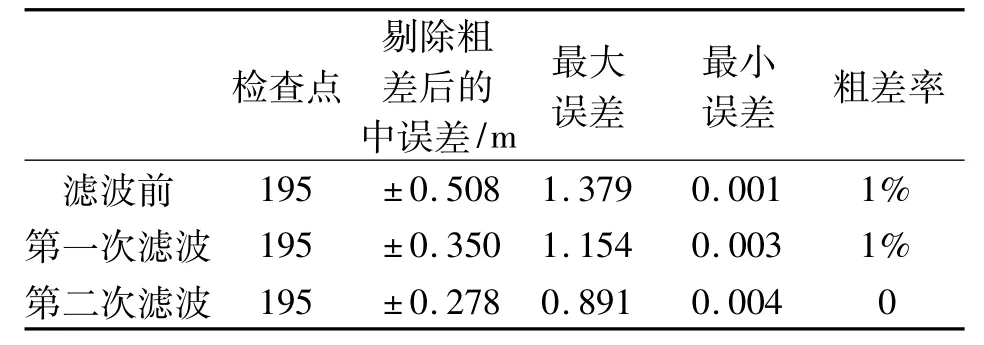
表5 滤波前后DEM精度统计
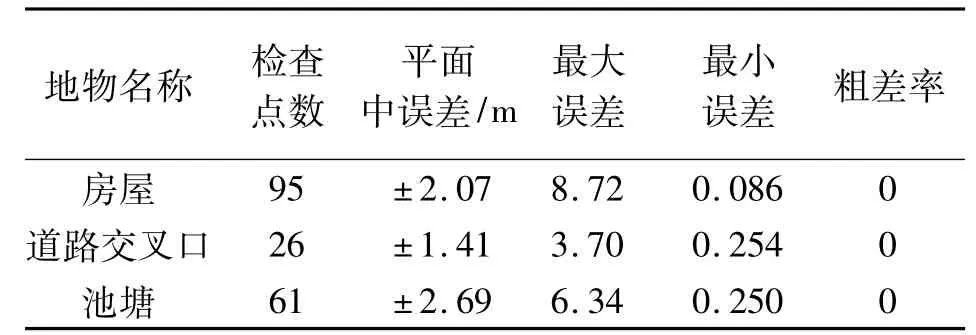
表6 1∶10 000困难地区平面精度统计
由表6统计可知,困难地区能够成像地物的平面中误差小于3m,高程中误差为±1.08 m,由此可知,机载InSAR技术的困难地区对高程影响较大,对成像地物的平面精度影响不大。
五、结束语
综上所述,通过试验区的实践,获取了大量的试验数据和检测数据。数据统计表明,我国自主研发的机载InSAR系统及其数据处理系统,经过多年的不断完善和改进,达到了设计的标称精度;通过干涉处理获取DSM的高程精度优于航空摄影测量;在此技术上生产的 DEM、DOM、DLG产品满足1∶10 000国家规范的精度要求。因此,机载InSAR系统有效地弥补了航空摄影测量受制于天气的不足,由于其具有即时飞行、成图周期短的优势,形成了一条高速的从数据获取、数据处理、智能信息提取、基础地理信息建库、更新等部分组成的全数字化数据链,必将为国民经济建设和国防建设提供高效快速的基础数据保障。
[1]廖明生林珲.雷达干涉测量——原理与信号处理基础[M].北京:测绘出版社,2003:36-41.
[2]宋建社,郑永安,袁礼海.合成孔径雷达图像理解与应用[M].北京:科学出社,2008,P57-59.
[3]CURIANDER J C,MCDONOUGH R N.Synthetic Aperture Radar:Systems and Signal Processing[M].[S.L.]:WILEY,1991.
[4]丁琼,刘国祥,蔡国林,等.InSAR DEM精度与地形特征的关系分析[J].测绘科学,2009,1(1):147-148.
猜你喜欢
中学生数理化·自主招生(2024年6期)2024-06-24 11:15:29
当代陕西(2020年23期)2021-01-07 09:24:44
中学生数理化·高一版(2020年2期)2020-04-21 07:42:50
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
全球定位系统(2015年4期)2015-02-28 12:38:13
浙江国土资源(2014年5期)2014-04-28 09:04:19
电子设计工程(2014年20期)2014-02-27 12:01:00
中国工程咨询(2014年12期)2014-02-16 06:18:34
