
可见光变焦镜头结构优化设计
2012-11-06 05:49:20程志峰
中国光学 2012年2期
程志峰,李 明,程 欣
(中国科学院长春光学精密机械与物理研究所
中国科学院航空光学成像与测量重点实验室,吉林长春130033)
1 引言
现代光电跟踪侦察平台被广泛应用于各种海、陆、空光电火控侦察系统,其装载系统中的有效载荷多以红外或可见光镜头为主。为了满足战场发现、识别和跟踪的需要,镜头普遍采用连续变焦系统。由于受材料结构、制造工艺、环境温度和安装方式等方面的影响,连续变焦的光轴一致性很难保证。光轴偏移量的大小直接影响设备的指向精度,因此有必要对高低温工况下的光轴变化进行定量的估算[1-3]。
UG是美国UGS公司发布的CAD/CAE/CAM一体化的三维参数化设计软件,它在航空航天、汽车、通用机械等领域有着广泛的应用。UG提供了一个基于过程的产品设计环境,使产品的开发设计、加工和分析实现了数据的无缝集成。该软件不仅具有强大的实体造型、曲面造型、虚拟装配和产生工程图等设计功能,而且在设计过程中可以进行有限元分析、机构运动分析、动力学分析和仿真模拟,提高了设计的可靠性[4]。
本文根据变焦镜头的光学设计结果,初步确定镜头的光机结构初始方案。对初始方案中影响光轴偏移量的主镜筒及其安装基座的安装方式进行了有限元仿真。利用UG的CAE模块预估镜筒自身的变形量,进而间接估算出光轴偏移量。最后对不同的安装方式进行了优化,依据优化结果确定了最终的安装方式。对镜头实物进行了振动试验和光学传递函数检测,振动试验结果表明:结构动力学特性良好;光学传递函数检测结果表明:光学系统成像质量良好,可满足指标要求[5]。
2 光学镜头结构设计方案
通常,变焦光学镜头由物镜组件、变倍组件、补偿组件及后固定组件等几部分组成,这些组件均装在同一个主镜筒内,主镜筒作为主要支撑零件通过安装架安装在安装基面上,因此,主镜筒随温度的变化将直接导致光轴的变化。如果主镜筒及其安装架采用不同的安装方式,光轴产生的变化量将有所不同,同时对整个系统的光学成像质量也产生直接的影响。
依据光学设计的初步方案,本文对系统进行了初步的光机结构设计,如图1所示。主镜筒和安装架均采用常规的铝合金材料,系统工作温度(-40~+55℃)较宽,安装架结构形式的确定对光轴晃动量有着显著的影响[6-7]。
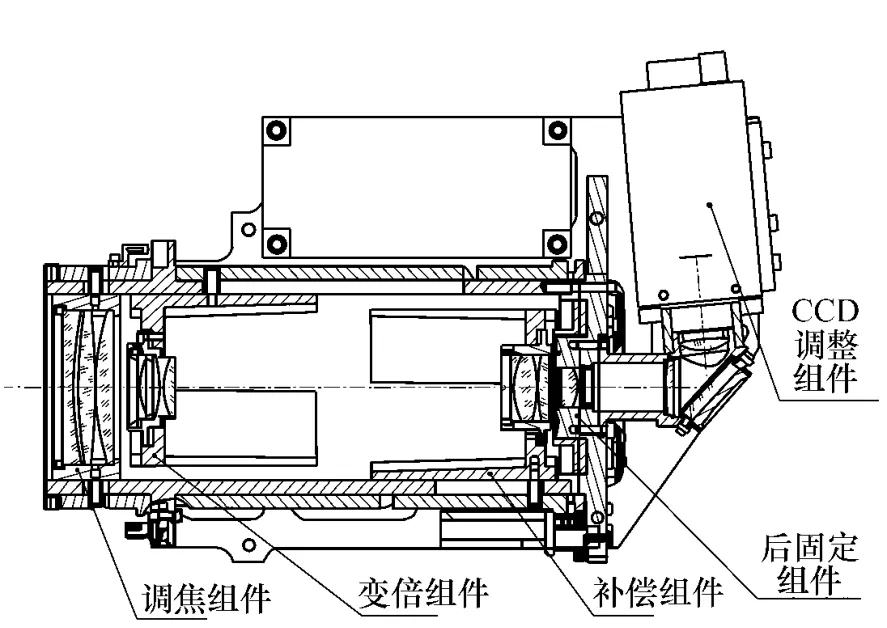
图1 光机结构初步方案Fig.1 Preliminary scheme of optomechanical structure
3 主镜筒及其安装架结构优化设计
3.1 模型的建立[8-9]
利用UG建模模块建立主镜筒及其安装架模型,再利用NX/Natran高级仿真模块对此模型进行合理的简化,并移除不重要的特征以简化分析计算,主镜筒及其安装架理想化模型如图2所示。

