贵冶KKK饱和蒸汽透平控制原理及编程组态
2012-10-29 03:05:40江春明
铜业工程 2012年6期
江春明
(江西铜业集团公司贵溪冶炼厂,江西 贵溪 335424)
1 引言
在贵溪冶炼厂三十万吨铜冶炼工程项目中,作为余热利用的重要环节,我厂引进了德国KKK公司的饱和蒸汽透平机组[1](2#透平),为实现高、低压蒸汽的平衡,达到余热利用的最大化,该机组采用的是所谓“一担挑”形式,即高压透平部分采用AFA4 G6a背压式透平,低压透平部分采用的是AFA6 G6b凝汽式透平,高、低压透平共用一个发电机。闪速炉、转炉余热锅炉产生的4.0MPa饱和蒸汽经高压透平吸收热能发电后降压至0.90MPa,与硫酸余热锅炉产生的1.0MPa饱和蒸汽混合后,再次进入低压透平发电,最后排入复水器回收冷凝水。发电机出线则通过并网装置、高压柜与2#动力中心高压母线相连,与二系统电网并网运行。具体工艺流程如图1。
2 2#透平控制原理及编程组态
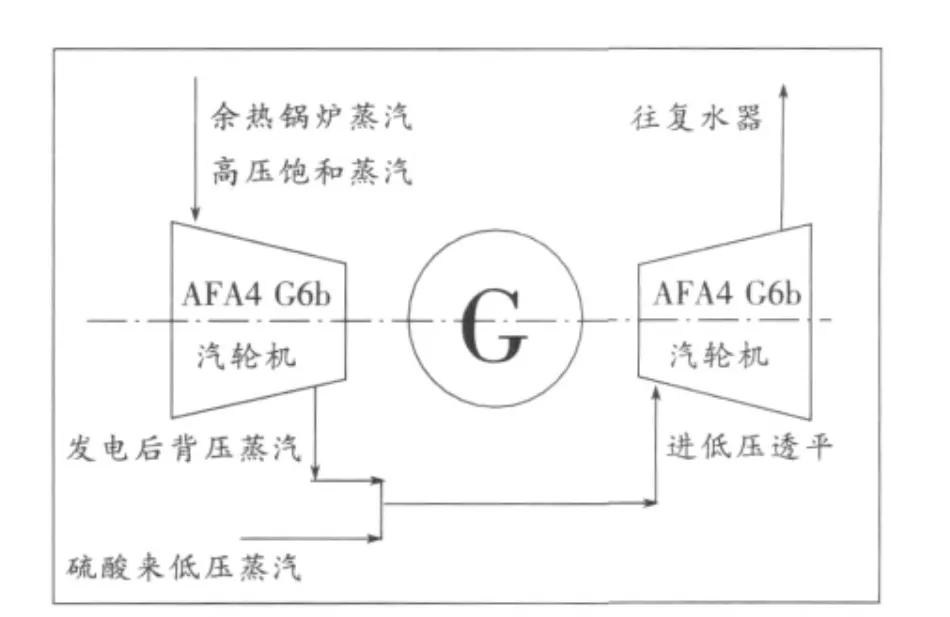
图1 2#透平机组基本工艺流程
我厂2#透平发电机组实际上相当于两台透平机组,高压透平部分采用的是“505”汽轮机控制器[2],低压透平部分采用的是SIPART DR22过程调节器。