国外先进航空光电载荷的进展与关键技术分析
2012-10-30 08:48:40沈宏海李嘉全刘晶红
中国光学 2012年1期
沈宏海 ,黄 猛,李嘉全,刘晶红,戴 明,贾 平
(中国科学院 长春光学精密机械与物理研究所中国科学院航空光学成像与测量重点实验室,吉林 长春130033)
1 引 言
掌握战场态势的发展和瞬时变化的情报信息是获取未来战场主动权的关键,实现这一目标,需要能精确、实时地采集情报信息的系统装备。过去主要由光学侦察卫星和有人驾驶侦察飞机承载这类装备,但用侦察卫星对某一区域进行全天连续监视,必须拥有一个庞大的星群,其装备费用十分惊人。目前,机载态势感知系统以其灵活快捷的优点在这一领域倍受关注。根据所执行的任务,机载态势感知系统可搭载不同类型的有效载荷,包括:光电传感器( 可见光传感器、红外传感器) 、情报传感器( 电磁情报、通信情报) 、机载预警雷达( AEW) 、合成孔径雷达( SAR) 、磁场异常探测、声检测、远距离雷区探测、核生化检测和监测、通信中继、目标特征信号模拟、诱饵和干扰机等。上述各种有效载荷是侦察飞机执行任务时不可或缺的设备,是飞行器发展的动力。
随着军事对抗技术的发展,如何提高有人机的战场生存能力,避免或减少飞行人员伤亡或被俘事件是各国面临的难题。用无人飞行器平台对高风险战区实现近距离精确侦察逐渐成为解决上述难题的最佳方案。无人侦察机执行任务的灵活性,弥补了远程和空间平台的不足,它能通过数据链向地面指挥中心、地面站或其它用户提供分辨率很高的实时图像,特别适用于目标识别、精确定位、打击指引和效果评估[1-2]。
本文介绍了近年来国外航天载荷,尤其是无人机光电载荷的现状和发展,并对关键设备存在的问题进行了讨论和分析。
2 国外装备及研制现状
2.1 可见光、红外探测器的研究现状
目前光电传感器主要工作区域为0.4 ~12 μm,图1 显示了可见光探测器和红外探测器的发展趋势。可见光探测器已由早期的768 ×576 模拟制式的线阵探测器向大面阵数字制式方向发展,CCD 的成像质量已经趋于完美,分辨力和色彩还原能力已与35 mm 甚至67 mm 胶片不相上下,覆盖面积还略有差距。线阵列CCD 的像元数在20 000 左右。典型的单片面阵CCD 参数为1 Kpixel ×1 Kpixel ~10 Kpixel ×10 Kpixel,高清3CCD 为1 920 pixel × 1 080 pixel,大 面 阵CMOS 为1 Kpixel ×1 Kpixel ~5 Kpixel ×4 Kpixel。对于被非军方组织用于航空成像的大画幅数码相机,绝大多数采用多相机、多镜头结合中画幅CCD 阵列,比如微软Vexcel 的UltraCam 和Intergraph 公司的DMC 数码型摄像机系统。由微软Vexcel 推出的最新一款相机UltraCam-X 最终的全色影像尺寸由8.6 ×107pixel 增加到1.33 ×108pixel[3-6]。
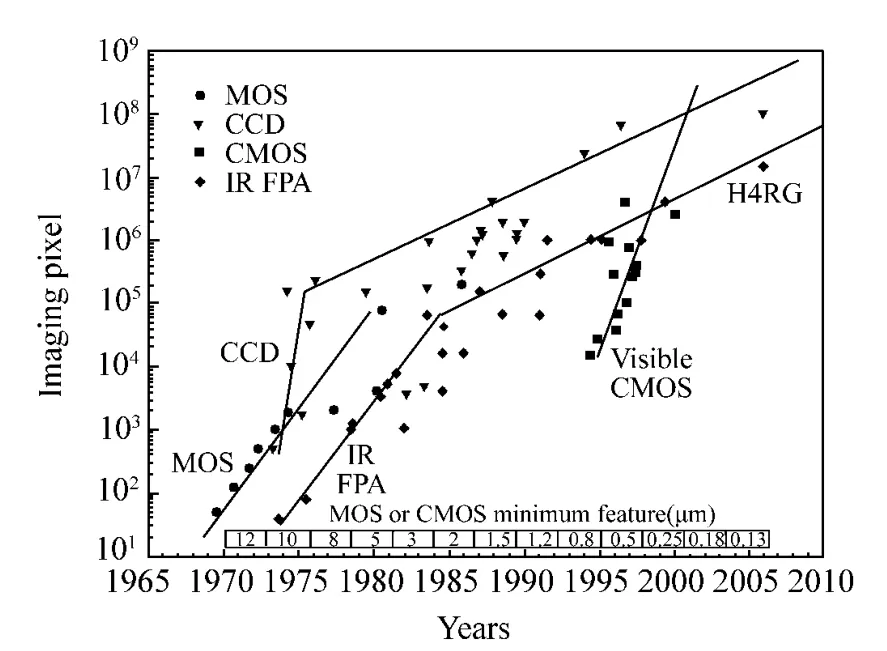
图1 可见光、红外探测器的发展Fig.1 Development of visible,infrared image sensor
