基于SVM的加速度传感器积累误差消除方法
2012-10-22 01:06:24徐时伟沈海斌
传感器与微系统 2012年6期
徐时伟,沈海斌
(浙江大学电气工程学院,浙江杭州 310027)
0 引言
空中手写输入作为一种新颖的人机交互技术,相较于传统的平面手写输入,摆脱了手写板的约束,提高了设备的便携性并能提供更好的用户体验。随着MEMS技术的发展,越来越多的空间手写设备采用具有体积小、成本低等优点的MEMS加速度传感器作为输入环节。目前,基于加速度传感器的空中手写输入研究可分为两类:1)直接使用加速度信息进行字符或手势的分类识别[1];2)将加速度二重积分得到空间轨迹,再投影到平面作后续处理[2]。其中,第一类方法只能识别经过训练的字符或手势,因此,使用范围有限;而第二类方法可以利用现有的平面字符库,更具有通用性。
但由于制造过程和使用环境的影响,MEMS加速度传感器的输出不可避免地存在误差并受到噪声干扰。积累误差就是指这些误差与干扰在二重积分过程中被积累,使重建的空间轨迹严重变形。解决积累误差的经典方法是零速度补偿[3](zero velocity compensation,ZVC),其基本思路是将每帧样本的标准差与阈值比较,从而判断加速度传感器处于运动或静止状态,但需要优化包括阈值在内的4个参数,难以适应不同使用场合与不同用户。Yang J等人[4]对ZVC中的运动状态判断作了改进,将加速度幅值和角速度幅值分别与各自的阈值比较,需要优化2个参数,但由于不是基于每帧的统计信息而是逐个采样点比较,因此,易受噪声影响。Wang J S等人[2]提出了多轴动态开关(multiaxis dynamic switch,MAD)方法,用加速度阈值判断运动开始,用速度阈值判断运动结束,取得了比ZVC更好的积累误差效果,但依然有2个参数需要优化。
本文提出了一种基于支持向量机(supported vector machine,SVM)的加速度传感器积累误差消除方法,用SVM识别运动与静止状态。实验结果表明:本文采用的方法取得了比MAD方法更好地积累误差消除效果。
1 系统结构
基于SVM的加速度传感器积累误差消除方法的流程如图1所示。从加速度传感器采集到的原始加速度数据首先经过低通滤波,然后从中提取特征,用于SVM分类,最后进行积累误差消除并重建轨迹。

图1 系统流程图Fig 1 Flow chart of the system
2 低通滤波
在使用加速度传感器进行空中手写输入的过程中,有效信号为低频信号,但会受到随机噪声和手抖动的影响,因此,需要对校正后的加速度信号进行滤波。本文采用截止频率为5 Hz的10阶FIR低通滤波器进行去噪。
3 基于SVM的运动状态识别
3.1 特征提取
取N个样本点为一帧,帧移为1个样本点。假设从某一帧开始进入运动状态,则该帧与之前处于静止状态的帧相比,加速度幅值的均值必会增大,而且帧内样本点间的变化幅度也会增大。所以,对于每一帧选择各轴的均值和样本差值序列作为特征向量

其中,ai(k)表示当前帧内i轴的第k个样本点的加速度值(i=x,y,z),Δai(k)=ai(k)-ai(k-1)表示第k个样本点与前一样本点的加速度差值。
3.2 SVM 基本原理
SVM是一种基于统计学习理论的机器学习方法,以结构风险最小化为目标,克服了神经网络可能出现的局部极小、过学习等问题[5]。其基本思想是:通过非线性映射,把样本空间映射到一个高维特征空间,使得在特征空间中可以应用线性学习机的方法解决样本空间中的高度非线性分类和回归等问题。假设有训练样本集(x1,y1),(x2,y2),…,(xn,yn),其中,xi∈RN为N维向量,yi∈{-1,1}。对于这样的二分类问题,就是找到一个超平面wgx+b=0,使得yi(wgxi+b)≥1。而最优超平面应能使平面到训练集的分类间隔最大,寻找最优超平面可归结为以下二次凸规划问题