整个透平发电机组的开停机、高压蒸汽压力串级控制、发电机负荷控制等主要控制功能均由“505”控制器负责,而低压部分的DR22过程调节器作用仅相当于一个PID调节器,用于透平机组运行后根据低压蒸汽压力来调节低压透平主蒸汽阀门的开度,使低压蒸汽压力稳定在设定压力范围内。因此,在低压透平故障情况下,将低压透平与发电机的联轴器脱开后,高压透平机组部分可实现单独运行,但如果高压透平部分发生故障,低压透平机组不能单独运行。故本文仅着重介绍“505”控制器的控制过程。
“505”汽轮机控制器是美国WOODWARD公司研究开发的以微处理器为基础的汽轮机用数字式调节器[3],其配套产品还有 CPC(电液转换器)、DSLC(数字同步控制器)、LVDT(调节阀开度线性测量装置)等,可应用于单调节阀或双调节阀控制的汽轮机,我厂2#透平为单调节阀汽轮机,其控制模型如图2。
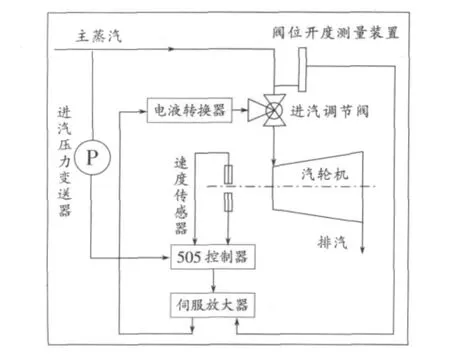
图2 2#透平控制模型
2.1 “505”控制器基本控制原理
“505”控制器内部有两个独立的控制通道,速度/负载PID和辅助控制器PID,还有一个不是PID调节器,是阀位限制器,如图3。
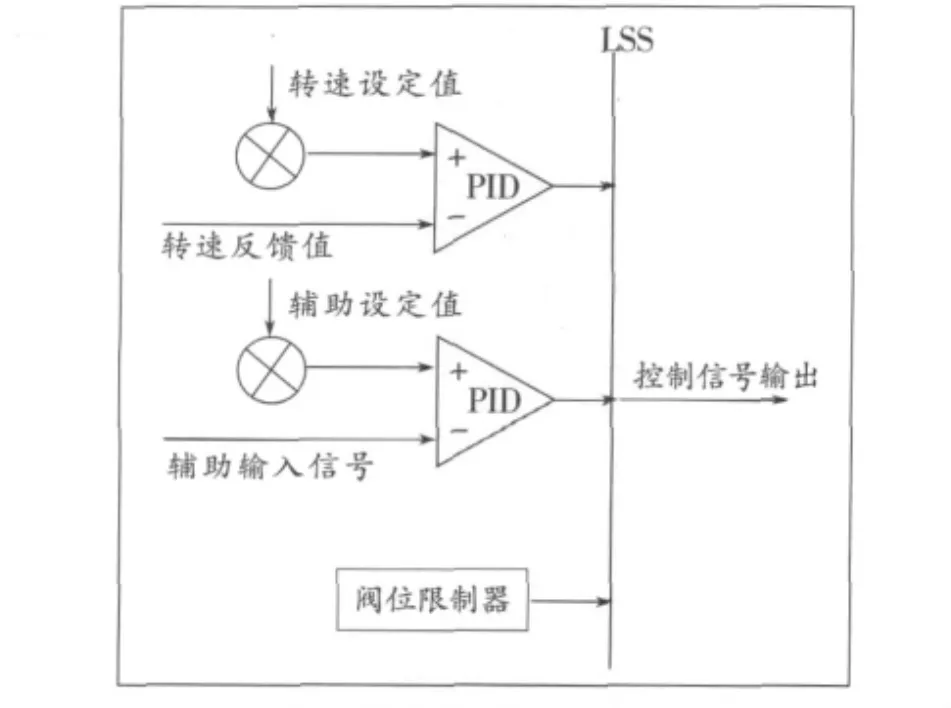
图3 “505”控制器基本功能逻辑图