红外探测器已经发展到第三代,国外普遍应用的尺寸为640 pixel ×480 pixel,DB-110 航空相机采用两片512 pixel ×484 pixel 的探测器拼接,CA-270 为2 016 pixel×2 016 pixel 的探测器。针对像元少、分辨力低的缺点,红外探测器多采用微扫描或拼接方法提高分辨力[7-15]。
在红外、可见光探测器齐头并进的同时,国外已经开始研制双色或多色探测器。Selex 等公司实现了640 pixel×512 pixel 的中波和长波双色红外探测器的量产,中、短波线阵双色探测器已经达到6 000 pixel 的水平,雷神公司基于焦平面阵列( FPA) 处理的灵巧型探测器( AIRS) 在等效噪声温差( NETD) 、非均匀性( NUC) 校正、动目标探测机理及边缘增强方面取得了显著效果[16-18]。
2.2 国外典型光电感知设备
美国在军用飞行器领域的发展最为迅速,光电装备也一直在引领着各国的发展,其应用范围已经由最初的侦察监视,逐步向满足远程告警/预警、网络化协同作战、快速打击、察打一体、无人作战等需求方向拓展,其探测器谱段也由传统的可见光、红外、激光的多光谱侦察成像,向高光谱、超光谱成像方向发展[4-22]。多频谱瞄准系统( MTS)吊舱、电光目标瞄准系统( EOTS) 和DB-110 航空相机也体现了这一技术的发展趋势。
2.2.1 捕食者无人机MTS 吊舱
捕食者系列无人机的编号由RQ-1 演变为MQ-9,反映了“捕食者”飞机从侦察型到多任务型的演变。MQ-9 是一种中高空、长航时、多任务无人机系统。它具有持久滞空能力,在作为情报收集平台的同时,还可用于猎杀时敏目标。其综合传感器组件包括具有移动目标指示能力的合成孔径雷达及MTS-A/B 光电吊舱( B 型主要针对高空应用作适应性设计) 。图2 所示MTS 吊舱由雷神公司研制,它由转台单元( 内部安装了惯性测量单元( IMU) ) 和电子处理单元组成。转台单元内部装有红外/可见光电视、激光测距机、激光指示器和激光照射器,其内部还可提供多波长传感器,近红外和彩色可见光摄像机、照射器、人眼安全激光测距机、光斑跟踪器等一系列安装选项。这些先进设计提供了一个清晰的发展路线,即图像融合和其他通过增加电路而实现的性能增强技术。图3 对比了MTS 吊舱图像融合前后的图像,融合输出的图像信息量明显优于单一波段的图像。MTS吊舱系统采用雷神研制的局域图像处理技术( 一种自动的图像优化技术) ,它可以最大限度地显示图像信息,提高态势感知和远距离监视能力。吊舱内部的图像跟踪器具有重心、区域和特征跟踪模式。未来的发展中,可能装载Talon Radiance 超频谱成像器,可穿透树叶探测隐蔽的地面目标[9-10]。

图2 MTS-A/B 及其装机照片Fig.2 Graph of MTS-A/B and its installation
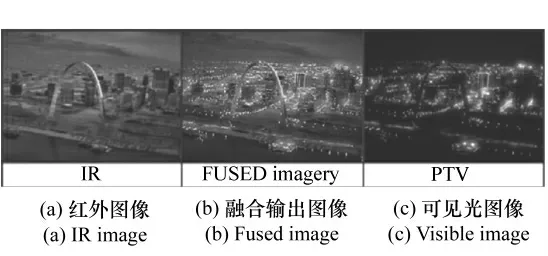
图3 MTS 吊舱的输出图像Fig.3 Output image of MTA pod
表1 列出了MTS 吊舱的典型参数,系统采用了先进的数字架构,提供了远距离监视、目标获取、跟踪、测距和激光指示功能,可用于AGM-114地狱火导弹、北约激光制导武器的制导。
