
道路交通危险工况分类及特征分析
2012-11-15 06:46丰烨孙丽玮左明伟梅彦利鲍方
中国科技信息 2012年9期
丰烨 孙丽玮 左明伟 梅彦利 鲍方
1、承德石油高等专科学校汽车工程系,河北 承德 067000 2、山东德州学院汽车工程系,山东 德州 253000 3、承德石油高等专科学校石油工程系,河北承德 067000
道路交通危险工况分类及特征分析
丰烨1孙丽玮2左明伟1梅彦利1鲍方3
1、承德石油高等专科学校汽车工程系,河北 承德 067000 2、山东德州学院汽车工程系,山东 德州 253000 3、承德石油高等专科学校石油工程系,河北承德 067000
本文主要对VDR(video drive recorder,可视化车辆行驶记录仪)所采集事故危险工况进行分类,形成一套完整的危险工况类别体系;对每种危险工况从导致危险工况发生的交通参与方、危险工况发生时所在道路类型、危险工况发生时速度频数分布以及时间分布等几个角度进行特征分析,为汽车主被动安全技术的开发提出新方法。
危险工况;可视化车辆行驶记录仪;主动交通安全
near-missed;video drive recorder;Active traffic safety
引言
现有的交通事故调查手段大多仅局限于对已发生事故进行事故后调查,因此事故原因分析就具有很大程度上的猜测性,而近年来出现的可视化车辆行驶记录仪(Video drive recorder以下简称VDR)可以客观精确地记录事故发生前后车辆前方图像及行驶速度加速度,以及驾驶员行为参数等信息,为全面揭示交通事故的发生机理提供了有效的手段和可靠的科学依据,在事故分析领域得到了日益广泛的重视和应用。国际上,日本国土交通省和日本汽车研究所等科研机构也分别开展了利用VDR进行交通事故/冲突的原因分析和驾驶员行为调查的研究[1]。美国交通部国家公路交通安全管理局(NHTSA)开展了“100-Car Naturalistic Driving Study”的系列研究项目[2]。国内,清华大学汽车安全与节能国家重点实验室、中国农业大学车辆与交通工程系、北京市交通管理局交通事故鉴定中心联合丰田公司选择50辆安装了VDR的出租车作为实验车辆,在北京城区开展了为期一年的调查实验,利用VDR进行交通事故/冲突调查研究[3-4]。
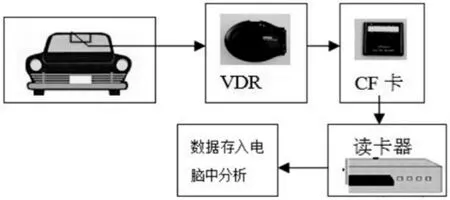
本文选择5辆安装VDR的出租车作为实验车辆,自2008年7月在上海城区开始进行调查实验。车载VDR根据预先设定的触发阀值,记录交通事故或交通冲突发生前后20s(触发前15s,触发后5s)内的车辆外部前方图像、车辆的速度、加速度信息等车辆状态和驾驶员行为等信息。采集的所有信息自动存储在CF卡中。用读卡器将CF卡中存贮数据转存到电脑中,再使用相关软件对数据进行分析处理。
数数据采集及分析流程如图所示:
本文中危险工况(near-missed)是指驾驶员在行驶过程中采取了不恰当操作或者其他交通参与者(行人等)做出违反交通法规的行为,从而导致交通参与者自身或者参与者之间产生冲突但未造成事故的情况。危险工况是交通事故的最直接原因,对危险工况的研究分析并采取措施预防能够有效遏制交通事故的发生。
1 危险工况研究方法
1.1 对所采集危险工况进行系统分类,形成较完整的类别体系。
1.2 对类别体系中的各种危险工况进行特征统计并分析。
2 危险工况分类
根据VDR记录图像信息,按照交通参与者之间相对运动形式将所采集危险工况进行分类,初步形成一个危险工况类别体系,如图所示:
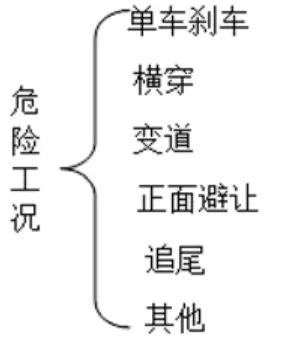
至此,本项目共采集798例危险工况,按照上述方法将数据进行分类,得到如下阶段性结论:
单车刹车危险工况337例,占41%;
变道危险工况135 例,占17%;
追尾危险工况127 例,占16%;
正面避让危险工况95 例,占12%;
横穿危险工况84 例,占11%;
其他20,例占3%。
3 各类危险工况特征统计
3.1 交通参与方

