
浅谈区域重力勘查中GPS技术的应用
2012-11-15 06:46孙志刚
中国科技信息 2012年9期
孙志刚
安徽省煤田地质局物探测量队,安徽 宿州 234000
浅谈区域重力勘查中GPS技术的应用
孙志刚
安徽省煤田地质局物探测量队,安徽 宿州 234000
本文主要介绍GPS技术用于青海省鱼卡煤田1: 5 万区域重力勘查的工作,包括地面控制网的布设和测量、控制网数据处理、重力点的测量、处理和检核和精度统计,结果表明,将GPS 接收机用于区域重力勘查的工作是可行的,并且在实际工作中效果显著。
GPS;RTK;重力
概述
全球定位系统(GPS)具有全天候、高精度、高效率、自动化等显著特点,近几年来已经广泛应用于各种基础、城市以及工程测量中。青海省鱼卡煤田1:5万区域重力勘查工作,是配合青海省鱼卡煤田整装勘查项目的实施,查清鱼卡煤田的煤系地层基底的起伏形态以及较大的断裂构造。该勘查区属于高原地区、地形起伏大、河流横穿测区,因此在该地区进行重力勘查比较艰苦。
现就青海省鱼卡煤田1: 5万区域重力勘查GPS技术的实际操作为例,说明在该区域重力勘查中的应用。
1 测区概况
工作区域位于柴达木盆地北缘中段,介于南侧的绿梁山与北侧的达肯达坂山之间,西起云雾山、嗷唠山,东止小红山。行政区划隶属青海省海西州大柴旦行委。东经94°33′47″~95°15′59″,北纬37°48′43″~38°18′48″,重力勘查的面积约为1000km2,测区内以戈壁荒滩和低山丘为主,平均海拔3200~3400m,周围高山海拔可达4000m以上,鱼卡河、羊水河和嗷唠河是主要河流,315和215国道在鱼卡交汇,分别穿越该区的北部和南部。
2 作业依据与设备
2.1 作业依据
(1)《全球定位系统(GPS)测量规范》(GB/T 18314—2009);
(2)《全球定位系统实时动态测量(RTK)技术规范》(CH/T 2009-2010);
(3)《区域重力调查规范》(DZ/T 008 2—2006;
(4)《重力勘查设计书》
2.2 仪器设备
采用的仪器设备和软件:六台上海华测导航技术有限公司生产的华测X90一体化双频GPS接收机, 该接收机具有先进的测量型GNSS主板;高精度的L1、L2伪距、载波相位观测值;54通道“全视野”L1/L2载波相位观测;兼容VRS、MAX等连续运行系统等特点,其标称静态平面精度为±(5+1*10-6*D)mm;高程精度为±(10+2*10-6*D)mm,接收机在作业前均通过检验、检定,性能和精度指标符合规范要求。南方地形地籍CASS软件一套。
3 GPS 控制网布设、测量和数据处理
3.1 控制网布设、测量
由于勘查区测量面积较大,需要对整个勘查区统一布设GPS控制网,方便以后重力点测量,控制网点均匀布设在国家等级GPS点区域内,并与高等级点进行联测,联测点数不应少于3点。控制网呈三角形网状结构。控制网点位选择在远离大功率无线电发射源200米以外,高压输电线和微波无线电传送通道50米以外,交通方便,地面基础稳定,易于点位长期保存位置。[1]
工作区已有控制点情况:共有九个四等及以上等级的国家等级控制点,属1954年北京坐标系统。工作区采用平面为l954年北京坐标系,1956年黄海高程系,中央子午线经度为东经93。,6。投影分带的第16带。
GPS控制网测量使用六台华测X90双频GPS接收机,同步观测1小时以上,采样间隔10s,卫星截止高度角15。,PDOP≤6。
3.2 数据处理
