
无人机航测数据质量检查及成果应用
2012-12-11 06:08:40郑永明王艳梅张志霞张丽萍谷艳如
测绘通报 2012年1期
郑永明,王艳梅,张志霞,张丽萍,谷艳如
(东方地球物理公司装备服务处测量服务中心,河北涿州072751)
一、引 言
长期以来,石油物探施工中所用的基础地理数据多为国外商业遥感影像或国家基本比例尺地形图。这些数据为野外地震勘探施工提供了必要的信息,方便了勘探作业的开展。但这些数据更新比较滞后,所表达的地理信息有时与工区现状不匹配;在地物地貌复杂的工区,信息表达能力与所需求的勘探信息不相称。这些因素制约了石油勘探的作业效率的提高。
近年来兴起的无人机低空摄影测量技术是一项获取空间数据的重要手段。该技术能获取工区的正射影像和数字高程模型,展现勘探工区的三维地理信息。将无人机航空摄影测量技术引入石油勘探生产对促进石油勘探地震队信息化建设,提高石油勘探生产效率具有重要意义。
二、无人机航测系统构成
无人机航测系统由硬件系统和软件系统组成。硬件系统主要由固定翼无人机飞行平台、数字遥感设备、电源系统组成;软件系统主要包括测控地面站、遥感传感器自动控制系统、数据后处理等。
无人机航测的工作流程为:根据工程要求,收集施工区域资料和遵照民航、通航和空域管理相关规定,进行飞行前的协调;布设在地面控制点;设计航线,然后将数据上传至无人机的飞行控制装置,系统按设计航线进行航测作业;数字传感器按设计要求进行地面数据的收集;地面监测系统显示无人机飞行航迹,地面工作人员据此监视无人机工作情况;结束飞行任务,下载航测数据;利用数据后处理软件结合相机参数,影像数据,控制点数据生产测区的数字正射影像地图(DOM)和数字地面模型(DEM)和数字线划图。
三、航空飞行质量检查与应用
1.工区情况介绍
保德工区主要位于山西省忻州市保德县境内。南北长大约40 km,西至黄河东岸,东西长大约12 km,工区面积476.3 km2。测区大部分地区被较厚的黄土覆盖,由于受流水的长期侵蚀,形成千沟万壑、坡陡沟深的起伏地形。测区最高处1137 m,最低处790 m,相对高差347 m。测区的数据采集作业由固定翼无人机飞行平台承担。搭载传感器焦距为24 mm,实际飞行11架次进行,工区范围和飞行航迹如图1所示。

图1 施工区域和航迹图
2.航测数据质量评价
无人机航测所获取的遥感数据,除了在现场检查影像色调、饱和度、云和雾之外,还要从以下几个方面进行检查:
(1)影像重叠度
同一条航线内相邻的影像重叠称为航向重叠,相邻航线的重叠为旁向重叠。根据相关测量规范要求,航向重叠度一般为60% ~80%,最小不应小于53%;旁向重叠度一般为15% ~60%,最小不应小于8%。从飞行数据中随机选一飞行架次,根据机载记录数据摄影中心的直线元素,计算出旁向重叠度在 40.294% ~41.572%,航向重叠度在70.113% ~71.392%。计算结果如表1和图2所示。所选数据的影像重叠均满足低空数字航空摄影规范要求。