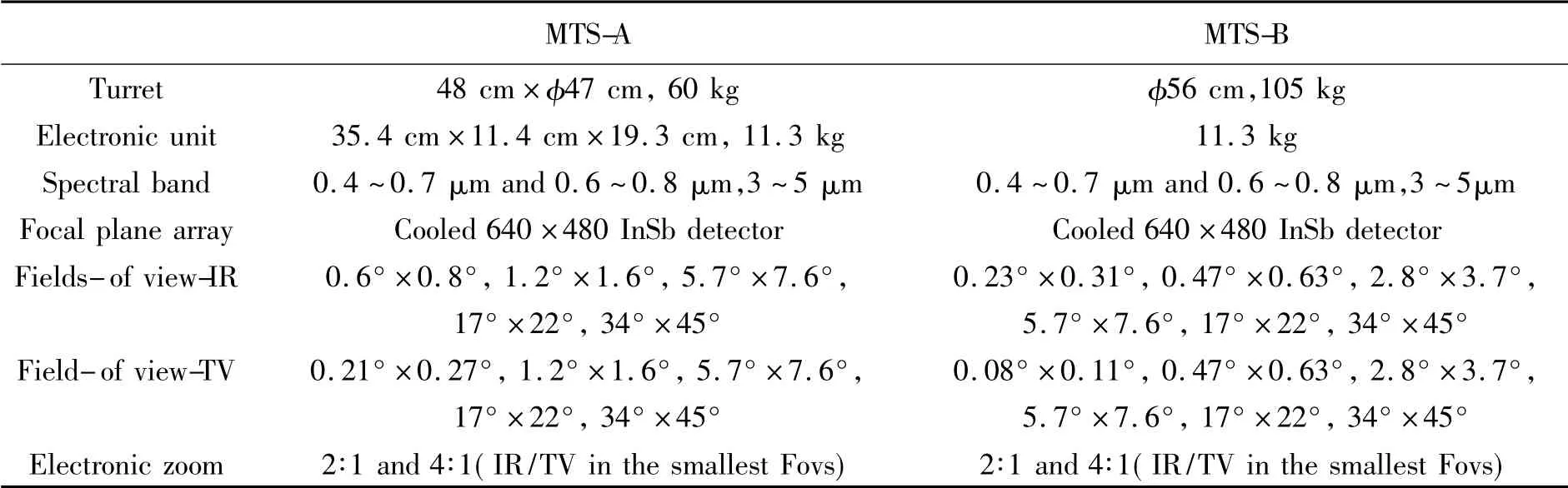
表1 MTS 吊舱的典型参数Tab.1 Parameter of MTS pod
2.2.2 F-35 内藏式光电瞄准系统( EOTS)
由洛克希德-马丁公司导弹与火控部研制的EOTS 于2005 年首飞,2007 年装备在F-35 上。该系统安装于机腹内,其性能与夜间低空导航及目标定位( LANTIRN) 吊舱相仿,但是没有吊舱特有的气动阻力等问题。EOTS 采用了由7 片蓝宝石玻璃拼接而成的单口径共光路形式,集成了空面前视红外( FLIR) 和空空红外搜索与跟踪( IRST) 系统。EOTS 的隐身和气动性能有效保证了飞机的全向攻击能力[11]。
图4 所示的EOTS 由可见光摄像机、红外成像、激光器测距机、点跟踪器、激光指示器组成,全重90.8 kg(200 lb) 。具备可见光高分辨率成像、自动跟踪、红外搜索和跟踪、激光指示、测距和激光点跟踪等功能,并且可以在雷达干扰状态下,实现目标的远距离跟踪、识别、探测和预警。关键部件及功能如下:
(1) 第三代红外3 ~5 μm 焦面阵列器件;
(2) 英国BAE 公司人眼安全二极管泵浦激光测距/目标指示器;
(3) 激光光斑跟踪器;
(4) 德国TNO 物理与电子实验室提供的红外传感器修整算法;
(5) 自动化的视线与机身对准;
EOTS 可与雷达互相补充,如果通过雷达发现一个感兴趣的地面目标,飞行员可以选择光学变焦或电子变焦进行进一步探测、识别、跟踪和瞄准,甚至在150 km 距离外就可以进行确认。随后,飞行员可以利用区域跟踪和点跟踪模式,分别锁定固定设施和移动车辆。此外,EOTS 还将作为一种远程IRST 系统,用来探测和识别空中目标,实现对敌方飞机与导弹超远距离识别、跟踪和瞄准,从而增加预警距离和己方攻击及反应时间,提高自我生存能力。
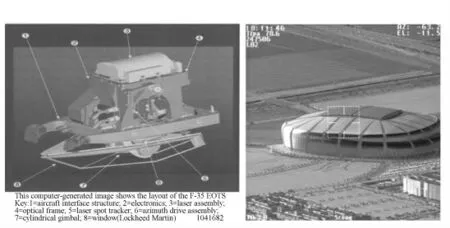
图4 EOTS 的组成及其输出的红外图像Fig.4 EOTS's structure and IR output image
2.2.3 第三代DB-110 传感器
DB-110 传感器[12-15]最初形成于20 世纪90年代中期,现在已经发展成全功能、集成式的侦察系统套件,可用于任何空中侦察平台。它已经在旋风战机、F-111、F-15、F-16、捕食者B 上成功试飞,并可提供高质量的图像。第三代DB-110 传感器系统集成在定制的侦察吊舱内,该吊舱安装在战机的中线上,内部环控系统确保其最高工作高度可达到15 240 m。第三代DB-110 是一个双波段系统,其最主要的特征是在单一部件内实现了3 个视场:
(1)2 794 mm(110 in) 焦距的可见光/近红外窄视场和1 397 mm(55 in) 焦距的中波红外;
(2)406 mm(16 in) 焦距的可见光/近红外宽视场和356 mm(14 in) 焦距的中波红外;
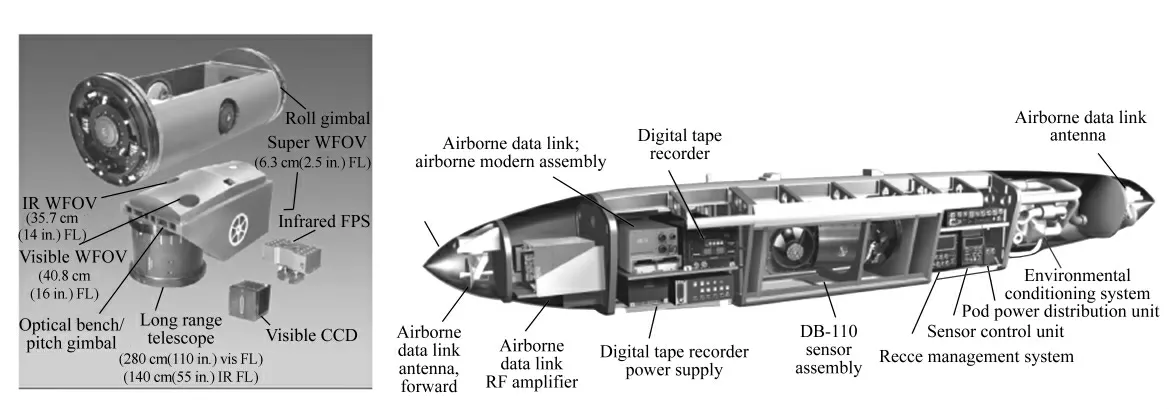
图5 DB-110 的主要部件及承载吊舱的内部结构Fig.5 Parts of DB-110 and the structure of pod which contains the DB-110