从上图我们可以看出,调节阀实际开度指令受三个指令源控制,第一是转速调节器的输出,第二是辅助调节器的输出,第三是阀位限制器的输出。这三个输出信号不是叠加,而是通过一个低选总线 (LSS)选择哪一个最终作用到输出端。低选总线的作用是哪个控制模块给出的信号低,就用哪个信号,这就决定了汽轮机始终处于一个安全运行的模式,正常调节时不会过负荷,不会超速。除此之外,速度/负载控制器能通过其它控制器—串级控制器—进行操作。串级控制器被“级联”到速度控制器,从而速度控制器的设定值直接可以通过串级控制器的输出进行改变。辅助控制器能起一个控制通道作用或作为一个限制通道。所有这些PID控制器具有利用模拟输入信号进行远程定位其设定值的选项。此外,“505”控制器还具有频率控制,异步负载分享 (带一个DSLC),临界速度回避,空闲/额定控制以及自动启动顺序。同时“505”控制器具有两个串行通信端口,通过使用MODIBUS协议,这两个端口可用来监控和控制透平机。
2.2 2#透平实际控制过程
在2#透平实际运行过程中,“505”控制器在透平机处于不同运行阶段下主要有三种自动控制方式[4],即转速自动控制方式、串级自动控制方式、负荷辅助控制方式。下面就逐一进行分析:
(1)速度自动控制方式:即通常我们所说的调速运行方式,从透平开始启动冲转,一直到断路器合闸前均处于速度自动控制模式状态。在此控制状态下,“505”接收来自透平机的速度检测信号,速度PID控制放大器然后将该信号与速度设定相比较,产生一个输出信号给执行机构(通过一个低信号选择总线),从而维持透平在设定转速下运行。控制原理见图4。
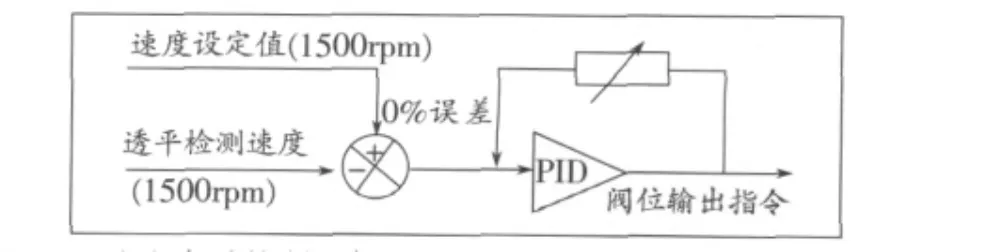
图4 速度自动控制逻辑图
(2)串级自动控制方式[5]:2#透平发电机是利用余热蒸汽进行发电的,为了不影响熔炼主工艺的生产,需要维持主蒸汽压力的稳定,因此透平在正常运行过程中,必须采用调压运行方式,即蒸汽量多时多发电,蒸汽量少时少发电,而主蒸汽压力基本保持不变。当发电机并网断路器合闸后,串级控制被激活,“505”控制器自动由速度控制方式切换为串级控制方式。串级控制也是一个PID调节器,可编程用于控制相关或受透平速度或负载影响的任何一个系统过程,通常配置用作透平入口或出口压力控制器,在我厂用作透平入口压力控制器。它与速度PID串级,将透平入口蒸汽压力变送器来的4~20mA的过程信号与串级设定值相比较 (前压控制),比较结果输出用于重新设定速度调节器的速度设定值,从而改变透平负荷直到透平入口主蒸汽压力与设定压力匹配为止。串级控制原理见图5。
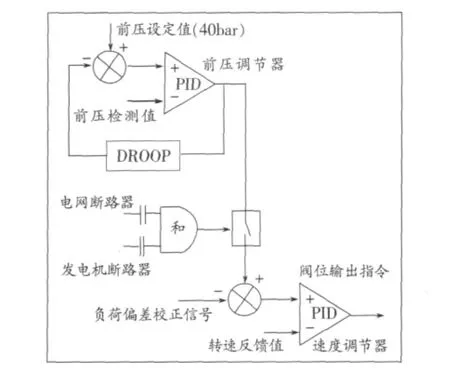
图5 串级自动控制逻辑图