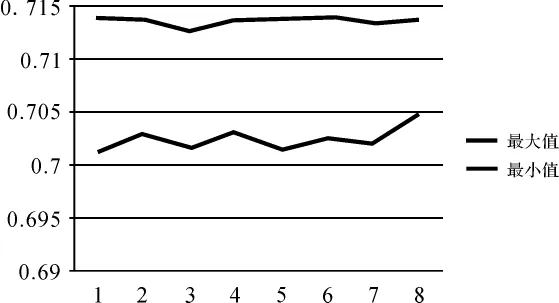
图2 航向重叠度最大最小值展示

表1 实际飞行数据的航向重叠度
(2)航带弯曲度
飞机在飞行过程中,受外界自然条件影响会出现偏离预设航线的情况。像主点偏离航线首尾连线的最大距离与航线首尾连线的长度比值称为航带弯曲度。实际飞行的航线弯曲度会影响影像重叠度。如果航带弯曲度过大,可能会产生航摄漏洞,影响摄影测量的作业。航带弯曲度不应大于3%。计算结果如表2和图3所示,所用数据最大弯曲度为0.0346%,小于测量规范限差,说明飞机作业过程中直线性飞行状态良好。
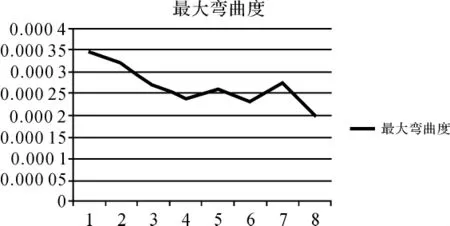
图3 所选试验数据的航带弯曲度

表2 所选试验数据的航带弯曲度
(3)航带内最大高差
无人飞机在飞行过程中,飞机实际飞行高度会偏离预设高度。测量规范要求同一航线上相邻像片的航高差不应大于30m,最大航高与最小航高之差不应大于50m。从图4飞行数据中可知,最大航高差为24.06 m,所选数据航带内最大高差为满足低空数字航空摄影规范要求。
(4)像片旋角
正影像上相邻主点连线与同方向连线的夹角即为像片旋角。一般像片旋角要求小于6°,个别最大不应大于8°,而且不能有连续三片有超过6°情况。从表3和图5中的飞行数据可知,像片旋角最大为4.81°,所选数据像片旋角满足低空数字航空摄影规范要求。
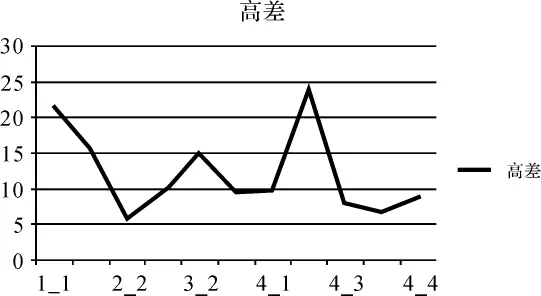
图4 测区航带内摄影中心高差显示
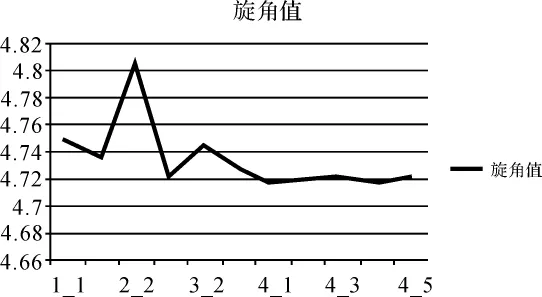
图5 测区飞行数据像片旋角

表3 测区飞行数据像片旋角统计
3.影像处理与应用
在检查外业飞行数据质量合格,不用重飞或者补飞的情况下,利用数据后处理软件,依据无人机航测内业相关数据处理规范,检查内业数据处理精度。
航测影像内业处理所参考的技术指标依据《低空数字航空摄影测量内业规范》(CH/Z 3003—2010),按成图比例尺1∶2000的精度要求,正射影像的地面分辨率应该满足0.2m。山西保德区域最终获取的影像地面分辨率为0.19 m,满足规范对于1∶2000数字正射影像图的分辨率要求。
规范要求生产数字线划图,数字正射影像图时,区域网平差结束后,基本定向点残差平面最大较差应满足在2m以内,高程最大较差应该满足在1.5m以内。成果仅用于数字正射影像制作时,高程精度可放宽。此工区所用的417个像控点做完空中三角测量后高程较差及平面位置较差如图6和图7所示。
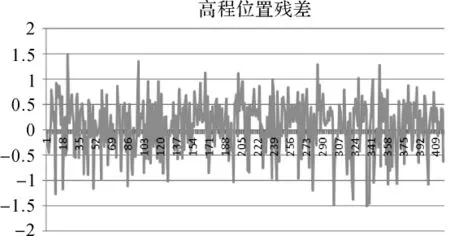
图6 像控点坐标高程较差
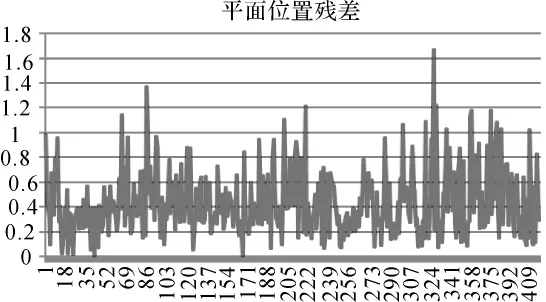
图7 像控点坐标平面较差
经计算,绝对定向点的平面位置中误差为0.465 251 m,最大较差为1.665 m;高程中误差为0.201335 m,最大较差为1.499m,满足制作1∶2000正射影像图精度要求。然后按图8所示的内业数据处理流程生产相应的正射影像和数字高程模型。