(3)64 mm(2.5 in) 焦距的中波超宽视场。
可见光FPA 在横向扫描方向由6 144 pixel组成,像元间距为8.75 μm; 红外焦平面采用640 ×512 阵列、像元尺寸为24 μm 的商用货架产品。图5 显示了DB-110 的基本组成,它有两个用来扫描和图像像移补偿的主动轴、可见光/红外的焦平面阵列、双波段窄视场的镜头。表2 为其主要性能参数。
DB-110 通过垂直于飞行方向扫描地面,利用摆动和倾斜扫描收集图像。在扫描收集过程中,飞机飞行的方向通过传感器的倾斜运动加以补偿。扫描周期的最后,倾斜运动使得传感器视场到下一个扫描的开始处。下一个扫描可以设计为重叠,从而可以得到地面的连续覆盖。在连续覆盖方式中,通过设置传感器大于50%的重叠率,可获得立体图像。图6 说明了DB-110 可见/红外图像信道的主要扫描方式。其他的扫描方式包括对地面上的同一点从各个方面重复覆盖。图7 是DB-110 在阵风飞机上装载时获取的英国Farnborough 机场图像和局部放大图。飞机和塔台的细节很好地展示了图像的高分辨力特性。
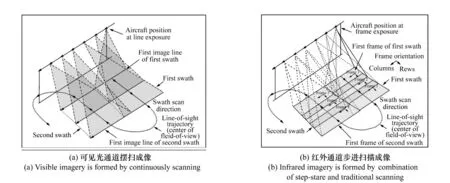
图6 DB-110 获取大范围覆盖图的方式Fig.6 Method of capturing a large area converage image by DB-110
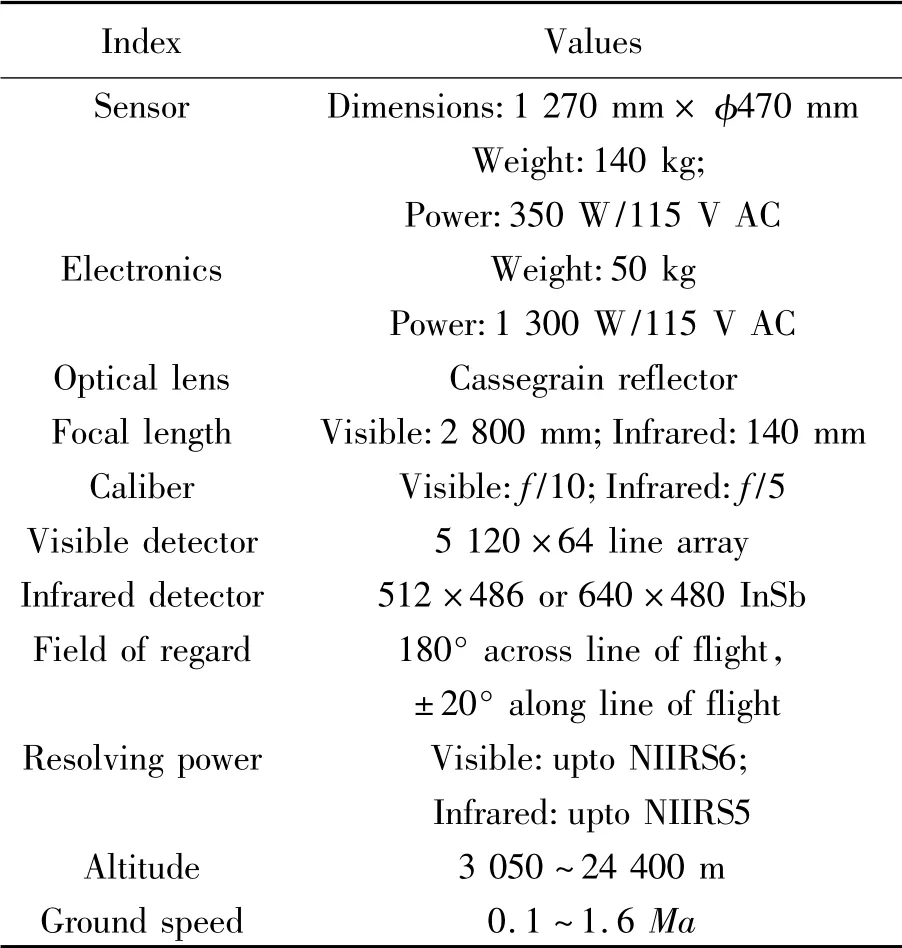
表2 DB-110 的典型参数Tab.2 Parameters of DB-110
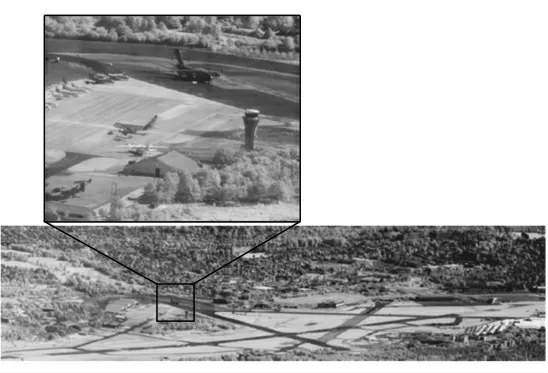
图7 DB-110 拍摄的可见光图像Fig.7 Visible image shot by DB-110
由于DB-110 平台的中波红外通道使用步进扫描模式成像,可以将该通道改造成支持短波红外( SWIR) 、中波红外( MWIR) 或长波红外( LWIR) 的成像光谱仪。Goodrich 公司已经验证了DB-110 的稳定精度可以满足在实现LWIR 光谱仪成像的同时,获得高分辨力的可见光图像。开展超光谱仪的设计表明已经可以在DB-110 内部实现焦距为96.5 cm( 38 in) 的超光谱仪和280 cm(110 in) 的可见光成像。
3 关键技术分析
3.1 共形光学系统设计
随着雷达技术、精确制导武器等军事对抗技术的发展,飞行器的隐身设计和空气动力学设计越来越受重视,其发展趋势是采用整机结构设计实现有效的隐身,从而对光学系统提出了共形设计的要求。设计时多采用特殊表面取代传统的平板或球形窗口,以减少飞行器的空气阻力和雷达波的反射。图8 所示F-35 的EOTS 光学窗口为共形设计的典型代表。EOTS 窗口由7 块表面镀膜的蓝宝石玻璃组成,可提供360°全向视野。这种窗口满足了结构共形的要求,但同时产生了动态像差。
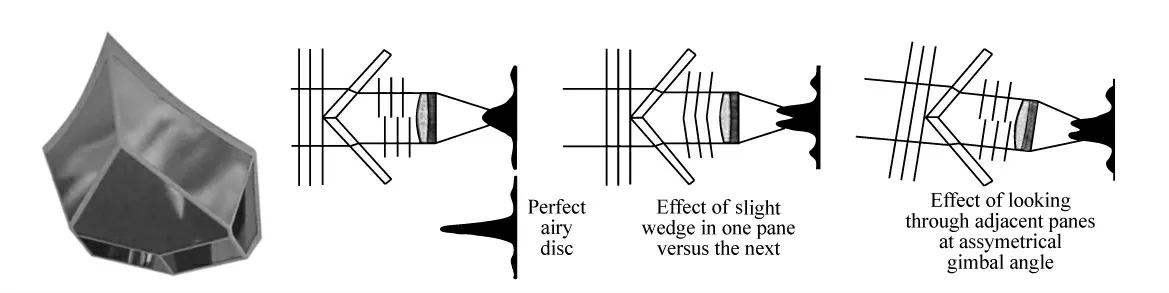
图8 EOTS 的共形光学窗口及其动态像差示意图Fig.8 Conformal optical window of EOTS and the dynamic aberration of slight wedge
