
基于图像处理的夜视车辆检测*
2012-11-24 02:17陈柏生
网络安全与数据管理 2012年5期
陈柏生
(华侨大学 计算机学院,福建 泉州 362021)
基于计算机视觉和图像处理的交通监控技术具有成本低、可扩展性好的特点,而且能够提供比传统的地埋式感应线圈技术更为丰富和深层次的交通信息。目前,对日间条件下的交通监控国内外都已经做了大量的研究工作,并取得了一些重要的成果[1-3]。然而,作为全天候交通监控的一部分,夜间条件下的车辆监控因其复杂的光照条件一直是一个十分棘手的难题。一些发达国家采用安装红外摄像机来获取夜间道路图像[4-5],这种方法在检测夜间行人时非常有效,但是在检测夜间行驶的车辆时,仍然会受到车头灯的强光、地面反射光和环境光线的影响,而且红外摄像机价格昂贵。因此,目前较为通用的方法仍然是采用普通CCD摄像机拍摄夜间图像,通过检测图像中的车头灯来检测车辆[6-8]。
目前为数不多的关于夜间交通监控的研究都是在环境照度低、车体少部分可见的情况下进行的,提取车灯这一显著特征作为车辆检测的依据自然就成为了首选方案。事实上,目前大中城市的道路夜间光照条件普遍较好,车体可见度较高,因此提取车灯不再是夜间车辆检测的唯一方案,检测出车体轮廓进而实现跟踪和识别成为可能。本文根据夜间交通的不同环境特点,把夜间交通区分为充足照明和低照度两种情况,并采用不同策略进行处理。首先利用亮度分布的显著差异自动地判别两种情景,并导入相应的处理流程(如图1所示)。对于充足照明的情况,先使用梯度滤波对输入图像进行预处理,消除车灯、地面反光和环境光线的影响,然后结合帧间差分技术和级联形态学滤波提取车辆区域;对于低照度的情况,先检测车灯对并计算车灯对间距,然后根据车辆的结构知识定位车体。

图1 系统流程
1 环境照度判别
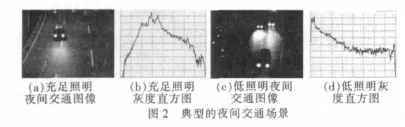
结合亮度和对比度判别夜间交通场景环境照度情况,由此决定此后将采用的检测算法和相关系统参数。图 2(a)、图 2(c)是两幅典型的夜间交通图像,分别对应充足照明和低照度的情况。由图可见,它们在亮度和对比度上有一些显著区别的特点:在充足照明条件下,图像亮度分布在一个狭窄区间,具有较高强度值,灰度直方图呈较显著的单峰造型,如图2(b)所示;在低照度条件下,亮度分布高度集中在一个极高值和极低值附近,它们分别对应黑暗背景和车灯及路面反射光区域,灰度直方图呈双峰造型,如图2(d)所示。
利用上述夜间交通场景特点,采用直方图分析技术实现环境照明情况的判别。其步骤如下:
(1)统计图像亮度平均值 al;
(2)使用 OTSU方法[9]将直方图划分成相互区隔的两部分;
(3)检测两部分的峰点对应的亮度值,设高亮度值为 h,低亮度值为l,计算两者距离d=h-l;
(4)如满足 al<Tal且 d>Td,则判别为低照度,否则判别为充足照明。
2 充足照明车辆检测
2.1 梯度滤波预处理

梯度滤波后的效果如图3(d)所示。
2.2 帧间差分
由于车灯和路面反光的影响,交通场景光线变化频繁,要获得稳定可靠的夜间背景图像非常困难,因此本文使用帧间差分方法提取运动前景。帧间差分通过在相邻帧做差来检测运动区域,其实现简单、运算速度快,而且能够避免由于背景中的车辆运动导致的“鬼影”问题。帧间差分方法的缺点是容易在运动区域产生空洞,本文使用级联形态学滤波处理进行补偿。在实验中发现,三帧差分方法能够比其他帧间差分方法获得更优的全局检测效果,并且对摄像机抖动引入的噪声有很强的抵抗性能。效果如图3(e)所示。设当前帧为In,与相邻帧差分图像为 Dn,则