图2 主镜筒及其安装架理想化模型Fig.2 Idealized model of drawtube and its bracket
3.2 划分网格
单元网格的类型是10节点四面体网格,全局网格单元大小为9.5 mm,在零件中单元总数为8 515个,节点总数为17 995个。划分网格后的模型如图2所示。镜头主要结构参数如表1所示。

表1 镜头主要结构参数Tab.1 Main structural parameters of lens
3.3 定义材料
选择材料库中的金属ALUMINUM_2014,其材料相应默认属性如表2所示。

表2 材料属性Tab.2 Material properties
3.4 施加温度载荷、边界条件并分析解算
情况1:
(1)温度载荷
初始温度为20℃,对各表面施加-40℃温度载荷。
(2)边界条件
坐标系定义:
X轴正方向为垂直于安装基面向外,Y轴正方向为沿光轴方向,按右手定则确定Z轴方向。

图3 位移变形图Fig.3 Diagrams of displacement distortion
主镜筒前后两端沿X向和Z向的变形量不一致将直接导致光轴的变化。
对主镜筒安装架前端侧面两定位面进行约束,其中一个为固定约束,另一个仅限制X方向的平动。
(3)分析结果
通过运行解算,可以得到主镜筒沿X方向和Z方向的位移变形,如图3所示,通过将节点的两位移数值进行均方根处理,可得到节点的幅值变化量。
利用识别工具,分别测出镜筒前端和后端筒壁边缘处上下左右4个点沿X向和Z向的位移,并分别取均值,可以分别求出镜筒前端和后端光心的位置变化,取两者之差,并除以镜筒长度即可估算出光轴偏角,所得计算数据如表3所示。

表3 低温工况下约束前端两定位面光轴变化计算数据Tab.3 Data of optical axis variation with constraint of two front surfaces in low temperature situation
情况2:
(1)温度载荷
对各表面施加-40℃温度载荷。
(2)边界条件
对主镜筒安装架前端侧面两定位面进行约束,形式同情况1,同时对其后端侧面一定位面进行约束,仅限制其X方向的平动。
(3)分析结果
通过运行解算,得到主镜筒沿X向和Z向的位移变形如图4所示。
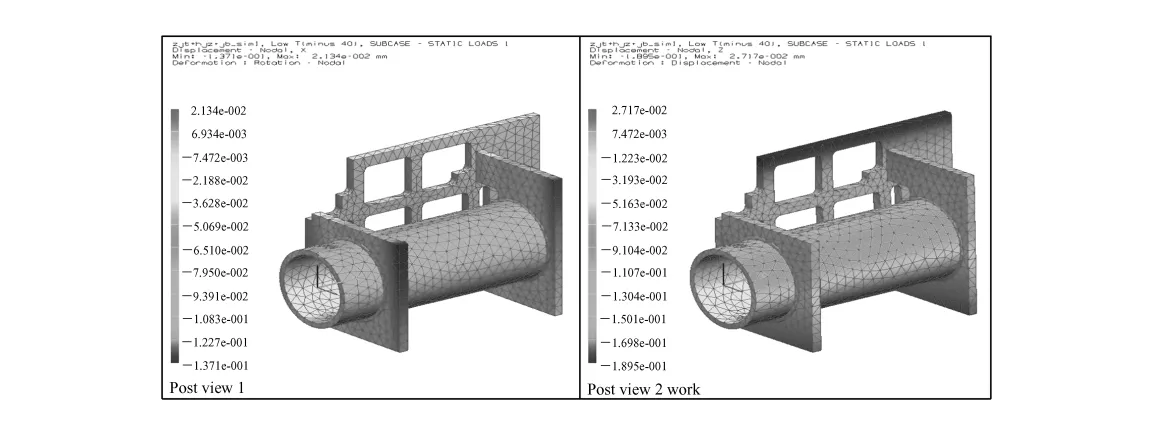
图4 位移变形图Fig.4 Diagrams of displacement distortion
同理,所得计算数据如表4所示。