当光学系统通过不同角度的窗口块之间的接合面成像时,会出现以下问题:
(1) 光程( OPL) 会随瞄准角变化而变化;
(2) 在块之间会有不同的光程差( OPD) ,使得分割波面产生一定位相差;
(3) 窗口的透射率可能因入射角变化而变化。
上述问题直接制约着设备的成像质量,为满足高速载机应用需求,应尽快解决如下难题:
(1) 实现透过不连续窗口分段波前的共相位校正;
(2) 窗口平板的拼接;
(3) 抑制拼接窗口内部的杂散光;
(4) 消除平板拼接处高速飞行与空气磨擦产生的热梯度;
(5) 高超音速高速飞行后的自适应光学。
3.2 高/超光谱成像技术
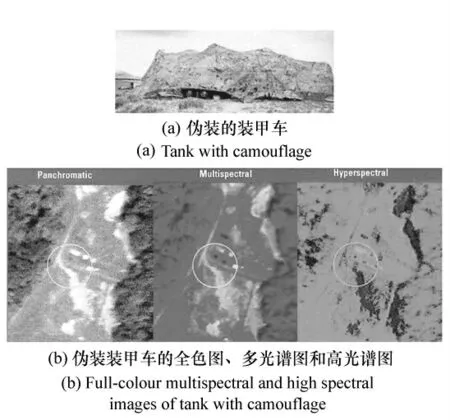
图9 采用光谱谱段识别伪装目标的示意图Fig.9 Demonstration of recognizing camouflaged target with spectral technique
在现代化战争中,伪装能隐蔽军队作战行动,迷惑和欺骗敌人,提高战场生存能力,因而备受各国军队的青睐。近年来,一些军事强国为研制、开发和生产伪装器材,投入大量人力、物力和财力,并注重吸收和运用新技术、新材料、新工艺,从而大大促进了伪装器材的发展,提高了战术性能,加快了作业速度,增强了隐真示假的效果。因此,在现代高技术战争中,如何识别伪装、假目标已经是军事侦察领域一个重要的研究和应用方向。高光谱成像侦察技术最突出的特点是能从自然背景中发现人工材料制作的伪装器材和材料,揭示严密伪装的军事目标,并判定出军事目标的性质。图9 为典型高光谱相机识别伪装的图像。在场地上放置了一辆伪装的装甲车辆,采用全色和多光谱图像难于识别,而将高光谱图像不同通道赋予不同RGB 值后,从图像中Red: 3.73 μm,Green:2.12 μm;Blue:1.27 μm 就可以清晰地发现伪装目标。随着高光谱技术和数据融合系统的不断发展,通过分析、处理所获得高光谱数据,参照地物波谱数据库,就能够识别出目标的表面物质,进而识别出伪装器材、伪装目标,这对军事目标特别是固定目标的识别具有重要的战略和战术意义。
高/超光谱成像技术的成功应用需要解决下列关键技术问题:
(1) 高精度分光技术;
(2) 共口径成像技术;
(3) 高精度数据反演与定标技术。
其中高精度数据反演和定标技术严重依赖于目标光谱数据库。目前,国内尚无专业机构开展此项工作,有必要尽快开展此类研究,以便更好地发挥光谱成像的功能。
3.3 高精度稳定与像移补偿技术
随着精确打击技术的发展,对侦察图像的清晰度、目标定位精度的要求不断提高,而图像清晰度的提高取决于伺服稳定控制技术和像移补偿技术的进步。目前,国外先进光电载荷的稳定精度已经达到2 ~5 μrad,国内光电载荷的稳定精度与之相差约一个数量级。采用传统的机电框架控制技术实现此指标已经难以为继,引入图10 所示的快速反射镜( FSM) 稳定技术[23]是解决这一难题的必要条件。
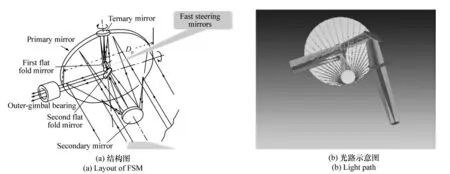
图10 FSM 稳定结构及光路示意图Fig.10 Schematic diagram layout of FSM stabilization and its light path