进一步对差分图像进行二值化处理:

其中,二值化阈值 Tn(i,j)由以该像素点为中心的尺度Nη的滑动窗口 η(x,y)获得:

2.3 级联形态学滤波处理
路面反光、环境光线变化以及摄像机抖动引入的图像噪声经过梯度滤波预处理后并没有被完全消除,仍然有一些细小的残余噪声被作为前景像素在帧间差分操作中被检测出来。为了进一步消除这些细小噪声的影响和填充帧间差分造成的空洞,采用级联形态学滤波方法进行处理,即交替使用开、闭运算来达到双边滤波的目的:

其中,开运算XoS是对腐蚀图像XΘS用膨胀进行恢复;闭运算X·S可看作是对膨胀图像X⊕S用腐蚀进行恢复。处理后的效果如图3(f)所示。最终,充足照明的车辆检测结果如图3(g)所示。

3 低照度车辆检测
3.1 先验知识
在低照度条件下,车体大部分被淹没在背景中而不可见,如图4(a)所示,车灯几乎成为车辆唯一可利用的显著特征,因此通过检测图像中的车灯来检测车辆就成为很自然的选择。结合车辆结构的相关先验知识有助于快速、准确地检测车灯。
2016年9月22日该站主体基坑开始土方开挖,开挖方向由南向北,采用中拉槽开挖方式。2016年9月22日至2016年11月29日土方开挖对应工况见表1。
本文使用的先验知识如下:
(1)车灯区域是具有一定面积的高亮区域,利用这一特征可以排除大面积的路面反光区域;
(2)车灯区域形状近似圆或椭圆,利用这一特征可以排除环境光线引入的非似圆噪声区域;
(3)车灯总是成对出现且位置大致处于同一水平线上,形状和面积近似,利用这一特征可以最终确定车灯对。
3.2 检测车灯对
(1)图像二值化。低照度条件下,图像亮度集中在一个极高值和一个极低值附近,它们分别对应黑暗背景和高亮的车灯及路面反光,统计灰度直方图呈显著双峰型。因此,可以很方便地计算出峰值对应的亮度值,取高亮度峰值作为阈值对图像进行二值化,结果如图4(b)所示。

(3)确定车灯对。给定候选车灯区域R1和R2,其面积和紧致度分别为A1、C1和 A2、C2,计算 R1、R2图像坐标中心的水平和垂直距离分别为dx和dy,如满足式(6),则认为R1、R2是属于同一辆车的一对车灯(如图4(e)所示):

其中,TA、TC是候选车灯区域面积和圆度相似度阈值,Tdy是车灯中心垂直距离阈值,Tdx1和Tdx2限制车灯对间距大小范围。
最终低照度车辆检测的效果如图4(f)所示。

4 实验结果与分析
对充足照明和低照度两种场景进行了实验,主要参数配置如下:(1)用于场景照度判别的亮度和对比度阈值Tal=60,Td=150;(2)充足照明条件下用于车辆检测的梯度滤波系数k=128,帧间差分阈值滑动窗口大小为5×5,形态学滤波器采用形状保持较好的圆形结构元,4次交替开闭操作使用的结构元半径依次为 4、6、5、13;(3)低照度下用于车灯检测的面积阈值 Amax=150,Amin=50,紧致度阈值Cmax=50,用于确定车灯对的面积比阈值TA=0.9,圆度比阈值TC=0.8,水平中心距阈值 Tdx1=10,Tdx2=30,垂直中心距阈值 Tdy=3。 图 5(a)、图 5(b)分别是对充足照明场景下600帧图像和低照度场景下750帧图像的检测结果,全部帧序列中车辆检测率统计情况如表1所示。
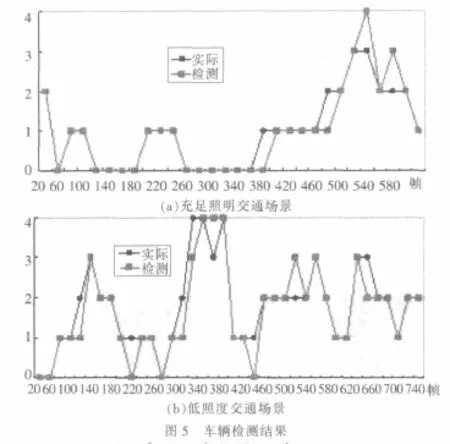