满足yi(wgxi+b)=1的训练样本点(xi,yi)称为支持向量。
若样本不是线性可分,则一方面对样本作非线性变换:xi→Φ(xi),使其转换到高维空间,另一方面对每个样本点引入松弛变量ξi和惩罚参数C,式(3)变为


而在高维空间里的内积运算可以用原空间里满足Mercer条件的核函数K(x,y)实现,因此,式(5)变为

4 积累误差消除与轨迹重建
虽然经过低通滤波,但误差与干扰并未完全消除,残留部分会在二重积分求轨迹的过程中逐步积累,导致实际静止时仍会有位移产生。本环节将静止状态下的加速度和速度强制为0,对运动状态下的加速度和速度作修正,并积分求得轨迹,具体步骤如下:
设0~k1与k2,k3的样本点处于静止状态,k1,k2的样本点处于运动状态(k1<k2<k3)

5 实验结果与分析
本文采用ADI公司的三轴加速度传感器评估板EVAL-ADXL345Z-M(图2)进行数据采集。ADXL345是一种超低功耗三轴加速度传感器,分辨率为3.9 mgn/LSB,采样率设置为100 Hz。
为验证本文所述方法的实际效果,4名试验者参加了数据采集。每人每次沿着坐标纸上预先画定的六边形移动加速度传感器,在运动到顶点时稍作停顿,共进行4次。对于采集得到的样本,先通过人工判断,确定每个样本点的运动状态(如图3所示),然后均分为两组,一组用于SVM分类器训练,另一组用于结果测试。本文使用libsvm[6]实现SVM分类,核函数选用径向基函数,进行了用户相关测试(user dependent test)与用户无关测试(user independent test)。其中,用户相关测试采用5-fold交叉验证,用户无关测试采用留一法(leave one out)。

图2 实验数据采集设备Fig 2 Acquisition equipment of data for experiment
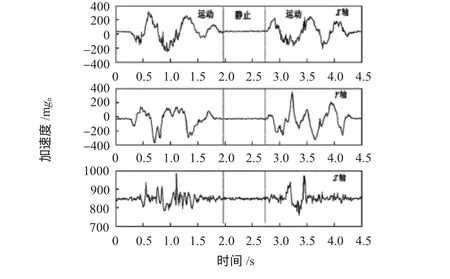
图3 样本数据的运动状态划分Fig 3 Discrimination of motion state for sample data
5.1 运动状态识别率
图4给出了用户相关测试与用户无关测试中,运动状态识别率随帧长N变化的关系。从中可以看出:N若太小,则特征向量不能准确地体现运动状态;N若太大,则造成信息冗余。为了兼顾各组实验,选择N=8。当N=8时,试验者1的状态识别率为96.8%,试验者2为95.3%,试验者3为92.1%,试验者4为94.3%,用户无关为90.3%。
5.2 与MAD方法比较积累误差消除的效果
本实验采用平均绝对位置误差来衡量不同方法的积累误差消除效果

其中,NTotal为走完一次六边形的样本总数,Posact(k)为经过轨迹重建所得的第k个样本点的实际位置,Posref(k)为第k个样本点的参考位置。
本实验另外采用MAD方法进行对照,由于手写力度和方式的细微差异,不同试验者的阈值有所差异。由表1可知,每个试验者用自己的MAD阈值取得最好的效果,但若用其他试验者的阈值,则效果较差,其中试验者1的样本用试验者2的阈值最为明显。图5给出了试验者1的样本经过SVM(用户无关)识别运动状态后重建的轨迹,以及用试验者2的阈值进行MAD处理后重建的轨迹。虽然由表1可知,试验者1的样本经过SVM(用户无关)识别运动状态后的位置误差比独自优化的MAD方法要大一些,但从实际轨迹重建效果看,其重建轨迹和参考轨迹接近程度较高,比用试验者2阈值进行MAD处理的效果要好。因此,本文所述方法取得了较好的积累误差消除效果,能够满足用加速度传感器进行轨迹重建的要求,并比基于阈值比较的方法具有更好的适应性。