表4 低温工况下约束前端两定位面及后端定位面光轴变化计算数据Tab.4 Data of optical axis variation with constraint of both two front surfaces and back surface in low temperature situation
对比上述两种情况可知,低温工况下(-40℃),情况1的光轴变化量为0.11 mrad,而情况2的光轴变化量仅为0.02 mrad,为前者的1/5,可见同时约束前端两定位面和后端定位面的效果要明显优于仅约束前端两定位面。同理,可比较高温工况下(+55℃)两种不同约束方式对光轴产生的影响,结论与低温工况下一致。综上所述,安装主镜筒及其安装架时,前端两定位面和后端定位面同时限制较为合理。
4 试验及检测
依据以上分析和设计结果,对镜头实物进行了加工,经过装调后,设计实物如图5所示。对装调后的镜头做了振动和高低温试验,振动试验过程中变焦镜头能够一直保持清晰成像,表明结构支撑稳固可靠。高低温试验后,对光轴晃动量进行了重新检测,实测结果为0.8',小于指标要求的1'。
图6是镜头进行振动的实况,依据实际使用情况,进行工装设计。最终得到振动曲线如图7所示。由图7可知,结构的基频高达171 Hz,满足伺服带宽的需求。系统自身动力学特性好,保证了在实际使用情况中成像稳定清晰。

图5 加工装调后的镜头Fig.5 Rested lens after processing and adjustment

图6 振动试验Fig.6 Vibration test

图7 振动曲线Fig.7 Vibration curve
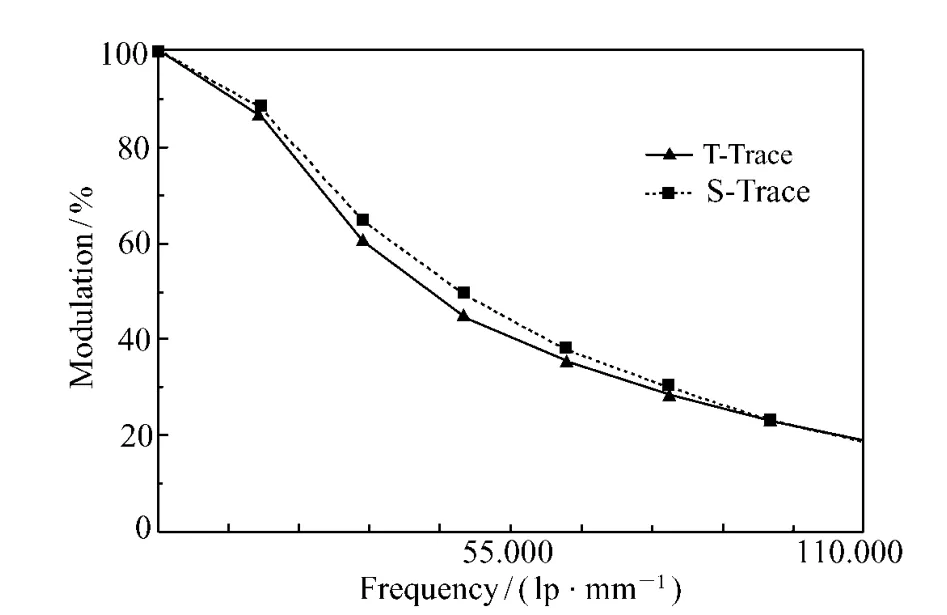
图8 光学系统调制传递函数曲线Fig.8 MTF curve of optical system
图8 是光学系统检测后的调制传递函数曲线,在频率为108lp/mm时,MTF>0.2,数值较高,相较于光学设计的理想设计值0.28损耗较小,达到了比较满意的效果。
图9是实际成像试验,系统成像稳定清晰,层次感强,取得了较为满意的效果。

