
三线阵CCD 立体测绘相机的集成装调
2012-10-30 08:48苗健宇张立平
中国光学 2012年4期
苗健宇,张立平 ,翟 岩,梅 贵
(中国科学院 长春光学精密机械与物理研究所,吉林 长春130033)
1 引 言
就空间对地观测而言,通常的光学成像是利用各种不同的成像机理将地球或其它行星凹凸不平的三维表面转换成二维平面影像。人们可以利用这些影像获取大量的二维几何信息和其它信息,但无法从单幅的二维影像中提取出被摄物体完整的三维空间信息。为此,早在19 世纪中叶,从事测量物体或地球表面三维几何形状以及点位坐标的测绘学家们就提出了立体摄影测量的方法。该方法利用适合于摄影测量用的光学相机从一条“基线”的两个端点摄取某一物体的两张像片,从这两张相片向每个要确定的点引出方向线,这样每对方向线相交就会以点的形式表达出所摄的整个物体表面的三维形状,即可以通过从不同位置摄取的同一物体的两张相片来提取被摄物体表面的三维几何信息。这与人类通过双眼才能真正感受到物体远近的道理是相同的[1-3]。
测绘卫星的任务是要精确地确定目标的地理位置,即目标的三维坐标,这就决定了测绘卫星不仅要具有必要的分辨率,而且要具有相应的几何精度。此外,为了测图的需要,测绘卫星摄取的两幅构成立体像对的图像在一个方向上必须有一定的重叠;拍摄这两幅重叠图像时卫星必须相距一定的距离;一般情况下,测绘卫星摄取的图像在另一个方向上也应该足够宽,有一定的交叠。为了满足上述要求,高精度测绘卫星的有效载荷应该具有较小的几何畸变、较高的几何稳定性以及较宽的视场[4-5]。
考虑测绘相机对几何精度的要求,本文以测绘相机组合体为研究对象,探讨了多相机集成装调的方法。重点探究了测绘相机的装调技术,建立了单相机测量坐标系与相机外部基准立方镜坐标系的关系,以及各相机间测量坐标系的转换关系。
2 测绘相机简介
研制的测绘相机组合体的结构如图1 所示,正视相机、前视相机和后视相机互成角度装入测绘基座安装孔内,多光谱相机安装在测绘基座正视相机底部的安装腔内,3 个星敏感器分别安装在星敏支架顶部斜面上,通过星敏支架安装到测绘基座顶部,共计7 台独立的光学载荷构建了测绘相机组合体。测绘相机是正视相机、前视相机和后视相机的统称,其连续推扫的影像可以构成立体测量模型,卫星因有其搭载方可称为测绘卫星;多光谱相机连续推扫获取的影像信息可以进行地物属性判读;3 个星敏感器用来测量和确定卫星的外方位元素[6-7]。

图1 测绘相机组合体Fig.1 Whole structure diagram of mapping camera
由测绘原理可知,为确定测绘相机在轨工作时相机在地球惯性坐标系中的姿态,应获得如下参数:(1) 卫星在轨工作时通过星敏感器测量获取星敏感器测量坐标系在惯性坐标系中的姿态;(2) 由星敏感器研制方标定星敏感器测量坐标系与星敏外部基准立方镜坐标系的转换矩阵1;(3)由相机研制方标定星敏感器外部基准立方镜坐标系与测绘相机外部基准立方镜坐标系的转换矩阵2;(4) 由相机研制方标定测绘相机测量坐标系与测绘相机外部基准立方镜坐标的转换矩阵。用户根据上述数据通过转换获得测绘相机在轨工作时的姿态参数[8-9]。
