基于chirp-z变换的斜视FMCW-SAR非线性尺度变换算法
2012-10-25 02:09:56于彬彬王岩飞
雷达学报 2012年1期
于彬彬 刘 畅 王岩飞
①(中国科学院电子学研究所 北京 100190)
②(中国科学院研究生院 北京 100039)
1 引言
随着SAR技术的高速发展,SAR小型化的需求越来越迫切。小型SAR技术的难点在于载荷体积和重量的控制。对于传统脉冲体制的SAR系统,发射机的瞬时功率较高,相应的硬件的体积和重量较大,很难小型化。调频连续波合成孔径雷达(Frequency Modulated Continuous Wave Synthetic Aperture Radar,FMCW-SAR)的开发与应用解决了上述问题[1-3],FMCW-SAR 的发射信号为连续波信号,因此和传统脉冲体制的SAR系统相比,发射机的瞬时功率较小,发射机的体积与重量也相应降低。
FMCW-SAR与传统脉冲SAR回波信号在距离向略有不同,但成像算法类似。FMCW-SAR的成像算法包括距离多普勒算法(Range-Doppler Algorithm,RDA)[4]、频率尺度变换算法(Frequency Scaling Algorithm,FSA)[5]、距离徙动算法(Range Migration Algorithm,RMA)[6]等。RDA是基本成像算法,运算量小但成像精度低;RMA是精确成像算法,但其实际成像精度取决于插值运算的精度,成像精度越高,则运算量越大。相比而言,FSA的特点介于两者之间,其核心思路是在多普勒域进行线性频率尺度变换,较为精确地校正距离徙动[7]。与FSA原理类似,chirp-z变换方法也是一种通过引入线性调频信号进行线性尺度变换的算法,其原理稍有不同,但处理信号的结果是一致的[8]。
当FMCW-SAR工作在斜视模式时,回波信号在多普勒域形成的距离徙动项具有非线性的形式。原始的FSA和chirp-z算法只能对该距离徙动项进行线性校正,该校正仅对场景中心处的点目标是精确的,距场景中心线越远,其校正误差越大,最终的聚焦效果也越差。
文献[9]提出了一种斜视SAR改进FS算法,该算法对去斜率接收的回波信号进行处理,可以直接应用于FMCW-SAR。由于该算法基于FS算法,在计算过程中需要进行5次距离向FFT或IFFT,运算量较大,而采用chirp-z变换则只需要4次;同时,频率尺度变换操作会造成距离向频谱混叠,需要进行升采样操作,该算法中斜视角越大其升采样率越大,运算量也越大,而采用chirp-z变换只需升一倍采样,更适合大斜视角成像。
针对以上问题,本文提出一种斜视 FMCWSAR的非线性尺度变换 chirp-z算法,该算法可以对多普勒域回波信号的距离徙动项进行非线性校正,从而得到更好的成像效果。本文首先建立斜视FMCW-SAR信号模型,分析该模式下FMCW-SAR回波信号特点,在原始chirp-z算法的基础上提出本文算法,该算法在chirp-z变换中引入三次相位,对回波信号进行非线性尺度变换,更精确地进行二次距离压缩和校正信号的距离徙动项,相比原始chirp-z算法得到更高的成像精度。最后,通过点目标仿真对本文提出算法的有效性进行了验证。
2 回波信号模型
图1为FMCW-SAR斜视模式下的几何关系图,阴影区域表示了地面上测绘带的范围,O为慢时间tm的零时刻载机位置,RC为场景中心到载机航线的垂直距离,v为载机速度。
若点目标沿方位向位于x处,到雷达载机航线的垂直距离为RB,则其去调频接收回波信号为[10]
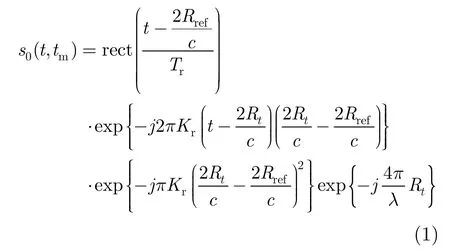
其中


