
固定翼二维弹道修正弹气动特性分析*
2012-12-10 02:24:14郝永平孟庆宇张嘉易
弹箭与制导学报 2012年3期
郝永平,孟庆宇,张嘉易
(沈阳理工大学CAD/CAM技术研究与开发中心,沈阳 110159)
0 引言
旋转弹丸二维修正技术是国内外讨论的热门话题之一,目前的修正方法很多。有如文献[1]中提到的脉冲修正方式,文献[2]中提出的活动舵形式,以及文献[3-4]中提到的复合修正方式。以脉冲发动机为执行机构的优点是成本低、结构简单。由于它在很短的时间内能改变弹丸状态,所以要求精度高,在高速旋转弹丸上较难实现。活动舵方式及复合修正方式结构复杂,修正方法繁琐。文中提出了一种固定翼修正方式,结构简单,修正原理简明,并且能够连续修正。然而其气动特性是机构设计的前提,为动力学分析提供依据,目前国内对脉冲式、活动舵及复合式研究较深入,但是对固定舵方式还鲜有研究,文中通过流体计算分析了固定舵式分体及整体的启动效果,得出了修正时的气动函数曲线,为修正弹飞行稳定性及控制的研究提供了依据。
1 固定翼修正原理
弹丸飞行过程中由于受到偏航力矩及随机因素的影响而偏离预计弹道。为了使其能回到原弹道,在弹头部加装修正机构。修整机构由探测模块、控制解算模块、发电-控制电机模块及两对固定舵组成。一对舵选用差动形式,为修正机构减旋同时为发电机提供动力源。另一对同向舵提供修正力矩。修正机构通过GPS探测,弹载计算机判定弹丸是否与预定弹道偏差,如有偏差,方向如何。在无偏差情况下,修正部保持一定转速旋转,减少影响偏差量,保持弹丸飞行稳定性,此时电机提供转矩,风阻力矩,及轴承摩擦力矩形成力矩闭环,即:M电=M风-M轴。如有偏差,则多次在固定旋转角度α±30°内增大磁阻线圈电源,使同向舵风阻与偏离方向相反,使弹体返回预定弹道。其修正原理如图1所示。
图1 修正原理图
2 修正弹模型建立
2.1 舵机物理模型的建立
弹丸主要是在超音速状态飞行,这时波阻占总阻力的大部分。根据空气动力学原理,使激波的强度减弱,应该把翼型的头部削尖,使之产生附体激波,同时考虑到膨胀波的影响,尽可能的减小相对厚度[5]。
根据修正原理固定翼的修正方式,需要采用一对差动翼减旋,一对同向翼提供修正力。模型如图2所示。
应用CFD软件计算前,要对整个流场域网格离散,在网格离散时由于结构网格的网格点之间的邻近关系有序且规则,除边界点外,内部各点都有相同的邻近网格数的特点,有利于准确的处理边界条件,提高计算精度[6]。但是修正部复杂的几何外形,这就增加了划分难度。针对修正部的不对称性,文中将整个半径为2m、长5m的圆柱形流场域划分成24份,流场采用结构六面体网格划分,为了减少网格数量对修正弹弹体表面加密网格处理,采用由密到稀的划分技术,最终整个流场域划分了125万网格。计算域如图3所示,修正弹表面网格如图4所示。
图2 修正部模型图
图3 计算域网格
图4 弹丸表面网格
2.2 数学模型描述
弹丸的高速旋转,及修正部舵片的互相干扰会形成涡流,因此选择标准k-ε湍流模型[6]。在笛卡尔坐标系下:
动量守恒方程(N-S)为:
与k、ε对应的运输方程为:

根据经验,式中:C1ε=1.44,C2ε=1.92,Cu=0.09 ,σk=1.0 ,σε=1.3,C3ε=1。
3 仿真模型建立及结果分析
3.1 仿真模型建立
1)弹丸在大气中飞行,选取计算域边界条件为压力远场(pass-far-filed)、计算域流体物质为理想空气(idea-gas)、气压 P=101325Pa、温度 T=288.15K、密度ρ=1.225 kg/m3;
2)修正弹修正部相对地面静止,而弹体部高速旋转的特殊要求,壁面选择条件:修正部单独定义为静止物体-Stationary Wall、表面无滑移-壁面粗糙度系数选择0.5。弹体部相对弹轴绝对高速旋转-Moving Wall、绝对坐标系:Absolute、转速:250r/s、表面无滑移-壁面粗糙度选择0.5;
3)选择耦合求解方式,由于文中是结构网格,数值计算中差分格式选取三阶迎风格式及QUIK迎风格式仿真计算。
3.2 仿真结果分析
1)同一攻角,不同马赫数下迹线分析。为了判断模拟弹丸运动状态(头部相对地面静止,弹丸相对地面高速旋转)是否正确,应用空气粒子在飞行过程中走过的轨迹—迹线来描述。由于弹丸表面黏性的作用,空气粒子会和弹丸一起运动,其在不同马赫数下的运动轨迹如图5所示。
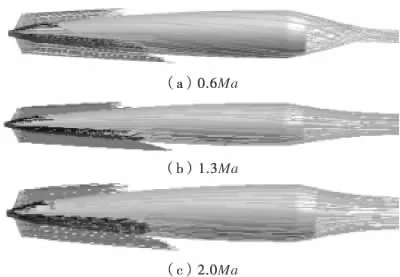
图5 迹线图
通过图5可以看出修正部是相对地面静止而弹体部相对地面高速旋转。随着马赫数的减小,这种趋势越明显。
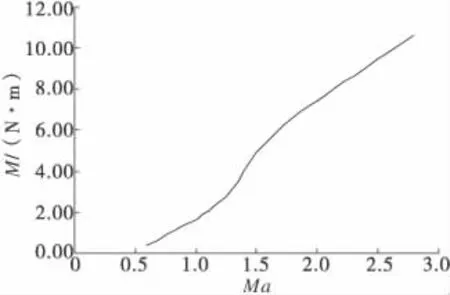
图6 差动舵旋转力矩曲线
2)舵片升力分析。取攻角为0,分别对弹 丸 在 0.6、0.9、1.1、1.2、1.5、1.8、2.0、2.3、2.5、2.8 马赫数下整体求解,对修正部单独读取数据,得出相对于弹丸质心,由同向舵产生的控制力矩,及差动舵产生的减旋力矩。其舵片旋转力矩曲线如图6,控制力矩如图7,及不同攻角下修正部的压力图如图8所示。
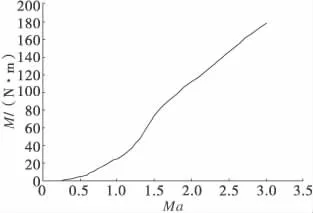
图7 同向舵控制力矩曲线