?
3.2 危险工况发生所在道路类型

?
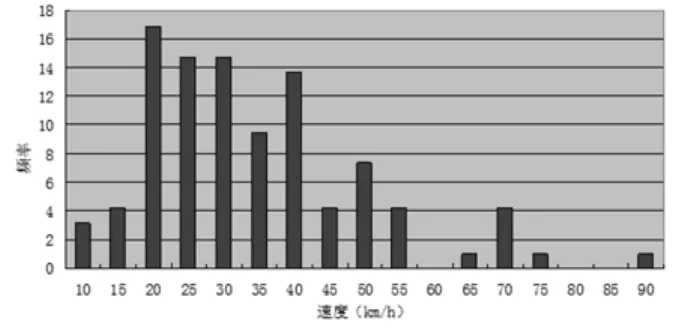
3.3 危险工况发生时速度分布
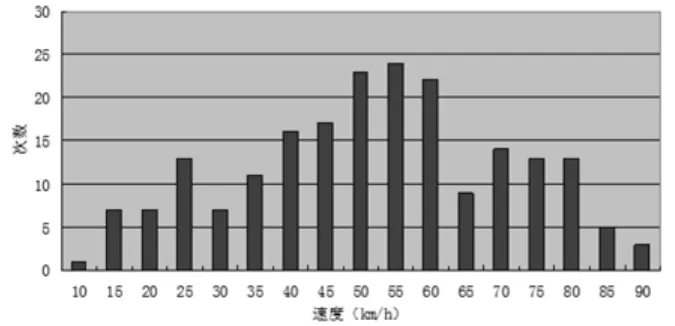
3.3.1 单车刹车:
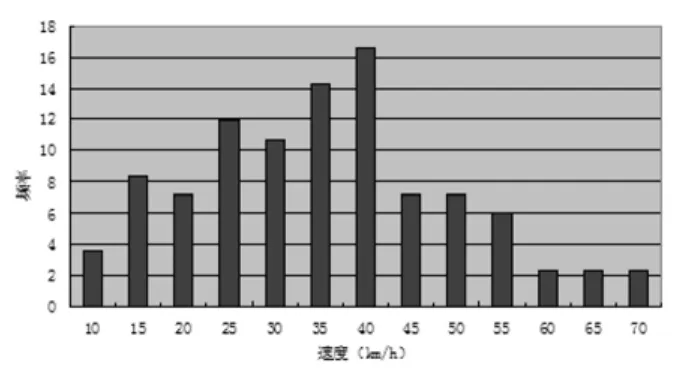
3.3.2 横穿:
3.3.3 变道:

3.3.4 正面避让:
3.3.5 追尾:

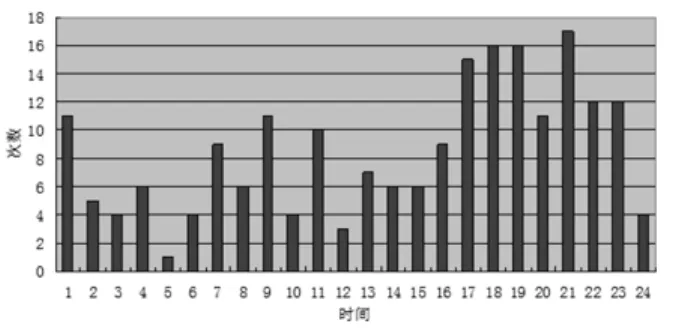
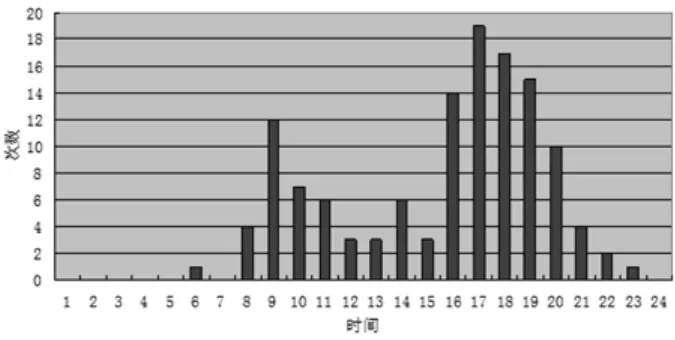
3.4 危险工况发生时时间分布:
3.4.1 单车刹车:
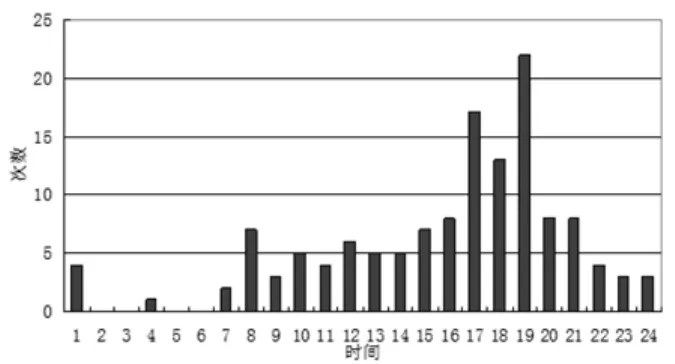
3.4.2 横穿:

4 危险工况特征分析
经过上述对各个类型危险工况特征统计进行分析可得出如下结论:
(1)除单车刹车危险工况只有自车参与外,其他几种危险工况均为两个参与方。并且汽车与汽车的危险工况均占各类危险工况一半以上。
(2) 除追尾危险工况均发生在直行道处外,其他几种危险工况发生所在道路类型既有平交口处,也有直行道处;其中横穿危险工况和单车刹车危险工况发生在平交口处要远多于直行道处,而正面避让危险工况及变道危险工况则大多数都发生在直行道处。
(3) 各类型危险工况速度分布:单车刹车(平交口)危险工况发生时速度在40km/h到60km/h范围分布较多,横穿危险工况发生前速度主要分布在15km/h~55km/h内,变道危险工况速度主要分布在25km/h~65km/h速度段内,正面避让危险工况速度主要分布在20km/h到40km/h速度段内,追尾危险工况发生速度主要分布在15~45km/h范围内。可知,单车刹车和变道危险工况发生时速度偏高,横穿危险工况和追尾危险工况发生时速度偏低。
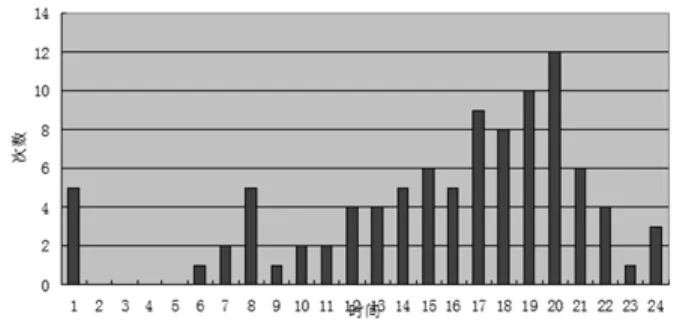
(4) 对各类型危险工况发生时间进行统计可知,16点至21点是危险工况的高发时间段,因为这个时间段车流量大并且相对于白天可见度明显降低,因此是危险工况的高发时间段;此外,8点至9点时间段由于是早高峰,车流量相对较大,危险工况发生率也相对较高。
(5) 对各类型危险工况发生原因分析后可知,导致危险工况产生的主要原因包括:车流量多,能见度低,行人及其他车辆违章,如闯红灯、横穿马路、逆行等;此外,道路设计也存在不合理之处,如路两旁绿化植被,常对驾驶员造成视线遮挡导致危险工况发生
3.4.3 变道:
5 总结与展望
3.4.4 正面避让:
3.4.5 追尾:
对VDR所采集789例危险工况,将其依据交通参与方运动形式进行详细分类,形成一套完整的危险工况类别体系。对各类危险工况从速度、发生时间、道路类型等方面进行特征统计,同时进行特征分析,得出了一定结论。
今后的工作中将继续采集危险工况,在大样本的基础上,形成一套更系统完整详细的危险工况类别体系。同时对于各类别危险工况,探索更好的方法提取出各自特征参数,能够应用到车辆安全技术开发中。
[1]N. Kubo, S. Kitajima, T. Katayama, T. Arai,“Analysis of rear-end collision near-miss and its occurrence by drive data recorder”, Proceedings.JSAE Annual Congress, no. 126~06, pp. 7~10,2006
[2]A., Lee, S. E., Sudweeks, J., Perez, M.A., Hankey, J., Ramsey, D., Gupta, S.,Bucher, C., Doerzaph, Z. R., Jermeland, J., and Knipling, R.R., “The 100-Car Naturalistic Driving Study, Phase II ! Results of the 100-Car Field Experiment”, NHTSA, Interim report DOT HS 810 593, 2006
[3]成波,林庆峰. 利用可视化车辆行驶记录仪进行交通事故/冲突的研究. 2008中国汽车安全技术国际研讨会论文集,443~447
[4]赖俊科,成波.图像式汽车行驶记录仪在交通冲突成因分析中的应用.中国农业大学学报,8,13(5):97~102
Near-missed Classify and Characteristic Analysis
Feng ye1Sun Liwei2Zuo Mingwei1
1 Automobile Engineering of ChengDe Petroleum College, HeBei ChengDe 067000 2 Automobile Engineering of DeZhou University, 253000 3 Petroleum Engineering of ChengDe Petroleum College, HeBei ChengDe 067000
The paper classified the near-missed accidents collected by VDR (video drive recorder) and formed a complete near-missed category system; analysis these categories from participants, road style,speed and time spread, in order to propose a new method for the development of automotive active and passive safety technology.
10.3969/j.issn.1001-8972.2012.09.041
猜你喜欢
物流技术与应用(2022年5期)2022-06-17
承德医学院学报(2022年2期)2022-05-23
河北金融年鉴(2021年0期)2021-08-25
河北金融年鉴(2020年0期)2021-01-21
照明工程学报(2019年3期)2019-07-09
中华诗词(2017年3期)2017-12-01
科普童话·百科探秘(2015年6期)2015-10-13
伴侣(2015年5期)2015-09-10
大众科学(2015年10期)2015-09-10
海军航空大学学报(2014年6期)2014-09-07
