
多功能智能车的论证与设计
2012-10-27 02:39:36高华磊迟雨杰张少飞裴文龙
中国科技信息 2012年11期
高华磊 迟雨杰 张少飞 裴文龙
中北大学,山西 太原 030051
多功能智能车的论证与设计
高华磊 迟雨杰 张少飞 裴文龙
中北大学,山西 太原 030051
以STC89C52单片机为智能小车的控制核心,采用红外收发管对跑道路线进行检测和识别,电机驱动采用L298驱动芯片, 驱动电机从而控制小车前进及转向,采用充电锂电池作为整个系统的供电电源。红外收发管通过电压比较器将检测信号送入单片机,单片机通过不同红外收发管的信号作出不同的判断,并控制电机完成小车前进、避障、转弯、超车等相应的动作,本车也加入了无线收发模块,可以通过遥控器,手动控制车辆行进等姿态,本设计线路简单,成本低。
单片机控制;红外收发管;无线收发模块电路;智能小车
MCU control;infrarterad nsmit-receitvue be;Wireless send-receive circuit;Intelligent car
引言
如今关于电子设计的比赛项目越来越多,很多比赛采用模型车去完成相应的比赛任务和要求,而由于竞赛的科技性加之娱乐性,引起了很多电子爱好者的情趣,尤其是在校大学生。因此,本文设计了一种多功能智能小车,可以良好的实现循迹、壁障、遥控、显示等功能,方便用户的二次开发和学习。
1 系统方案
本系统主要由单片机最小系统模块、直流电机驱动模块、红外光检测模块、无线收发模块、锂电池模块组成。
1.1 主控制器的论证与选择
方案一:采用FPGA控制方案。FPGA内部具有独立的I/O接口和逻辑单元,还具有速度快、外围电路较少和集成度高的特点,因此特别适用于复杂的逻辑电路设计。但是FPGA的成本高,而且由于本设计对输出的速度要求不高,所以FPGA高速处理的优势得不到充分体现。
方案二:采用STC89C52单片机作为系统的控制器软件编程灵活,可用软件较简单地实现各种算法和逻辑控制,并且由于其成本低、体积小、技术成熟和功耗小等优点,技术比较成熟,开发过程中可以利用的资源和工具丰富。
综合以上两种方案,选择方案二。
1.2 电机与驱动的论证与选择
方案一:采用步进电机作为小车的动力源。步进电机是一种将电脉冲信号转换成角位移或线位移的开环控制元件,可在各种数控系统中作为执行元件。但步进电机用于小车功耗高且需要相应的硬件驱动。
方案二:采用直流电机作为小车的动力源。直流电机具有优良的调速特性,能承受频繁的冲击负载,可实现频繁的无级快速启动、制动和反转。直流电机的驱动电路简单,可使用L298N驱动。本设计用到两个直流电机,可以实现系统需求且成本低。
综合以上两种方案,直流电机控制小车转角精度足以满足题目要求,选择方案二。
1.3 检测系统的论证与选择
方案一:采用光敏电阻对黑线判断。光敏电阻光照性为非线性、反应灵敏度一般,检测距离范围有限,其受外部影响较大,检测信号易出现误差。
方案二:采用激光收发管对黑线判断。激光收发管线性度好、反应,其受外部影响很小。但对黑线判断需要黑白对比度高,成本相对较高,要求较严格。
方案三:采用红外收发管对黑线判断。红外收发管线性度一般,反应较快,检测范围一般,受外部影响不大,对黑线判断可通过调节来改变黑白对比度不同的灵敏度,成本低廉效果好。
综合考虑采用方案三红外收发管作为检测系统对黑线判断。
2 系统理论分析与计算
2.1 智能小车控制系统
智能小车控制系统一般可看作自动引导系统,使得智能小车跟随道路的变化而运行,另一方面,智能小车在走直线或弧形线时,也可以看作一个恒值调节系统,能够跟随道路变化而更加平稳快速的运行。在设计控制算法时,要既能满足跟随系统的动态特性,同时又能满足恒值调节的稳定特性。
2.2 智能小车转向和速度的控制
控制模型车的转向和速度,使其能够跟随道路的变化来运行。实现这一目标有两个难点:一是各种外界干扰因素作用于系统,从而影响被控对象偏离控制规律,例如道路变化、检测信号的噪声和电池电压不稳定等;二是车体自身的惯性影响使得被控量变化不能够灵活自如。
3 电路与程序设计
3.1 电路的设计
3.1.1 系统总体框图
系统总体框图如图1所示。小车以STC89C52单片机作为系统核心,按键切换程序用来检测运行不同的程序,红外收发管判断出黑线并产生低电平给单片机来确定小车的运行,
3.1.2 红外检测子系统
红外收发子系统原理图,如图2所示。
3.1.3 电源
电源由7.4V锂电池提供,通过L7805三端稳压管输出5 V为单片机系统、L298芯片、无线通信模块供电,通过L7806三端稳压管输出6V给L298N为直流电机供电。