测绘相机测量坐标系的定义如图2 所示,+Z轴为相机视轴方向,+Y轴为相机线阵CCD方向,X和Y、Z轴构成右手坐标系; 相机基准立方镜坐标系的原点在基准立方镜的结构中心上,X、Y和Z三轴与单相机测量坐标系的X、Y和Z三轴平行。单相机测量坐标系与自身基准立方镜坐标系间的相对几何关系用图中的α、β 和γ 角描述;前视相机、后视相机测量坐标系与正视相机测量坐标系之间的几何关系也用α、β、γ 角表示。

图2 单相机测量坐标系定义Fig.2 Measuring reference frame of mapping camera
测绘基座基准立方镜为多相机装调的原始基准,其坐标系的原点在基准立方镜的结构中心,X、Y和Z三轴与与正视相机测量坐标系的X、Y和Z三轴平行。
3 测绘相机装调要求
3.1 基准立方镜装调要求
(1) 测绘基座基准立方镜装调要求
测绘基座为各单相机的主支撑结构,其-X面,即底面为测绘相机组合体与卫星平台的直接接触面,也是测绘基座的加工基准面,面形精度为0.003 mm,测绘基座-Y面和+Z面为测绘基座另外两个加工基准面,与-X面的垂直度在0.005 mm 以内。
测绘基座基准立方镜安装在测绘基座的+X面上,基准立方镜+Z轴和-Y轴与测绘基座-X面平行,即+Z面和-Y面垂直,控制在3″以内。
(2) 正视相机基准立方镜装调要求
①正视相机基准立方镜+Z轴、正视相机镜头光轴和测绘基座基准立方镜+Z轴三轴平行控制在5″以内;
②正视相机基准立方镜-Y轴与测绘基座基准立方镜-Y轴平行控制在10″以内。
(3) 前视相机基准立方镜装调要求
①前视相机基准立方镜+Z轴、前视相机镜头光轴和测绘基座基准立方镜+Z轴三轴平行控制在5″以内;
②前视相机基准立方镜-Y轴与测绘基座基准立方镜-Y轴平行控制在10″以内。
(4) 后视相机基准立方镜装调要求
后视相机基准立方镜装调要求同前视相机基准立方镜装调要求。
3.2 相机装调要求
测绘相机由3 台独立的相机互成角度构成,相机间空间几何关系的精确性对测绘精度的影响很大,因此在相机的研制过程中必须保证相机间几何关系的精确性。测绘相机间的空间几何关系以正视相机测量坐标系为基准进行表示,各相机的装调要求见表1。

表1 相机间几何关系装调要求Table 1 Assembly and adjustment requirements of geometric relation among cameras
α 为前视、后视、多光谱相机视轴Z在正视相机测量坐标系YOZ面内投影与正视相机视轴Z的夹角;β 为前视、后视、多光谱相机视轴Z在正视相机测量坐标系XOZ面内投影与正视相机视轴Z的夹角;γ 为前视、后视、多光谱相机CCD 线阵方向在正视相机测量坐标系XOY面内投影与正视相机CCD 线阵方向的夹角。
4 测绘相机装调方法
三线阵CCD 立体测绘相机装调精度要求高,装调过程复杂,装调设备的精度及装调环境对装调结果影响较大,因此购买和制造高精度的装调设备和建立环境稳定的实验室是非常必要的。装调设备由300 和1 000 mm 直径标准平面反射镜、0.5″经纬仪、0.5″二维转台、750 mm 口径自准直平行光管、自准直目镜、摄像机、监视器、隔振地基和光源等组成; 建立恒温( 温度范围(18 ±2) ℃,4 h 温度变化<0.5 ℃) 、超净(10 万级超净间) 的实验室。