图1 斜视FMCW-SAR几何关系图
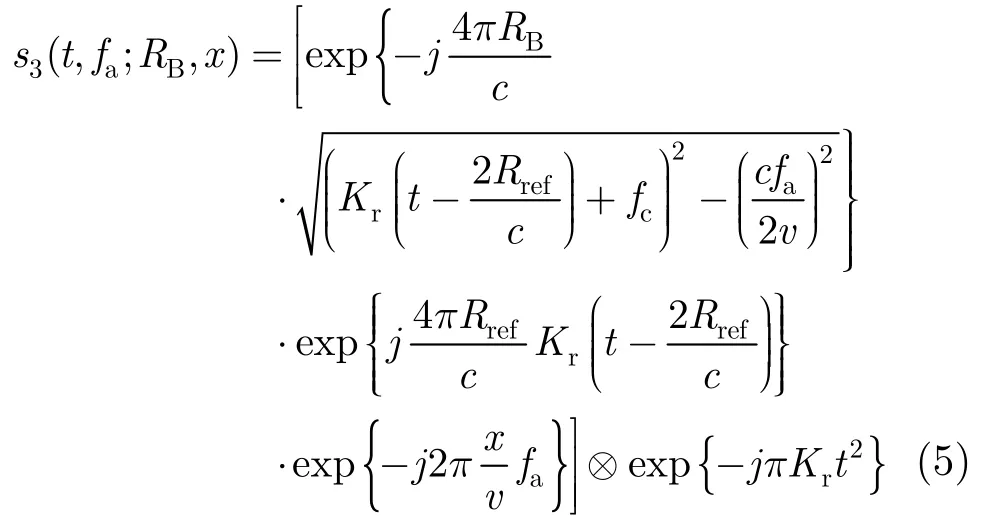
式(1)中Tr为接收回波总持续时间,Kr为发射线性调频信号的调频斜率,Rref为去线性调频的参考距离,并假设它对应的延迟时间与接收回波的中心采样时间相同。式(1)中的第2个相位项是去斜率接收方式中独有的残留视频相位(Residual Video Phase,RVP)项[11]。
式(2)中Rt随快时间t变化,产生快时间走动项。FMCW-SAR与传统脉冲体制SAR相比,拥有大的脉冲持续时间,则并不成立,也即“走-停”假设失效,需要额外的步骤校正该快时间走动项[12]。下式为快时间走动项的校正式:
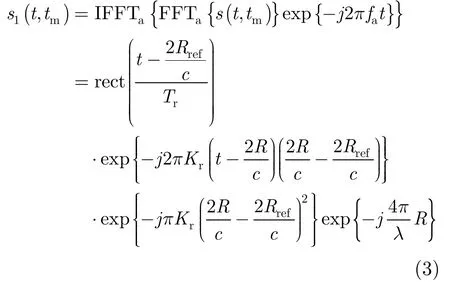
其中fa是多普勒频率变量,上式中FFT及IFFT均为1维方位向操作。
由驻相点法可以得到上式的另一种表示方法:
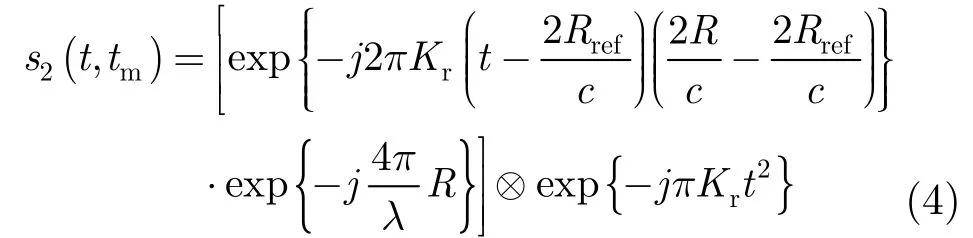
使用驻相点法,对上式作方位向FFT,可得多普勒域信号:
3 非线性chirp-z变换算法
在介绍本文非线性chirp-z变换之前,首先需要对式(5)进行处理。去除其中的卷积项,并与参考距离上点目标的匹配函数相乘,得到
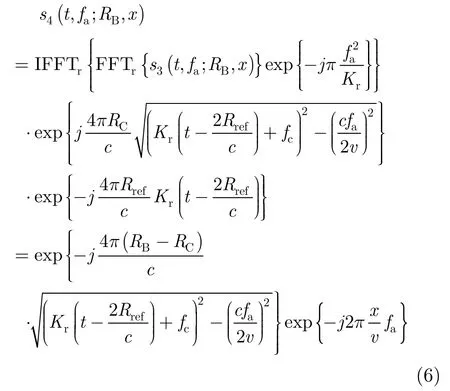
上式中FFT与IFFT均为距离向的操作。将式(6)的第1个相位项写成如下形式:

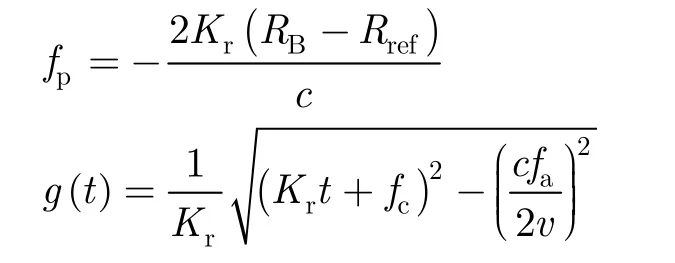
其中
原始的chirp-z线性尺度变换式为[13]
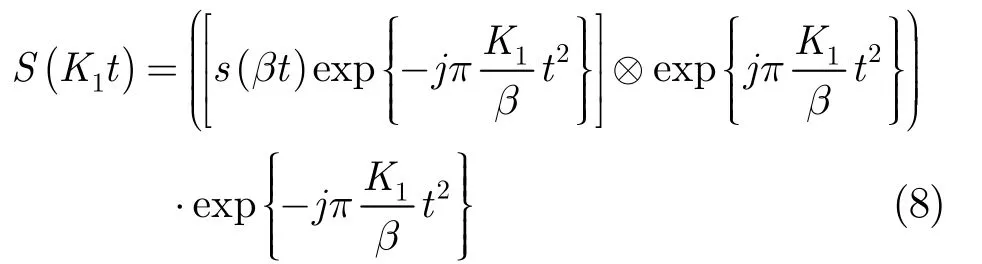
其中S(fr)为s(t)的频域形式,为尺度变换的比例因子。当距离向采样率为fs,采样点数为Nr时,取可以满足S(K1t)和S(fr)具有相同数字信号的条件。
基于上述原始chirp-z变换式,通过引入非线性调频信号 e xp{−j2πh(t)}可以对式(7)实现非线性尺度变换:

其中h0(t)是和h(t)相关的相位函数。S(fr)为所需信号s(t)=exp {j2πfpt}的频域形式,则有S(K1t)=。对于g(t),假设存在一个h(t)使得上式成立,下面求解h(t):

对t求导得:

即
当fp较小时,上式变为

为使式(9)右边第一步乘法不产生频移,应有h′(0)=0,则应使h′(t)=K1(g(t)−g(0)),令h(0)=0,可以通过积分解出:

再令t=0 ,解出:

可以看出,对于给定的函数g(t),可以解出式(9)中所需函数h(t)和h0(t)。然而,对于不存在解析式,只能将g(t)泰勒展开,截取若干项对h(t)进行近似求解。特殊地,当仅取常数项和一次项时,求出,这就是原始的 chirp-z算法。但当雷达波束斜视角较大时,g(t)泰勒展开式的二次及以上项不能忽略,此时采用原始chirp-z算法将引入较大相位误差,造成成像精度降低。
经过分析,斜视角较大时,取g(t)泰勒展开式二次及以下项可以满足要求,如下式:

积分求出h(t):

将式(16),式(17)代入式(15),得到
将式(16)~式(18)代入式(9)验证,前后卷积项之间的相位误差为
上式相位越小,卷积操作匹配的效果就越好。上式中最大误差相位为

其中tmax=Nr(2fs),fpmax=Bc2,Bc为接收回波有效带宽,且满足Bc<Fs。
在一定斜视角下,如果使用原始的chirp-z算法成像,将得到如下的聚焦误差:
其最大误差相位为