3.2 程序设计
3.2.1 程序功能描述与设计思路
(1)程序功能描述:根据题目要求,软件部分主要实现小车的转弯和调速。①小车转弯功能:设置小车一侧车轮速度大于另一次车轮速度实现转弯; ②小车调速功能:设置PWM的不同值驱动小车变速。
(2)程序设计思路:小车左侧传感器检测到黑线左轮全速,右轮低速,实现右转;右侧检测到黑线左轮低速,右轮全速,实现左转。
3.2.2 程序流程图
主程序流程图如图3所示。
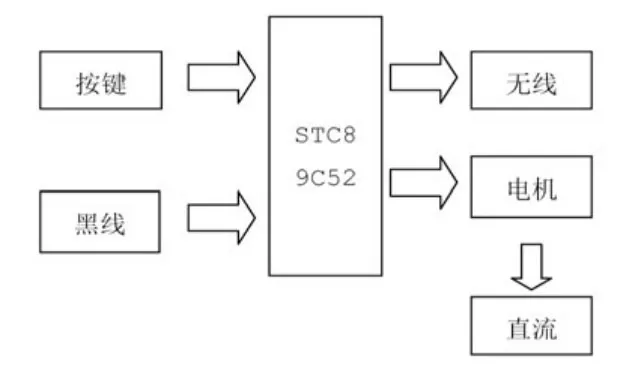
图1 系统总体框图
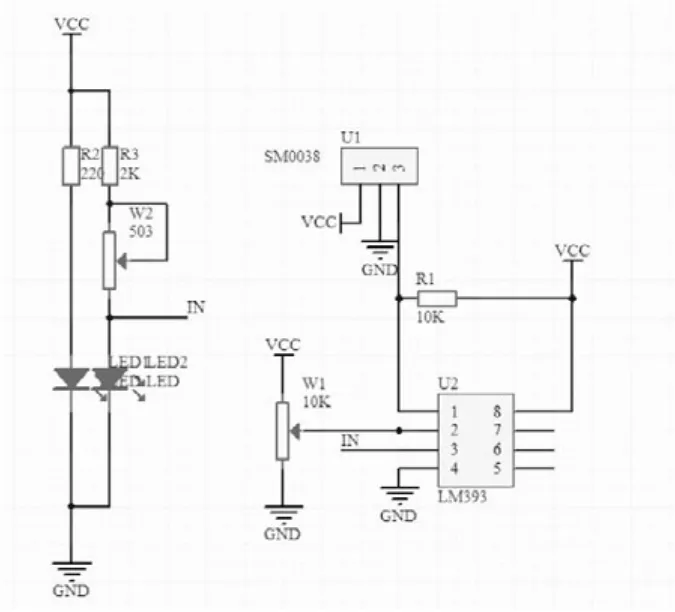
图2 红外收发子系统原理图
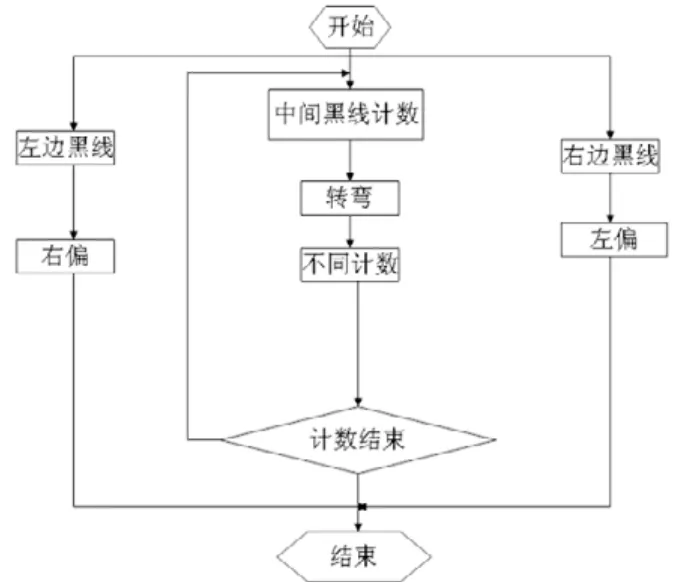
图3
4 结语
本文介绍了以STC89C52单片机为核心的智能车的论证与设计,采用单片机控制外围传感器和驱动电路,结构模块化,稳定性好,相应的软件设计简单,易于对硬件车体进行控制。通过测试,此多功能智能车能够很好的实现循迹、壁障、遥控等功能。
[1]郭天祥. 新概念51单片机C语言教程 [M].北京 :电子工业出版社,2009.
[2]丁元杰. 单片微机原理与应用 [M]. 第2版.北京: 机械工业出版社,2003.
[3]毕满清. 模拟电子技术基础[M].北京:电子工业出版社,2008.
[4]韩炎.数字电子技术基础,[M].北京:电子工业出版社,2009
The designi s based on STC89C52 microcontr oller core of the control of the smart car, the infrared transceivetr ube detectiona nd recognitiomn, oto r driver using L298 driver chip on the runwayl ine, the drive motor to controtl he car forward and turningt, he use of rechargeablilte hiumb atteries as the entire system for power supply. The infrare d transceiver tube detection signal microcontroller IO port pass throught he microcontroltlehre, microcontr oller to make differentj udgmenbts y differenti nfrare d transceivetr ube signal and controtl he motor to complette he car forward, obstacle avoidan ce, corneringo, vertakinga nd other appropriaatec tion , the car also joined wirelests ransceiver moduley, ou can by remotec ontrol, manuacl ontrol of the vehicle in motionp, osturet, he lines of the designi s simple, low cost.
高华磊(1990-),男,山东日照人,在读本科生。
10.3969/j.issn.1001-8972.2012.11.095
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
快乐语文(2020年36期)2021-01-14 01:10:32
少年文艺·我爱写作文(2020年11期)2020-11-23 01:52:52
科学大众(2020年17期)2020-10-27 02:49:02
文苑(2018年22期)2018-11-19 02:54:18
电子制作(2018年8期)2018-06-26 06:43:02
饮食与健康·下旬刊(2017年12期)2017-12-06 17:53:41
电子制作(2017年1期)2017-05-17 03:54:12
初中生之友·中旬刊(2015年10期)2015-11-03 00:08:50
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