4.1 装调流程
三线阵CCD 立体测绘相机装调流程如图3所示。星敏感器为购买的成熟产品,自身的测量坐标与外部基准立方镜坐标系间的转换矩阵由厂家提供,但其外部基准立方镜与测绘相机间的几何关系需要通过装调保证,通过精密研磨星敏支架上各星敏感器安装面间的空间位置关系可保证此几何关系;多光谱相机中光机电热各部分产品统一装调后,再装入测绘基座。由于对多光谱相机与正视相机之间的几何关系要求较低,调整与测绘基座之间垫片的厚度,通过光学测量方法即可保证。
光谱相机装调成完整相机后再装入测绘基座不同,测绘相机装调精度要求高,采取镜头装调完毕后,以测绘基座基准立方镜为基准,装入测绘基座,进入装调相机基准立方镜和像面的装调流程,这是测绘相机装调的一大特色,打破了传统的单相机装配流程;3 台相机基准立方镜和像面统一装调,保证了相机间装调基准的统一,避免引入多次装配误差。
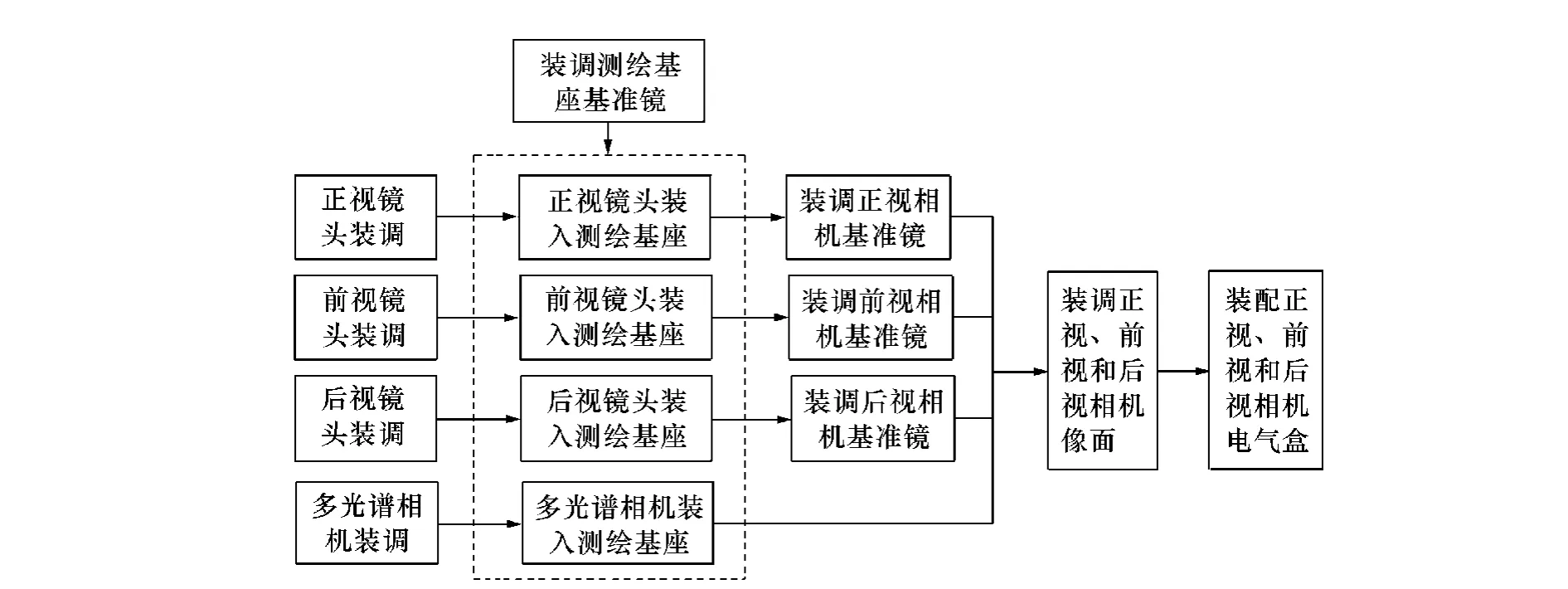
图3 测绘相机装调流程Fig.3 Alignment process of mapping camera
4.2 装调步骤
4.2.1 测绘相机镜头装调
测绘相机采用像方远心的亚对称光学系统[10],对镜头装调精度要求高,装调步骤分为各单透镜组独立装调和镜头总成装调。为保证单相机成像质量、测绘相机间的几何关系,以及后期装调方便,在测绘相机镜头装调完成后,须精密修研镜头结构前端面,通过光学定心仪检测,保证镜头光轴与镜头前端面( 在镜头前端面放置300 mm口径标准平面镜检测) 的同心精度,误差<3″; 精密研磨测绘相机CCD 像面组件安装凸耳,保证镜头光轴与CCD 像面组件安装面垂直,误差<3″。
4.2.2 测绘基座基准立方镜装调
(1) 测绘基座基准立方镜装调在大理石平台上进行,用0.2″数字水平仪将大理石平台调平至1″以内,并用0.2″数字水平仪随时监视大理石平台的水平变化情况;
(2) 用2 台0.5″莱卡数字经纬仪分别监视测绘基座基准立方镜的+Z轴和-Y轴的变化情况,通过精密研磨基准立方镜镜框底面直至满足要求;
(3) 安装螺钉拧紧,配打测绘基座基准立方镜镜框的安装销钉,完成测绘基座基准立方镜的装调。
4.2.3 测绘相机基准立方镜装调
(1) 将测绘基座装入具有绕Y轴翻转的工装上,正视相机镜头装入测绘基座安装孔内,紧固螺钉安装到位;
(2) 用2 台0.5″莱卡数字经纬仪分别监视测绘基座基准立方镜的+Z轴和-Y轴的变化,调整翻转工装,直至测绘基座基准立方镜的+Z轴和-Y轴达到上一步的安装精度;
(3) 在正视相机镜头前端面放置标准平面镜,将其反射像代表正视相机镜头的光轴,然后利用0.5″莱卡数字经纬仪监视镜头光轴、测绘基座基准立方镜+Z轴和正视相机基准立方镜的+Z轴的位置关系;
(4) 在翻转工装的-Y侧放置1 000 mm 直径标准平面反射镜,通过调整反射镜的位置,用0.5″莱卡数字经纬仪监视,将测绘基座基准立方镜-Y面的反射像与标准平面反射镜的反射像的位置调节重合,此时反射镜即可代表测绘基座基准立方镜-Y面;
(5) 通过1 000 mm 直径标准平面反射镜这一中间过渡基准,用0.5″莱卡数字经纬仪监视正视相机基准立方镜-Y轴的变化情况;