比较式(20)与式(22),二者比值为

由此可见式(20)中最大误差相位比式(22)小。也就是说,本文提出的非线性chirp-z变换相对于原始chirp-z变换可以更好地补偿距离徙动校正时的误差相位,提高算法的成像精度。
对式(6)进行上述非线性chirp-z变换处理之后,再进行方位向IFFT即可得到成像结果。
4 仿真结果
本节通过点目标成像验证上述分析。仿真采用表1中的参数,模拟回波包含5个点目标。对于同一模拟回波信号,分别采用原始chirp-z算法和本文提出的非线性尺度变换chirp-z算法,得到成像结果。5个点目标的非线性chirp-z算法成像结果见图2。

表1 仿真参数
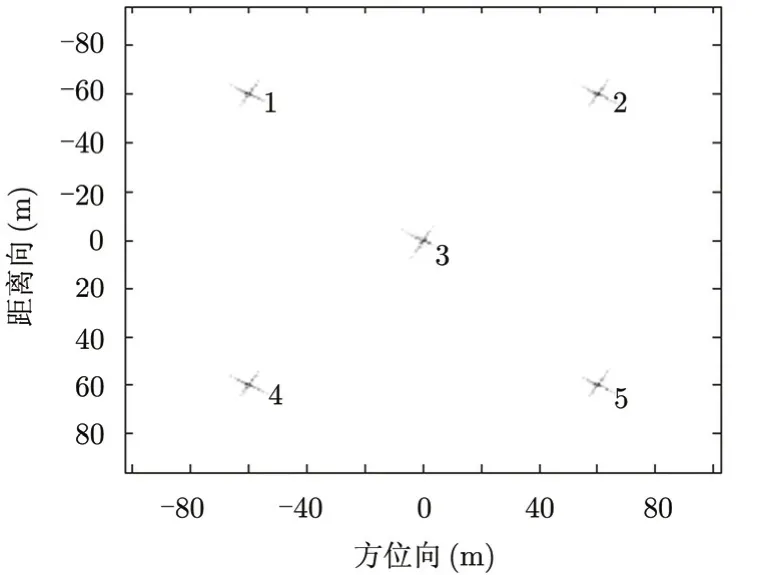
图2 5个点目标的成像结果
选取图2中的3个点目标进行成像精度分析,图3,图4,图5分别给出了使用原始chirp-z算法和非线性chirp-z算法成像后的2号、3号、4号点目标的2维分辨率。表2为它们的脉冲响应的3 dB宽度。可以看出,对于图4中场景中心的点目标,两种算法的成像结果非常接近,而在图3和图5的分图中,图(c)比图(a)中的分辨率高,图(b)和图(d)中的分辨率较为接近。同时,表2中的数据也可以说明,改进后的算法与原始算法相比,对场景中心线以外点目标的方位向压缩结果较为接近,而距离向的分辨率能够提高大约30%。