表1 车辆检测率
由实验中数据可以看出,对于两种夜间交通场景,采用本文方法基本可以达到较好的检测率,误检率都比较低,主要是因为实验中最大的干扰因素,也就是路面的反光区域基本上被梯度滤波预处理消除。误检主要发生在两种情况:(1)在充足照度条件下,大型车辆投射出强烈的灯光在路面形成的大面积强反光区域未能被梯度滤波预处理消除,而被作为运动前景错误检出;(2)在低照度条件下,当两车平行行驶且距离较近,至少有一个车灯漏检时,可能会把分别属于两辆车的两个车灯误认为是一对。在道路车辆较多的状况下漏检现象较多。漏检主要是由于以下几个原因引起的:(1)车辆相互遮挡;(2)大型车辆投射的浓重阴影覆盖其他车辆;(3)多车辆的强烈前照灯光将车辆联结成难以区分的整片。
本文提出了一种夜间车辆检测的新思路,即根据场景光照将夜间交通自动区分为有路灯照明和无路灯照明两种情况,并分别设计相应的处理流程检测夜间行驶的车辆。实验结果表明,本文方法可以较好地检测有无路灯照明两种情况下的行驶车辆,能比单纯使用车灯特征的传统车辆检测方法提供更丰富的信息用于监控系统后续的车型识别和车辆跟踪。利用检测结果进一步开展车型识别和车辆跟踪的研究将是今后工作的方向。
[1]MICHALOPOULOS P G.Vehicle detection video through image processing:the autoscope system[J].IEEE Transactions on Vehicular Technology, 1991, 40(1):21-29.
[2]OH J,LEONARD J D II.Vehicle detection using video image processing system:evaluation of PEEK videotrak[J].Journal of Transportation Engineering, 2003,129(4):462-465.
[3]楼建光,柳崎峰,谭铁牛,等.基于三维模型的交通场景视觉监控[J].自动化学报,2003,29(3):433-449.
[4]SCHREINER K.Night vision: infrared takes to the road[J].IEEE Computer Graphics and Applications, 1999,19(5):6-10.
[5]TSUJI T, HATTORI H, WATANABE M, etal.Development of night-vision system[J].IEEE Transactions on Intelligent Transportation Systems,2002,3(3):203-209.
[6]RITA C, MASSIMO P, PAOLA M.Image analysis and rule-based reasoningforatraffic monitoring system[J].IEEE Transactions on Intelligent Transportation Systems,2000,1(2):119-130.
[7]刘勃,周荷琴,魏铭旭.基于颜色和运动信息的夜间车辆检测方法[J].中国图象图形 学 报 ,2005,10(2):187-189.
[8]王鹏,黄凯奇.基于视频的夜间高速公路车辆事件检测[J].中国图象图形学报,2010,15(2):301-306.
[9]OTSU N.A threshold selection method from gray-level histognun [J].IEEE Transactions on Systems, Man and Cybernetics, 1979,9(1):62-66.
猜你喜欢
绿色建筑(2020年3期)2020-11-23
华人时刊(2019年13期)2019-11-26
摄影之友(影像视觉)(2019年3期)2019-03-30
照明工程学报(2017年3期)2017-07-10
小天使·六年级语数英综合(2017年5期)2017-05-27
铁道通信信号(2016年5期)2016-06-01
现代工业经济和信息化(2016年19期)2016-05-17
公民与法治(2016年23期)2016-05-17
汽车科技(2014年6期)2014-03-11
经营者·汽车消费报告(2013年3期)2013-05-13