(6) 通过精密研磨正视相机基准立方镜镜框底部,直至满足精度要求为止;
(7) 安装螺钉拧紧,配打正视相机基准立方镜镜框安装销钉。
前视和后视相机基准立方镜的装调过程与正视相机基准立方镜的装调过程相同,不同点在于装调过程中需将翻转工装绕Y轴旋转+25°或-25°后再进行相机基准立方镜装调,也就是将前视相机或后视相机调成水平,方便装调。
4.2.4 测绘相机像面装调
首先,由高精度0.5″二维转台和大口径平行光管构建固定的坐标系,在装调过程中始终监测固定坐标系是否发生变化,如有变化,必须恢复到初始建立状态,再进行下一步操作; 其次,测绘相机组合体安装到0.5″二维转台上,通过调整转台位置分别将前、正、后视相机调整到可操作位置,在上一步建立的固定坐标系下将各像面组件安装到位;最后,反复检测各相机像面装调精度及相机间空间几何位置关系,重复检测结果一致即完成像面装调。三线阵CCD 测绘相机像面装调现场照片如图4 所示。
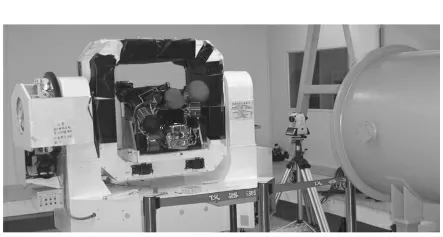
图4 测绘相机像面装调现场Fig.4 Photo of mapping camera alignment
测绘相机像面装调的前提是保证0.5″转台和大口径平行光管构建的固定坐标系在各像面装调时精度重合;难点是像面组件装调到安装凸耳上时过程繁琐,容易出现重复工作,且CCD 价格昂贵,容易对装调人员造成心理压力,不利于细致繁琐的工作开展; 重点是CCD 像面组件安装到位时,保证CCD 组件安装面与安装凸耳间充分接触,不存在虚点,否则很难保证CCD 像面组件安装精度的稳定性。
4.3 装调结果
测绘相机组合体装调结束后进行了消除装调应力工艺振动试验,经过精密测试和解算,得到了测绘相机中各基准立方镜的安装结果见表2; 测绘相机中各相机间几何标定结果见表3;另外,还对各相机进行了实验室静态光学传递函数和畸变测试,经解算,各相机的实验室静态光学传递函数均>0.22,满足航天相机实验室静态光学传递函数>0.2 的要求;各相机的畸变<0.03%,满足测绘精度的要求。
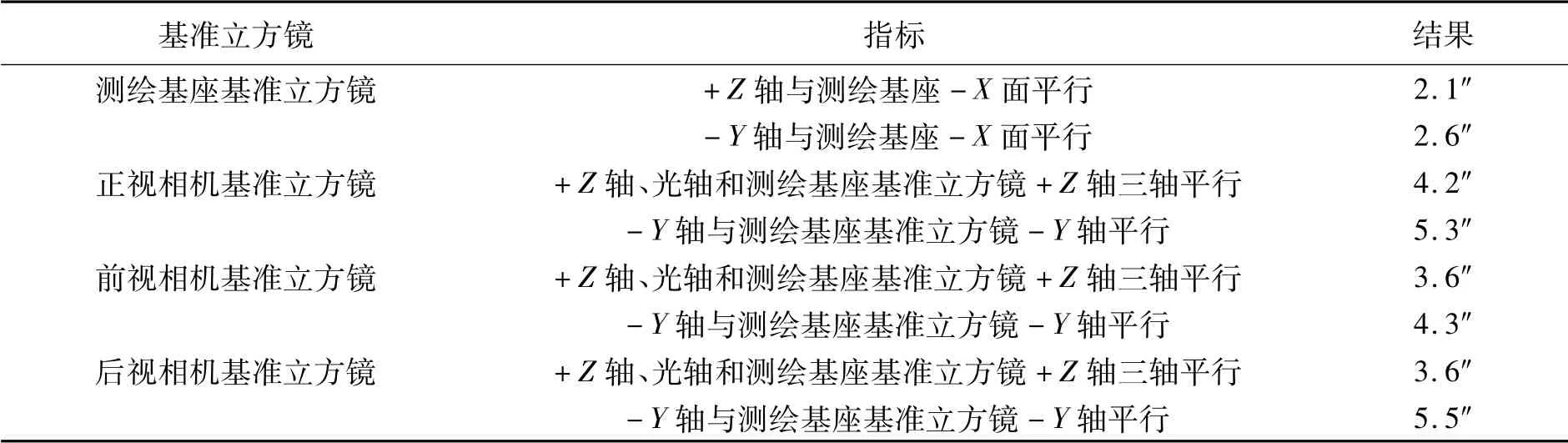
表2 基准立方镜安装结果Table 2 Alignment results of basal mirrors

表3 各相机间几何标定结果Table 3 Calibration results of geometricrelationships among cameras
4.4 结果分析
(1) 精密研磨镜头机械结构前端面,将镜头光轴转换到镜头结构的前端面上,转换误差<3″,有效地保证了前视、正视和后视相机间的光轴平行;
(2) 测绘相机中的3 台相机为组合体结构,装调中采取先将镜头装入测绘基座,再进行相机基准立方镜和相机像面装调,是保证测绘相机间几何关系的重要装调方法;
(3) 对于测绘相机中装调的各基准立方镜,其装调位置精度高,为合理地传递相机间的几何关系奠定了精度基础;
(4)0.5″二维转台及750 mm 口径自准直平行光管等设备构建的固定坐标系,对于保证测绘相机间空间几何关系是十分必要的。
5 结 论