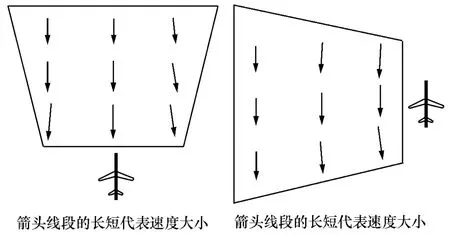
图11 载机前倾和侧倾成像时的像移示意图Fig.11 Image motions due to aircraft forward motion varied with camera orientation( Forward oblique and side oblique)
当载机以大速高比运动时,会在探测器的积分时间内带来像元模糊,图11显示了载机前倾、侧倾时的像移,由于像移直接导致图像模糊,像移补偿的优劣直接关系到图像分辨力。
为了保证图像分辨力,有必要开展如下课题研究:
(1) 系统的高精度稳定控制技术;
(2) 多光谱共光路设计;
(3) 像移补偿技术。
3.4 图像处理技术
随着光电任务载荷向全天候、多光谱、多模式探测系统的发展,光电设备的图像处理技术也从单一的目标捕获、跟踪功能,向智能化、多模融合、定量分析等方向发展,从而使输出图像更清晰、目标捕获跟踪更便捷、目标定位更精确。图像融合是当前研究热点之一,多种光电传感器之间的互补性和冗余性可以解决单一成像传感器的信息不全面或不准确的问题。图3 的MTS 吊舱输出图像充分表明:融合输出的图像有效发挥了两个谱段的优点,便于操作手更好地发现、识别目标。另外利用多重信息间的互补性扩大系统感知时空的覆盖范围,也是军事侦察、识别伪装,实现光电对抗的重要手段。
图像传感器像元数的不断提高及谱段的不断拓展,使得图像处理器的运算量急剧增大,激光雷达或高/超光谱仪成像目标识别过程已经面临这一问题,而实现并行运算是解决此瓶颈的有效选择。有研究表明,随着图形处理芯片的技术突破,基于GPU 实现嵌入式高速并行处理运算已有可能,基于GPU 或CUDA 架构实现高性能并行运算将成为未来高性能计算的基础。图12 显示了近年来GPU 性能的飞速增长[24]。
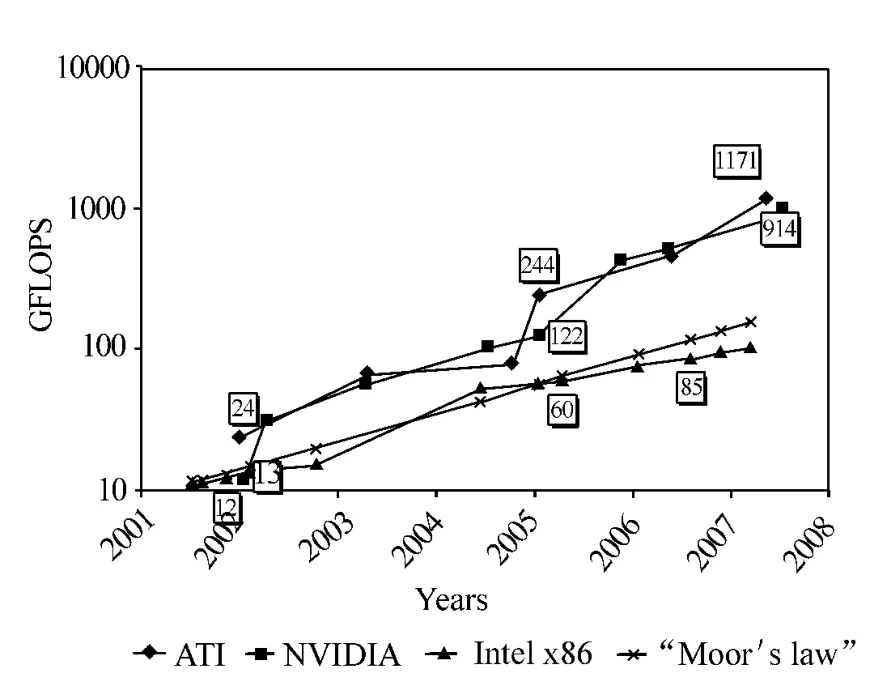
图12 CPU 和GPU 的运算性能增长曲线Fig.12 Curves of CPU/GPU capacity growth
与光电态势感知设备相关的图像处理关键技术包括: 超分辨力技术、图像融合技术、图像去模糊技术以及ATA/ATR 技术。
3.5 激光3D 成像技术
长期以来,激光器在光电设备中仅作为距离测量、指示设备使用,实际上激光器的回波信息除了距离信息以外,还有回波强度、角距信息可以利用,一旦获取原始的方位角-俯仰角-距离,距离-速度-强度等数据后即可以图像的形式显示,从而获得辐射几何分布图像、距离选通图像、速度图像等[25]。
自1996 年美国提出“激光雷达焦平面阵列”( LR-FPA) 的3D 成像激光雷达概念以来,非扫描3D 成像激光雷达成为激光雷达研究的热点,在国防部高级研究计划局的支持下,麻省理工学院林肯实验室、雷神公司和洛克希德·马丁公司等先后开展了雪崩光电二极管( APD) 焦平面阵列组件、泛光照明激光器和非扫描3D 成像激光雷达原理试验系统的研制,突破了中等尺寸的APD 焦平面阵列组件和泛光照明激光器等关键器件技术,研制出多个原理试验系统,并进行了飞行试验。试验结果证明,非扫描3D 成像激光雷达对地面伪装目标和树林中隐蔽目标具有良好的探测、识别能力和各种空中机动平台的适装性,标志着非扫描3D 成像激光雷达已取得体制性突破[25-29]。图13 是美国林肯实验室获取的试验数据,该图像序列是对伪彩编码后的高度图用色彩压缩实现遮盖物去除后的效果。这个图像序列显示了通过选择连续压缩色彩条实现3D 数据层切后的效果,左上角第1 幅图像显示了树冠出的场景,第4 幅显示了树冠下的3D 场景,从第4 幅图像可以清晰地看到树干、坦克。