采用华测HcLoader软件把观测数据下载到计算机,转换成Rinex标准数据格式,采用南方测绘GPS数据处理软件进行处理。
控制网(如图1表示)总点数33个,其中已知点6点,未知点27点。经基线处理全网由41个三边同步环,205个三边异步环组成,独立基线数103条(均为双差固定解),网点间平均点间距离为6.9公里。基线解算后对同步环、异步环、重复基线进行检核,各项精度满足要求。
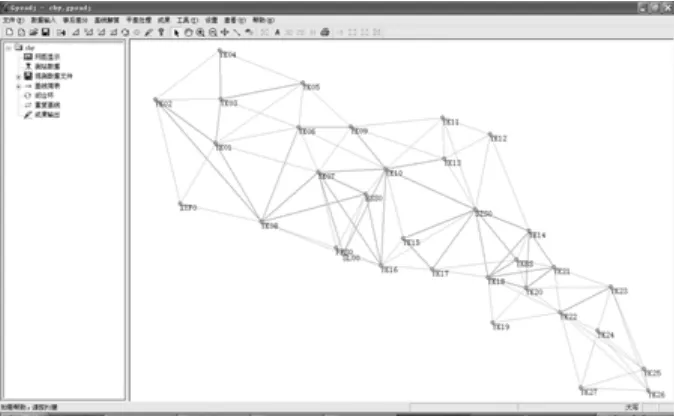
图1 控制网观测图
进行无约束平差,检核WGS一84坐标及其中误差,直角坐标及其中误差,误差椭圆,平面坐标及其中误差点位中误差及误差椭圆,平面边长与坐标方位角及其中误差,GPS观测值及其改正值和平差值。
再进行约束平差,经平差后最弱边相对中误差1:10万,最弱点点位中误差3.9cm,最弱点高程中误差4.58cm。以上数据表明,控制网成果可靠。
4 RTK基本原理、组成
重力勘查区比例尺为1:5万,网度为500×500(m),点位分布比较均匀,测量采用实时动态RTK的作业方式。使用六台华测X90双频GPS接收机, 该接收机实时动态(RTK)标称精度为±(10+1*10-6*D)mm;高程精度为±(20+1* 10-6*D)mm。
4.1 RTK基本原理
RTK(Real Time Kinematic)是基于载波相位差分的实时动态定位技术,能够实时提供测点(用户站)在指定坐标系的三维坐标成果。[2]其设备是在两台静态型测量仪器间加上一套无线电数据通讯系统(数据链),将相对独立的GPS信号接收系统连成一个有机整体。基准站把接收到的所有卫星信息(包括伪距和载波相位观测值)和基准站的信息(如基准站的坐标、天线等)都通过通讯系统传送到流动站,流动站本身在接收卫星数据的同时,也接收基准站传送的卫星数据,在流动站完成初始化后,把接收到的基准站信息传到控制器内(一般是微型计算机),并将基准站的载波观测信号与本身接收到的载波观测信号进行差分处理,即可实时求解得出两站间的基线值,同时输入相应的坐标,转换参数和投影参数,即可实时求得实用的位置坐标
4.2 RTK系统组成
RTK系统由一个基准站,若干个流动站及通讯系统三部分组成。基准站包括GPS接收机,GPS天线,无线电通讯发射设备,供GPS接收机和无线电通讯设备使用的电源及基准站控制器等部分。一个流动站包括GPS天线,GPS接收机,电源,无线电通讯接收设备及流动站显示控制器。
5 重力点测量、处理、检核和精度统计
5.1 重力点测量、处理
5.1.1 基准站和流动站设置
基准站架设在视野比较开阔,周围环境比较空旷的地方,地势比较高的地方;避免架在高压输变电设备附近、无线电通讯设备收发天线旁边,这些都对GPS信号的接收以及无线电信号的发射产生不同程度的影响。基准站上架设好GPS接收机,连接无线电设备,连接发射天线和电源,启动GPS接收机。
在流动站RECON手簿中,在 “坐标系统管理”里面新建一个新的坐标系统或配置已有的坐标系统(尤其要确定中央子午线和已经知点匹配);新建立一个作业文件,输入任务名称为yk17.rpb,选择所要工作的坐标系统;然后控制把测区已知的GPS控制点WGS84系坐标和1954年北京系坐标导入流动站控制手簿建立测区的坐标转换参数。连接好移动站,如果无线电和卫星接收正常,移动站开始初始化。显示顺序为:串口无数据!正在搜星!单点定位!浮动!固定,固定后方可开始测量工作,否则测量精度较低,然后启动流动站到已知控制点进行测量重置当地坐标,再到另外已知控制点进行检核,无误后进行重力点测量。
5.1.2 野外测量