三线阵CCD 立体测绘相机具有多相机集成装调成的一体结构,为了建立测绘相机中单相机自身测量坐标系与外部基准立方镜的关系,以及各相机测量坐标系间的几何关系,本文以测绘基座基准立方镜为装调基准,采取各相机镜头先装入测绘基座,再集中装调各相机的外部基准立方镜和像面的装调流程,并建立了由0.5″二维转台和大口径平行光管构成的固定的坐标系,为相机装调和标定提供固定的参考基准。通过对总体指标分解,制定了详细的基准立方镜和相机总成装调要求,装调结果表明:各相机的光学传递函数>0.2,畸变<0.03%,测绘相机间的空间几何关系满足α≤3″,β≤5″,γ≤5″的要求。
测绘相机的装调方法成功地保证了测绘相机间的几何要求,在实际的三线阵CCD 立体测绘相机装调过过程中得到了充分应用,此种方法对有几何精度要求的多台相机一体化装调有一定的参考价值。
[1] 王任享.三线阵CCD 影像卫星摄影测量原理[M].北京:测绘出版社,2006.WANG R X.Satellite Photogrammertric Principle for Three-line-array CCD Imagery[M]. Beijing:Sinomaps Press,2006.( in Chinese)
[2] 王任享.我国无地面控制点卫星摄影测量综述[J].海洋测绘,2008,28(5) :2-8.WANG R X. Mapping satellite without control point in China[J].Hydrographic Surveying and Charting,2008,28(5) :2-8.( in Chinese)
[3] 胡莘,曹喜滨.三线阵立体测绘卫星的测量精度分析[J].哈尔滨工业大学学报,2008,40(5) :695-699.HU X,CAO X B. Analysis on precision stereo mapping microsatellite using three-line CCD images[J].J. Harbin Institute Technology,2008,40(5) :695-699.( in Chinese)
[4] 王家骐.三线阵立体测绘技术及其应用( 译文集) [M].长春:中国科学院长春光学精密机械与物理研究所,2004.WANG J Q.Three Line Array Stereoscopic Mapping Technology and Application(translated text) [M]. Changchun:Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,2004.( in Chinese)
[5] 胡君,王栋,孙天宇.现代光学航天成像遥感器的应用与发展[J].中国光学与应用光学,2010,3(6) :519-533.HU J,WANG D,SUN T Y. Application and development of recent space optical imaging remote sensors[J].Chinese J.Opt. Appl. Opt.,2010,3(6) :519-533.( in Chinese)