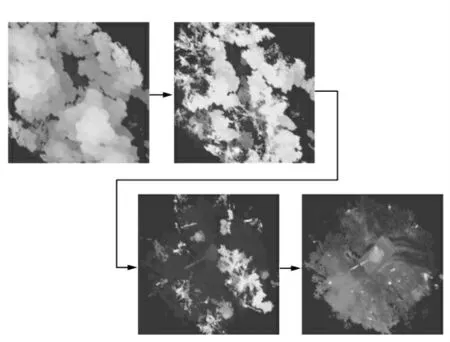
图13 对3D 激光雷达数据作层切显示后的二维图像数据( 树冠至地面目标)Fig. 13 Sequences of 3D images with color-coded height and canopy removal via color-bar compression( From the tree tops to the 3D scene below tree canopy)
实现激光3D 成像技术需要解决下列关键技术:
(1) 高重频、窄( 微) 脉冲的激光器主动照明技术;
(2) 外同步、极小抖动距离选通技术;
(3) 高灵敏探测技术: 光子计数探测、外差探测、多普勒速率探测技术;
(4) 点云数据重构技术。
4 结束语
机载光电态势感知领域是一个涉及光、机、电、软件的多学科领域,技术创新非常活跃,新的传感器组合、新的技术应用不断涌现。受篇幅限制本文未对告警/预警、激光通讯等领域做阐述。
看得远、分得清、测得准、隐形/反隐形、智能化、网络化等发展方向,是光电态势感知设备的永恒追求。作者认为,国内光电跟踪技术的开展应在跟踪国外先进技术的同时,进一步在探测成像机制、数据通信机制上做出创新性探索,实现跨越式发展。
[1] 吴东法.无人机载侦察雷达系统发展浅析[EB/OL].(2005-08-04) [2011-07-11]http: //www.defence.org.cn/article-13-31535.html.
[2] 刘洵,王国华,毛大鹏,等.军用飞机光电平台的研发趋势与技术剖析[J].中国光学与应用光学,2009,2( 4) :269-288.LIU X,WANG G H,MAO D P,et al.. Developing trend and technological analysis of warplane optoelectronic platforms[J].Chinese J. Opt. Appl. Opt.,2009,2(4) :269-288.( in Chinese)
[3] 尚玉全,曾云,腾涛,等.CMOS 图像传感器及其研究[J].半导体技术,2004,29(8) :19-24.SHANG Y Q,ZENG Y,TENG T,et al.. CMOS image sensor and its research[J].Semiconductor Technology,2004,29(8) :19-24.( in Chinese)
[4] PETRIE G,WALKER A S. Airborne digital imaging technology:a new overview[J].The Photogrammetric Record,2007,22(119) :203-225.