(3)负荷辅助控制方式:“505”辅助控制通道能被用于控制一个参数或限制一个参数,通常用来控制或限制单元负载/电源、工厂进口/出口级别,进口压力,排气压力,温度或其它与透平负载直接相关的参数。辅助输入是4~20mA的电流信号,辅助PID控制放大器将该输入信号与设定值相比较,然后产生一个控制输出信号给数字LSS(低信号选择)总线。LSS总线将最低的信号发给执行器驱动电路。在此我们将发电机负荷作为辅助控制信号,以限制发电机功率,保证发电机始终工作在额定负荷下。当蒸汽量超出额定进汽量时,负荷辅助控制方式将使得发电机负荷稳定在额定负荷下,不会出现过载状况,此时主汽门开度被限定在一定位置,不再随着主蒸汽压力的变化而增大,当蒸汽压力超过透平蒸汽旁路设定压力时,由旁路管道进行泄压。负荷辅助控制原理见图6。
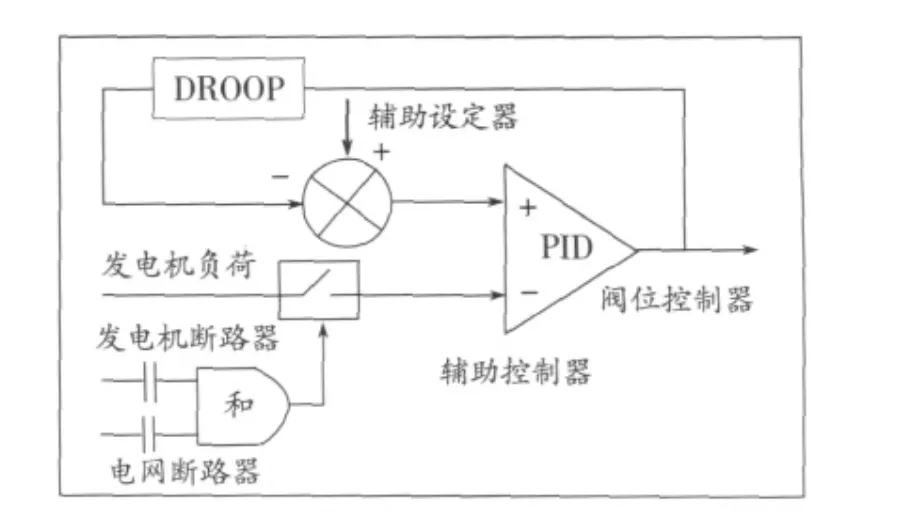
图6 负荷辅助控制逻辑图
(4)2#透平实际运行过程:当发出【启动准备】信号后,高、低压透平主截止阀同时打开,辅助油泵运行建立油压,PLC判断启动条件满足后发出“允许启动”信号,此时按【透平启动】按钮,“505”控制器发出透平主蒸汽阀开启信号,冲转透平,透平速度在“505”自动控制下由0rpm一直上升到1470rpm保持不变,然后按【并网启动】按钮,“505”接受同期并网装置发出的速度调节脉冲信号,控制透平速度逐步上升到1500rpm,实现发电机并网,此前整个透平处于调速运行状态。