[6] 苗健宇,张立平,吴国栋.三线阵CCD 立体测绘相机结构实现技术[J].仪器仪表学报,2011,32(10) :2183-2189.MIAO J Y,ZHANG L P,WU G D. Realizable technology of light-machine structure for three-line CCD tridimensional mapping camera[J].Chinese J. Scientific Instrument,2011,32(10) :2183-2189.( in Chinese)
[7] 苗健宇,张立平,吴清文.测绘相机光学镜筒设计、加工及装配[J].光学 精密工程,2008,16(9) :1648-1653.MIAO J Y,ZHANG L P,WU Q W. Design,manufacturing and assembly for optical lens of mapping camera[J].Opt.Precision Eng.,2008,16(9) :1648-1653.( in Chinese)
[8] 刘金国,李杰,郝志航.三线阵相机亚像元精度几何标定方法研究[J].光电工程,2004,31(1) :36-39.LIU J G,LI J,HAO ZH H. Study on a geometric calibration method for three-linear-array CCD camera with sub-pixel accuracy[J].Opt-Electronic Eng.,2004,31(1) :36-39.( in Chinese)
[9] 王智,张立平,李朝辉.传输型立体测绘相机的调焦机构设计[J].光学 精密工程,2009,17(5) :1051-1056.WANG ZH,ZHANG L P,LI ZH H. Design of focusing mechanism of space tridimensional mapping camera[J].Opt. Precision Eng.,2009,17(5) :1051-1056.( in Chinese)
[10] 田铁印,王红,谷凤安.三线阵立体测绘相机光学系统设计[J].光学 精密工程,2009,17(11) :2692-2698.TIAN T Y,WANG H,GU F A. Optical system design of three-linearray stereoscopic mapping camera[J].Opt. Precision Eng.,2009,17(11) :2692-2698.( in Chinese)
猜你喜欢
——黄咏梅小说论
扬子江评论(2022年6期)2022-08-15
防爆电机(2021年2期)2021-06-09
矿山测量(2020年3期)2020-07-15
化工设计(2020年6期)2020-01-13
模具制造(2019年7期)2019-09-25
汽车维修技师(2019年3期)2019-08-07
船舶标准化工程师(2019年4期)2019-07-24
劳动保护(2018年8期)2018-09-12
读者·校园版(2015年7期)2015-05-14
船海工程(2014年3期)2014-06-27