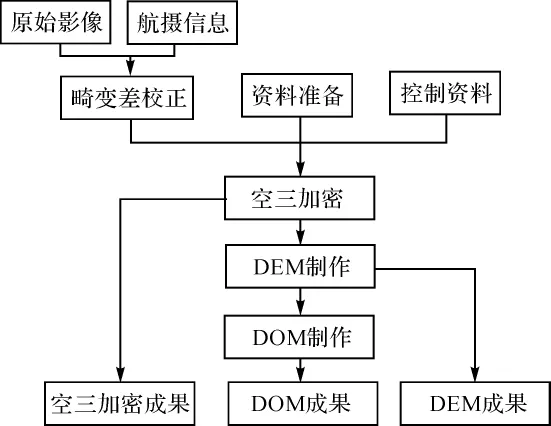
图8 无人机航测内业数据处理流程
4.数据操作与应用
生成的工区正射影像数据量较大,整个工区的影像数据量是76 GB。将影像应用于石油勘探生产,需要解决影像大数据量存储和读取问题。Arc-GIS 10对影像建立金字塔索引后,可以方便地对影像数据进行读取与显示。把正射影像和数字高程模型进行切片后放入三维显示系统,可以清晰地重现勘探工区三维场景。
本次无人机航空摄影测量所生成的基础地理数据(DOM+DEM+DLG)不但为保德12亿方产能建设自用主干道路测量工程土石方计算,坡度计算和道路施工放样(如图9所示)提供了关键的数据源,还为该区块三维石油勘探施工设计,物理点位偏移和放样,地震数据采集放线,钻井作业生产管理,工农关系协调和HSE管理提供了详细的信息支持。
图9 道路设计与放样
四、结束语
无人机航空摄影测量技术是一项技术门槛高,风险大的作业模式,尚没有在石油物探生产中形成成熟的作业流程。通过工程实践,证实了无人机摄影测量技术辅助石油勘探生产能降低石油勘探成本和周期,提高石油勘探作业效率。
随着无人机航测技术在物探生产的应用越来越深入,必将引起现行石油勘探作业模式的变革,促使石油勘探队伍建设向信息化,数字化方向转变。
[1]李德仁,周月琴,金为铣.摄影测量与遥感概论[M].北京:测绘出版社,2001.
[2]勾志阳,赵红颖,晏磊.无人机航空摄影质量评价[J].影像技术,2007(2):49-52.
[3]吕书强,晏磊,张兵,等.无人机遥感系统的集成与飞行试验研究[J].测绘科学,2007,32(1):84-86.
[4]国家测绘局.CH/Z 3005—2010低空数字航空摄影规范[S].北京:测绘出版社,2010.
[5]国家测绘局.CH/Z 3003—2010低空数字航空摄影测量内业规范[S].北京:中国测绘,2010.
[6]何敬,李永树,鲁恒,等.无人机影像的质量评定及几何处理研究[J].测绘通报,2010(4):22-24.
猜你喜欢
中国石油勘探(2022年4期)2022-09-16 06:32:36
中国石油勘探(2019年3期)2019-06-03 05:58:10
中国石油勘探(2019年6期)2019-04-03 04:44:24
航空知识(2019年1期)2019-01-11 01:34:48
环球飞行(2018年7期)2018-06-27 07:25:52
科技创新与应用(2018年35期)2018-02-28 10:36:54
山东工业技术(2017年19期)2017-09-27 11:47:10
中国石油勘探(2017年3期)2017-06-19 19:22:10
中国房地产业(2016年9期)2016-03-01 01:26:46
计算机工程与设计(2015年7期)2015-12-23 00:54:08