[5] GORIN B A. Slide oblique real-time orthophotography with the 9k×9k digital framing camera[J].SPIE,2003,5109:86-97.
[6] MATHEWS B. An ultra high resolution,electro-optical framing camera for reconnaissance and other applications using a 9216 by 9216 pixel,wafer scale,focal plane array[J].SPIE,1998,3431:144-154.
[7] AMRAeS M J G. Raytheon AN/AAS-52 Multispectral Targeting System A( MTS-A) [G]. Jane's Electro-Optic Systems 2008-2009.14th ed. Virginia:Jame's Information Group Inc.,2008-2009:636-637.
[8] AMRAeS M J G. Raytheon AN/DAS-1 Multispectral Targeting System B( MTS-B) [G]. Jane's Electro-Optic Systems 2008-2009.14th ed. Virginia:Jame's Information Group Inc.,2008-2009:637-638.
[9] DALY M. GA-ASI MQ-1B and RQ-1A Predator[G]. Jame's Unmanned Aerial Vehicles and Targets ISSUE31-2008.Virginia:Jane's Information Group Inc.,2008:273-277.
[10] DALY M. GA-ASI MQ-9B Reaper,Predator B and Mariner[G]. Jame's Unmanned Aerial Vehicles and Targets ISSUE31-2008.Virginia:Jane's Information Group Inc.,2008:278-282.
[11] AMRAeS M J G. Lockheed martin F-35 Electro-Optical Targeting System( EOTS) [G]. Jane's Electro-Optic Systems 2008-2009.14th ed. Virginia:Jame's Information Group Inc.,2008-2009:522-523.
[12] AMRAeS M J G. Goodrich DB-110 dual-band reconnaissance system[G]. Jane's Electro-Optic Systems 2008-2009.14th ed. Virginia:Jame's Information Group Inc.,2008-2009:578-579.
[13] IYENGAR M,LANGE D. The Goodrich 3rd generation DB-110 system: operational on tactical and unmanned aircraft[J].SPIE,2006,6209:620909.
[14] LANGE D,IYENHAR M,MAVER L,et al.. The Goodrich 3rd generation DB-110 system:successful flight test on the F-16 aircraft[J].SPIE,2006,6546:654607.
[15] LENGE D,ALBRAMS W,IYENGAR M,et al.. The Goodrich DB-110 system:multi-band operation today and tomorrow[J].SPIE,2003,5109:22-36.
[16] BEUVILLE E,ACTON D,CORRALES E,et al.. High performance large infrared and visible astronomy arrays for low background applications: instruments performance data and future developments at raytheon[J].SPIE,2007,6660:6660CB.
[17] KING D F,GRAHAM J S,KENNEDY A M,et al.. 3rd-generation MW/LWIR sensor engine for advanced tactical systems[J].SPIE,2008,6940:69402R.
[18] GAULFIELD J,FLETCHER C L,GRAHAM R W,et al.. Advanced IRFPAs for next generation sensors[J].SPIE,2004,5406:178-183.
[19] FISCHER R E,SIEGEL L R,KORNISKI R J,et al.. New developments in optical correction for non-spherical windows and domes[J].SPIE,1994,2286:471-479.
[20] MANOLAKIS D,MARDEN D,SHAW G A. Hyperspectral image processing for automatic target detection applications[J].Lincoln Lab. J.,2003,14(1) :79-116.
[21] LARROQUE S. Stabilisation for image quality[J].SPIE,2002,4824:66-71.
[22] MASTER M K. Inertially stabilized platforms for optical imaging systems[J].IEEE Contr. Syst. Mag.,2008,28(1) :47-64.
[23] COOK L G. Pointable optical system with cude optics having a short on-gimbal path lengt: US,20090237784[P]. 2009-09-24.
[24] OWENS J. GPUs:Engines for future high performance computing[EB/OL]. ( 2004-11-30) [2011-07-11]http: //www.ece.ucdavis.edu/ ~jowens/talks.owens-hpec04-gpgpu.pdf.
[25] 杨培根. 国外激光雷达的发展[EB/OL]. ( 2008-06-19) [2011-07-11]http: //www. defence. org. cn/article-1-43656.html.
[26] 倪树新.新体制成像激光雷达发展评述[J].激光与红外,2006( S1) :732-736.NI SH X. Review on development of the new imaging laser radar systems[J].Laser&Infrared,2006( S1) :732-736.( in Chinese)
[27] GSCHWENDTNER A B,KEICHER W E. Development of coherent laser radar at Lincoln Laboratory[J].Lincoln Lab.J.,2000,12(2) :383-396.
[28] MARINO R M,DAVIS W R,JIGSAW J. A foliage-penetrating 3D imaging laser radar system[J].Lincoln Lab. J.,2005,15(1) :23-36.
[29] CHO P,ANDERSON H,HATCH R,et al.. Real-time 3D ladar imaging[J].Lincoln Lab. J.,2006,16(1) :147-164.
猜你喜欢
中国新技术新产品(2023年1期)2023-04-07 02:25:26
北京测绘(2022年5期)2022-11-22 06:57:43
科学大观园(2022年14期)2022-07-17 03:54:41
汽车观察(2021年8期)2021-09-01 10:12:41
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
中国交通信息化(2019年1期)2019-03-26 06:43:46
小学科学(2019年12期)2019-01-06 03:38:45
电子制作(2018年16期)2018-09-26 03:27:00
航空模型(2016年10期)2017-05-09 06:30:58