当断路器合闸后,“505”立即切换为串级自动控制模式,透平处于调压运行状态,透平进入正常运行,在整个透平正常运行过程中,负荷辅助控制模式一直工作,保证透平在额定负荷下安全运行。
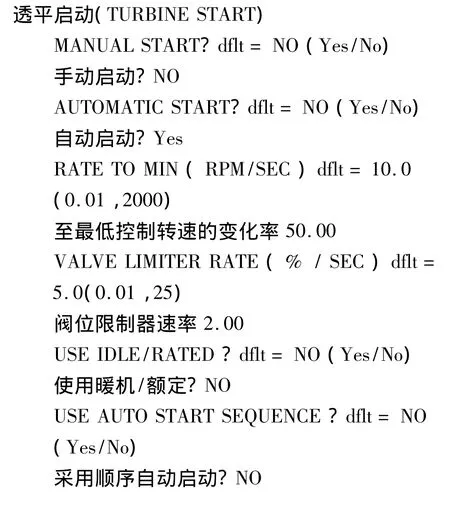
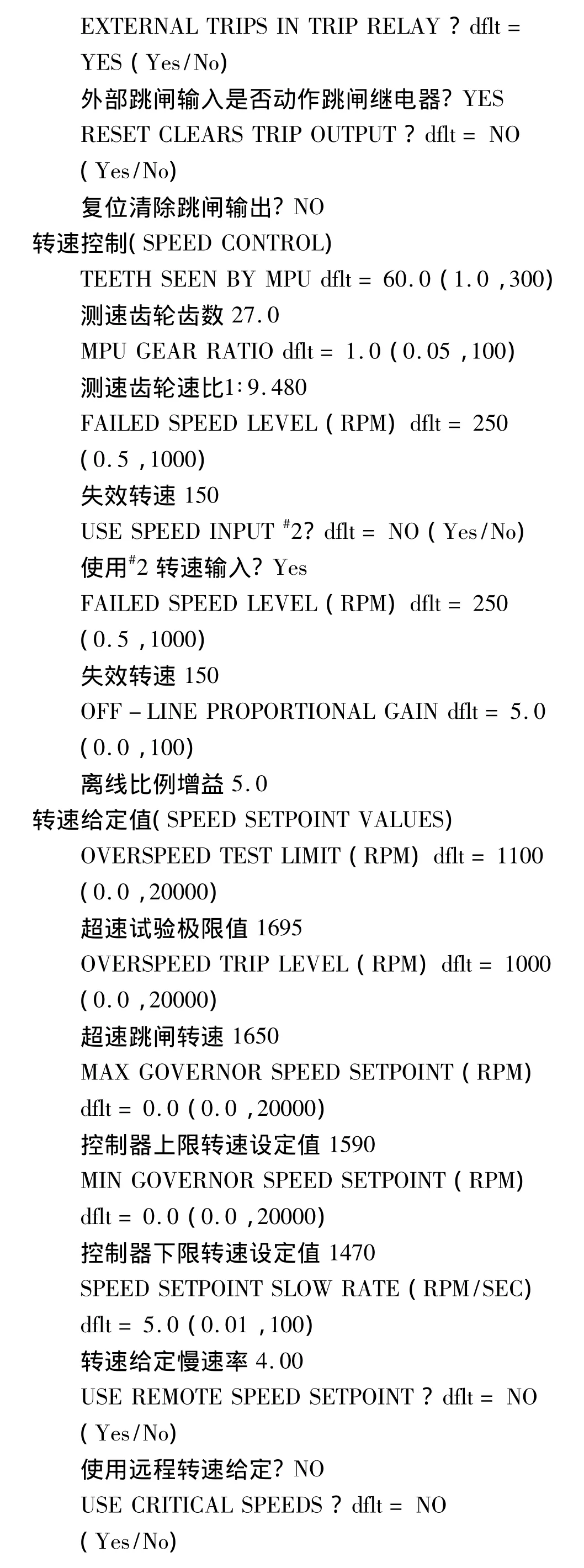
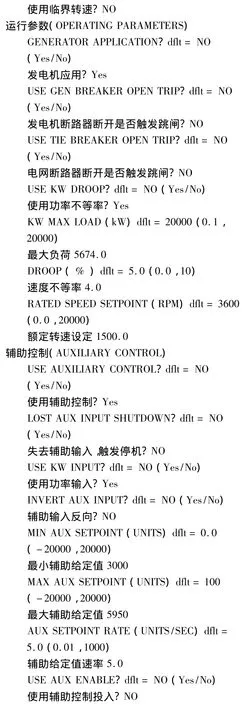
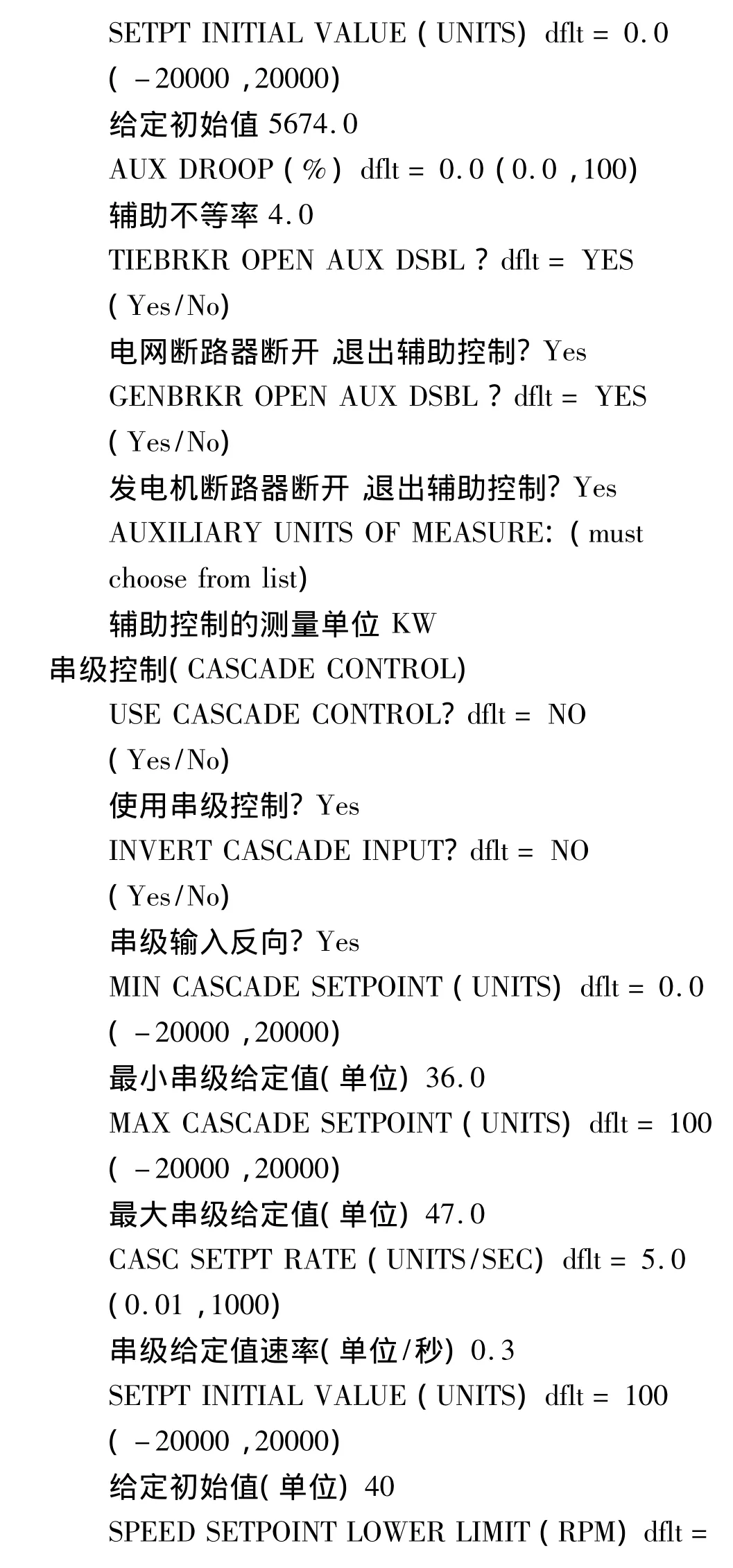
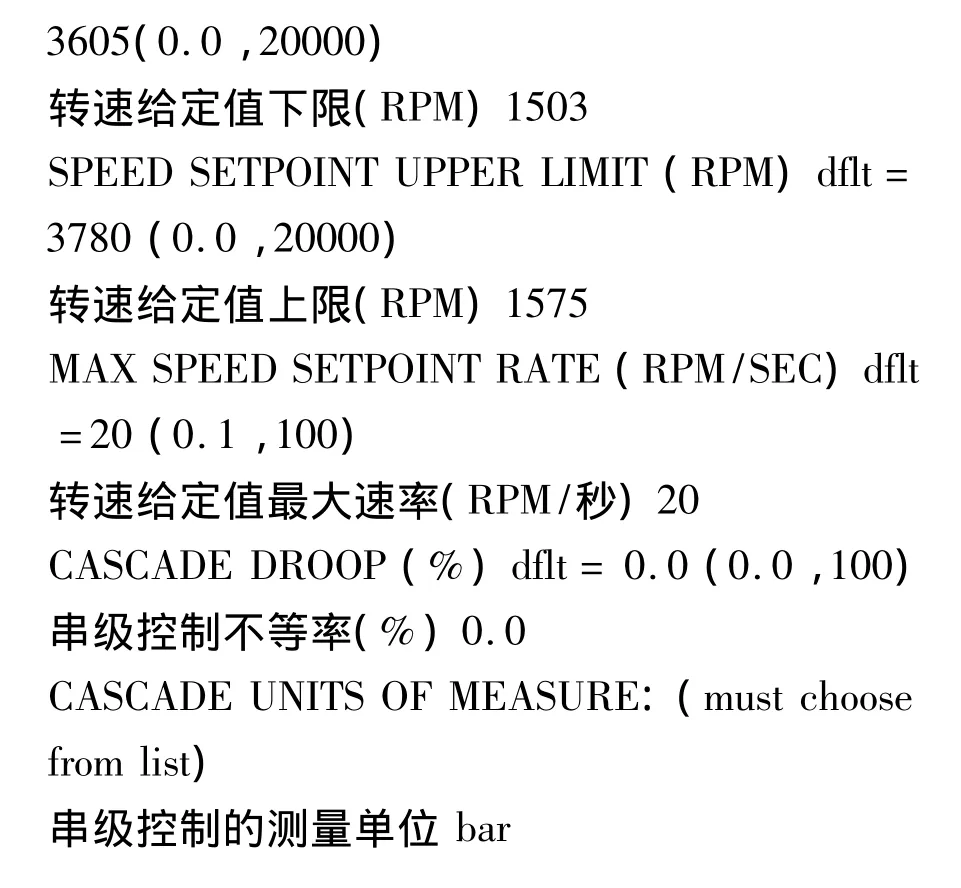
2.3 “505”控制器编程组态
为实现上述的控制功能,“505”控制器需要对其内部的服务方式功能块进行编程组态[6],主要功能组组态情况如下:
3 结语
随着饱和蒸汽透平发电机技术的不断成熟与完善,利用余热蒸汽发电也将被越来越多的工厂所采用,“505”汽轮机控制器的应用也将更加广泛,通过对“505”控制器功能和原理不断深入地摸索与了解,将使我们可以从容应对在透平运行过程中出现的任何问题。
[1]代云修.汽轮机设备及运行[M].北京:中国电力出版社,2005.
[2]蔡丹军.505E电子调速器透平控制系统的应用[J].乙烯工业,2004,16(3):44-47.
[3]肖增弘,徐丰.汽轮机数字式电液调节系统[M].北京:中国电力出版社,2003.
[4]陈渝光.电气自动控制原理与系统[M].2版.北京:机械工业出版社,2011.
[5]黄兆荣.浅谈汽轮机控制[J].化工设计通讯,2007,33(4):43-47.
[6]管旭.可编程控制器原理及应用[M].大连:大连理工大学出版社,2008.
猜你喜欢
装备制造技术(2021年4期)2021-08-05 07:39:12
能源工程(2020年5期)2021-01-04 01:29:00
冶金动力(2020年11期)2020-12-07 00:29:00
中国氯碱(2018年7期)2018-08-29 09:42:14
中国氯碱(2018年6期)2018-07-27 02:50:28
电子测试(2018年6期)2018-05-09 07:31:47
广西电力(2016年4期)2016-07-10 10:23:38
铁道通信信号(2016年12期)2016-06-01 12:11:58
海峡科技与产业(2016年3期)2016-05-17 04:32:11
工业设计(2016年4期)2016-05-04 04:00:23