采用RTK技术进行重力点测量,就是将设计好的每个重力点理论坐标进行逐个放样。首先把重力点理论坐标,传输至流动站手簿中,然后按照测线、测点号在实地进行逐个放样,标定其准确位置,并实时采集各个点的实测坐标和高程数据。
5.1.3 数据处理
在野外采集的重力点数据存储在流动站手簿中,在手簿测地通软件里把存储的数据导出为需要的*.CSV格式,经同步软件Microsoft ActiveSync传输至计算机中,然后进行数据整理,提供重力勘查所需的测量成果。为检查测量数据质量和控制工程进度每天测量的数据利用南方CASS软件展绘到电子施工图上面。
5.2 检核和精度统计
在重力点测量过程中,为了对RTK测定重力点的数据精度进行控制,在每日施工前;搬迁至新的参考站;接收机、手簿出现断电,死机或参考站断电造成流动站失锁等故障恢复后等情况后,须详细检查基准站和流动站的有关数据,并复测重力点或复测已知点进行检核,符合要求后,才能施工。
对野外采集的各个重力点的实测坐标和高程数据,按照全区重力点3%~5%的比例标准进行重力点复测检查,其检查计算公式如下:
Mxy—同精度检查平面位置中误差;
△X—检查值与原始观测值的X坐标之差;
△Y—检查值与原始观测值的Y坐标之差;
n—平面位置质检点总数。

Mh—同精度检查高程中误差;
△h—检查值与原始观测值的高程h之差;
n—高程质检点总数。
全区共计测量重力点3950点,检查点200点,检查比例为5%,经统计后平面中误差为Ms=±20.37cm,高程中误差为Mh=±3.52cm。此测量精度满足1:5万重力勘查测量精度的要求。
6 结论
随着GPS技术的广泛应用,在影响GPS卫星信号接收的复杂地形条件地区,比如树木茂密的林区,山丘间的峡谷等,会造成卫星信号丢失。流动站虽然可以接收到基准站电台发送的差分信号,接收机锁定不到5颗卫星,造成接收机信噪比特别低,流动站还是不能工作。这个问题会随着GPS卫星颗数的增加和俄罗斯的GLONASS以及欧洲GALILIE还有中国的北斗导航定位系统卫星的发射得到解决。
综上所述,GPS定位技术以其方便、快捷、优质、高效的特点给重力勘查的实施带来了一种新的工作方法,不仅提高重力勘查的精度和工作效率,也将创造出更大的经济效益。
[1]]肖学年,岳建利,张鹏,宋耀东等.GB/T 18314~2009,全球定位系统(GPS)测量规范[S].北京:中国标准出版社
[2]乔仰文,赵长胜,谢宏全,徐爱功.GPS卫星定位原理及其在测绘中的应用[M].北京:教育科学出版社,2000:107.
[3]郭瑞民,吕华,王明江,李玮.GPS测地技术在物化探勘查及地质普查中的应用[J].吉林地质,2004,23(2):121~122.
10.3969/j.issn.1001-8972.2012.09.055
孙志刚(1961-),男 安徽省宿州市人,工程师,现从事测绘技术的研究和生产管理工作。
猜你喜欢
导航定位学报(2022年1期)2022-02-17
化工设计(2020年6期)2020-01-13
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
劳动保护(2018年8期)2018-09-12
科教导刊·电子版(2017年32期)2018-01-09
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
电子制作(2016年1期)2016-11-07
读者·校园版(2015年7期)2015-05-14