图8修正部压力图
通过曲线可得出,随着马赫数的增减控制力矩及减旋力矩增大,同时在跨音速及超音速下由于激波的突然变大而出现了阶跃。
3)阻力特性分析。修正弹在飞行过程中的阻力主要由舵片及弹头产生的头阻,底凹产生的底阻,及弹身产生面阻,在超音速飞行过程中波阻占了大部分。如图9所示弹丸阻力分布图,分析了不同马赫数情况下修正部及弹体部的阻力情况。
根据仿真结构拟合的阻力曲线,差动舵与同向舵产生的阻力几乎相等(见图10),同时随着马赫数的增加而增加,在跨音速及超音速时有力的阶跃。从阻力系数曲线可以看出(见图11),修正部最大的阻力系数出现在跨音速前大约在1.3Ma处为0.048,而弹体部由于加装修正部的气动干扰,最大嘴里系数在1.1Ma附近为 0.235。但是总的阻力系数规律和不加修正时趋势相同。

图9 弹丸阻力分布图
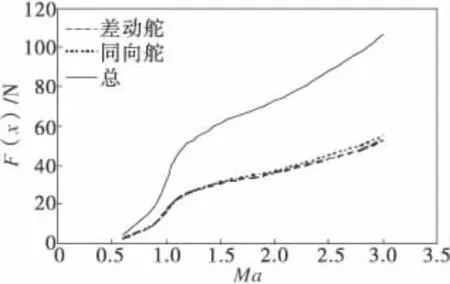
图10 舵片阻力曲线图
4 结论
文中运用CFD软件计算舵片的受力情况,得出了修正部相对于弹丸质心的控制力矩及减旋力矩,同时分析了其阻力特性,为其后的射程计算,控制设计提供数值上的参考,为动力学分析提供了依据。运用CFD运算得出的舵片的受力情况真实、直接,但其与真实模型的真实数据还有一些误差,需要风动实验加以验证。
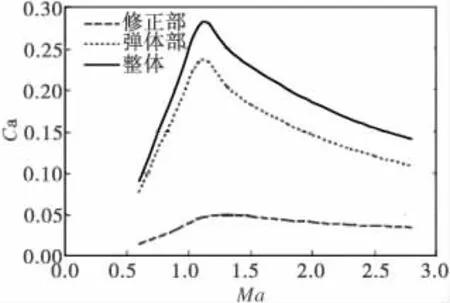
图11 修正弹阻力系数曲线
[1]姚文进,王晓鸣,高旭东.脉冲力作用下弹道修正弹飞行稳定性研究[J].弹箭与制导学报,2006,26(1):248-250.
[2]李虎全,李世义.弹道修正引信用电动舵机设计与仿真[J].微计算机信息,2009,257:7-9.
[3]邱荣剑,陶杰武,王明亮.弹道修正弹综述[J].国防技术基础,2009(8):45-48.
[4]霍鹏飞,杨小会,刘创.基于减旋的弹道横偏修正弹方法反求分析[J].探测与控制学报,2008,30(6):12-20.
[5]沈仲书,刘亚飞.弹丸空气动力学[M].北京:国防工业出版社,1984.
[6]江帆,黄鹏.Fluent高级应用与实例分析[M].北京:清华大学出版社,2008.
猜你喜欢
广东石油化工学院学报(2022年4期)2022-09-13 01:36:28
小学生必读(中年级版)(2021年12期)2021-12-02 09:04:43
数学物理学报(2021年5期)2021-11-19 07:01:30
科学技术与工程(2020年30期)2020-12-04 05:06:30
电子制作(2017年10期)2017-04-18 07:23:16
电子制作(2017年23期)2017-02-02 07:17:24
电测与仪表(2015年24期)2015-04-09 12:04:48
弹箭与制导学报(2015年1期)2015-03-11 15:32:09
电力工程技术(2014年5期)2014-03-20 14:19:38
黑龙江科技大学学报(2013年6期)2013-10-16 06:30:44