图9 试验图像Fig.9 Test image
5 结论
通过在UG高级仿真模块下对施加热载荷主镜筒变形情况的有限元分析,提出了一种光轴偏移估算方法,间接求得了光轴的偏转角度;对比不同约束条件,找到了一种较为合理的安装方式。依据分析结果制备了可见光变焦镜头,并进行了相关的环境试验。试验结果表明:成像稳定清晰,实际测试得到的传递函数值比理论设计值损耗小,外场成像质量良好。结果显示,提出的结构设计方案较为合理,较好地满足了系统指标要求。
[1]王平,李林,任志文.沉筒式数码相机变焦镜头结构仿真分析[J].北京理工大学学报,2003,23(4):461-463.WANG P,LI L,REN ZH W.Simulative design for auto-zoom lens's canister style configuration of a digital camera[J].Journal of Beijing Institute of Technology,2003,23(4):461-463.(in Chinese)
[2]胡君,王栋,孙天宇.现代航天光学成像遥感器的应用与发展[J].中国光学与应用光学,2010,3(6):519-533.HU J,WANG D,SUN T Y.Application and development of recent space optical imaging remote sensors[J].Chinese J.Opt.Appl.Opt.,2010,3(6):519-533.(in Chinese)
[3]王平,张葆,程志峰,等.变焦距镜头凸轮结构优化设计[J].光学 精密工程,2010,18(4):893-898.WANG P,ZHANG B,CHENG ZH F,et al..Optical design of cam structure of zoom lens[J].Opt.Precision Eng.,2010,18(4):893-898.(in Chinese)
[4]金逢锡,金虎杰.变焦镜头结构形式的最佳选择方法[J].光学仪器,2004,26(1):34-38.JIN F X,JIN H J.Structural style's the best select device of vari-focus lens[J].Opt.Instrument,2004,26(1):34-38.(in Chinese)
[5]程志峰,张葆,崔岩,等.高体份SiC/Al复合材料在无人机载光电稳定平台中的应用[J].光学 精密工程,2009,17(11):2820-2827.CHENG ZH F,ZHANG B,CUI Y,et al..Application of high volume fraction SiC/Al composites in unmanned airborne photoelectric stable platform[J].Opt.Precision Eng.,2009,17(11):2820-2827.(in Chinese)
[6]徐蓉,门涛,张荣之.临近空间平台光电探测系统在空间态势感知中的应用[J].中国光学与应用光学,2010,3(6):546-553.XU R,MEN T,ZHANG R ZH.Application of near space platform based photoelectric detecting system to space situation awareness[J].Chinese J.Opt.Appl.Opt.,2010,3(6):546-553.(in Chinese)
[7]钟兴,贾继强.空间相机消杂光设计及仿真[J].光学 精密工程,2009,17(3):621-625.ZHONG X,JIA J Q.Stray light removing design and simulation of spaceborne camera[J].Opt.Precision Eng.,2009,17(3):621-625.(in Chinese)
[8]王忠素,翟 岩,梅贵,等.空间光学遥感器反射镜柔性支撑的设计[J].光学 精密工程,2010,18(8):1833-1841.WANG Z S,ZHAI Y,MEI G,et al..Design of flexible support structure of reflector in space remote sensor[J].Opt.Precision Eng.,2010,18(8):1833-1841.(in Chinese)
[9]卢锷,颜昌翔,吴清文,等.空间光学遥感器环境适应性设计与试验研究[J].中国光学与应用光学,2009,2(5):364-376.LU E,YAN CH X,WU Q W,et al..Research on adaptability of optical remote sensor in mechanical and space thermal environment[J].Chinese J.Opt.Appl.Opt.,2009,2(5):364-376.(in Chinese)
猜你喜欢
中国交通信息化(2022年12期)2022-02-11 12:05:14
环境技术(2021年2期)2021-07-03 14:55:24
摄影之友(2020年12期)2020-12-23 09:39:39
百科探秘·航空航天(2020年2期)2020-03-02 07:44:43
天文学报(2018年6期)2018-12-20 08:45:50
摄影之友(影像视觉)(2018年1期)2018-03-22 01:11:57
中国公共安全(2017年9期)2017-02-06 03:05:28
大众摄影(2014年9期)2014-09-17 17:34:58
应用光学(2014年3期)2014-06-01 03:37:36
应用光学(2014年6期)2014-03-27 02:03:30