从式(19)和式(21)中可以解释上述仿真结果。式(21)中原始chirp-z算法的误差相位是快时间的线性调频信号,它相当于距离压缩时的不完全匹配,造成距离向的散焦。式(19)中非线性尺度变换 chirp-z算法的误差相位是快时间的线性信号,不影响距离向的聚焦,该误差的存在使得本文算法未能显著提高方位向分辨率。
使用原始chirp-z算法和非线性chirp-z算法成像后的图像,在2号、3号、4号点目标附近的图像强度对比度如表3。由表3可以看出,相比原始chirp-z算法,非线性尺度变换chirp-z算法可以将场景中心线以外区域成像结果的图像对比度提高大约50%。
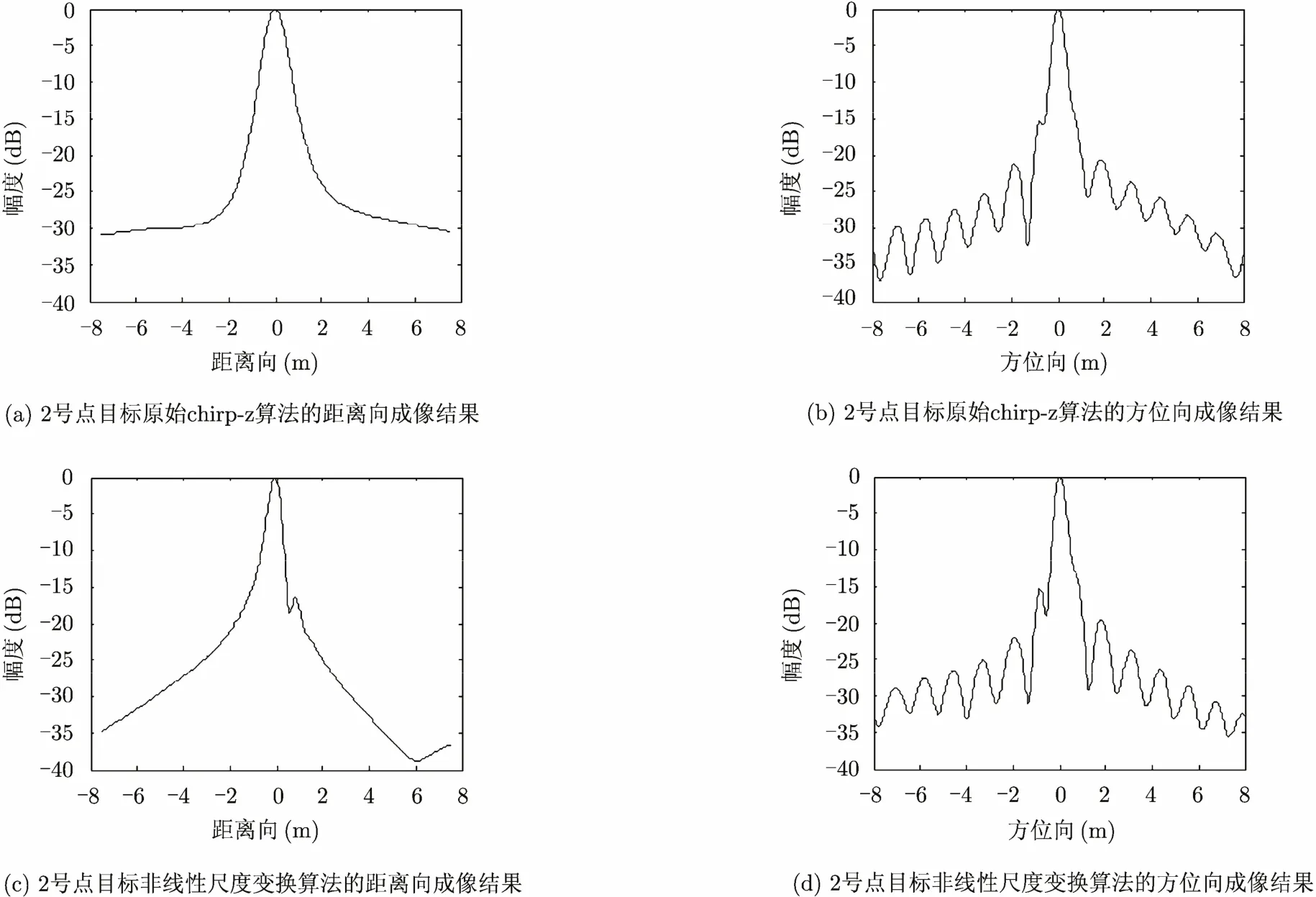
图3 2号点目标的成像结果
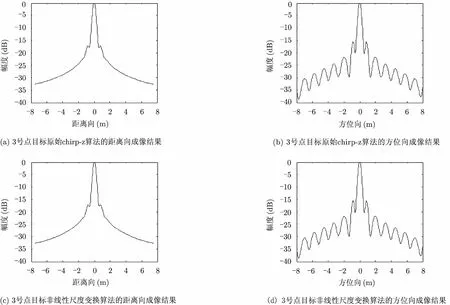
图4 3号点目标的成像结果
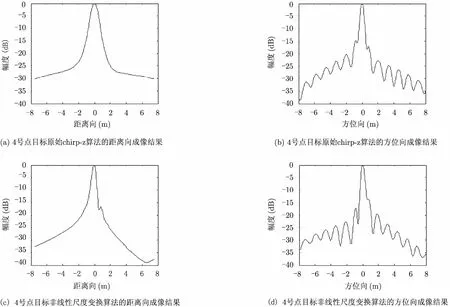
图5 4号点目标的成像结果
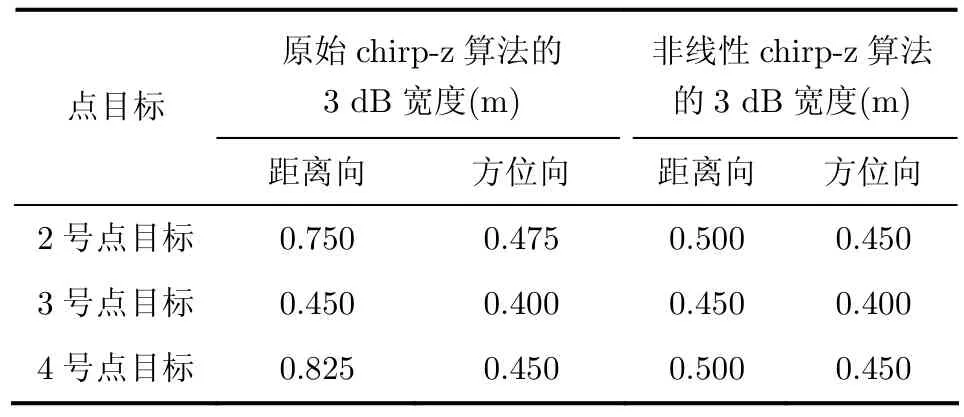
表2 两种算法点目标冲击响应函数的3 dB宽度比较
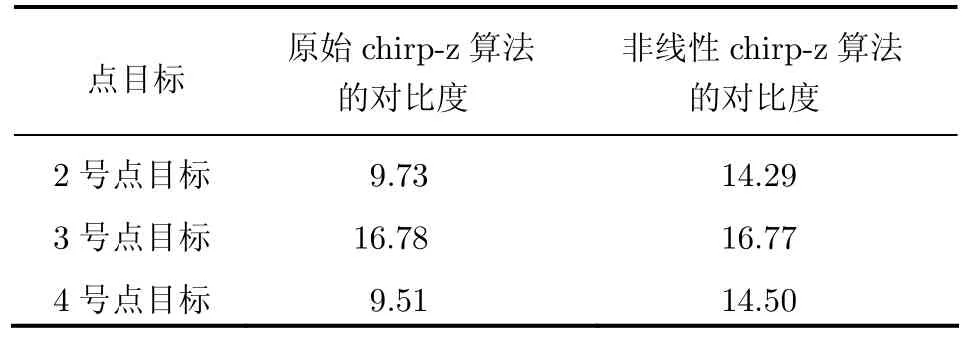
表3 两种算法成像结果中点目标附近的图像强度对比度
以上仿真结果与理论推导和分析结论一致,验证了本文提出的非线性尺度变换 chirp-z算法对提高斜视FMCW-SAR成像效果的有效性。
5 结论
本文针对FMCW-SAR在斜视模式下聚焦精度降低的问题,提出一种非线性尺度变换chirp-z算法。该算法对原始chirp-z算法进行改进,通过引入非线性调频信号,对回波信号进行非线性尺度变换,可以降低距离压缩和距离徙动校正的误差,提高雷达成像精度。从仿真结果可以看出,采用本文提出的非线性 chirp-z算法对点目标模拟回波的成像结果与原始chirp-z算法相比,距离向分辨率和图像对比度均得到明显提高,方位向分辨率保持不变。
猜你喜欢
能源工程(2021年5期)2021-11-20 05:50:42
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06 09:08:52
太空探索(2016年5期)2016-07-12 15:17:55
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年9期)2016-01-18 03:46:04
中国卫生标准管理(2015年8期)2016-01-15 03:58:44
中国当代医药(2015年29期)2015-03-01 02:07:48
海军航空大学学报(2015年4期)2015-02-27 13:45:51
时代英语·高三(2014年5期)2014-08-26 17:01:17
雷达学报(2014年4期)2014-04-23 07:43:09