图4 运动状态识别率—帧长N关系图Fig 4 Relation curve of motion state discrimination rate and frame length N
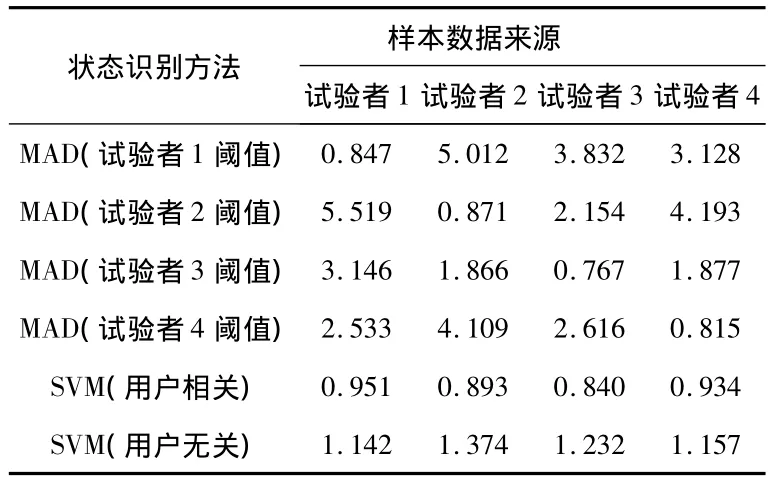
表1 平均绝对位置误差(cm)Tab 1 Average absolute position error(cm)
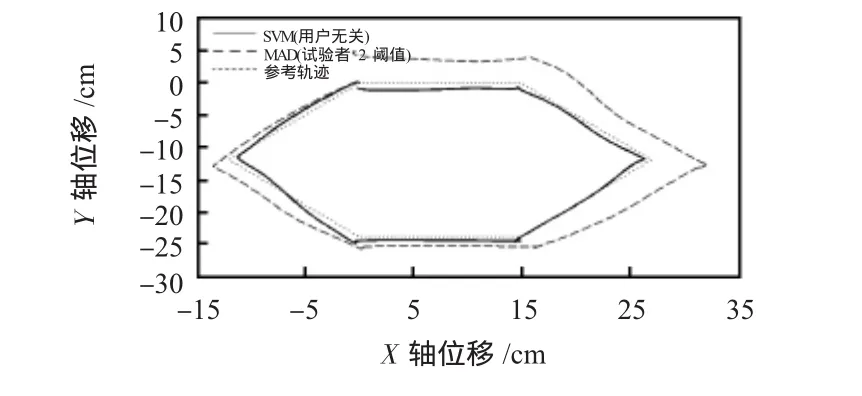
图5 试验者1的轨迹重建图Fig 5 Diagram of trajectory reconstruction of trier 1
6 结论
本文提出了基于SVM的加速度传感器积累误差消除方法,该方法将原始加速度信号经过低通滤波处理后,用SVM识别运动与静止状态,再进行积累误差消除与轨迹重建。实验结果表明:该方法与以往的阈值比较方法相比,能适应不同用户的书写习惯,提高了积累误差消除的有效性和重建轨迹的质量,这对提供空中手写识别的后续环节,如平面化、字符识别等的正确率有很大的意义。
[1] Choi Sung-do,Lee A S,Lee Soo-young.On-line handwritten character recognition with 3D accelerometer[C]∥2006 IEEE International Conferenceon Information Acquisition,Weihai,2006:845-850.
[2] Wang Jeen-shing,Hsu Yu-liang,Liu Jiun-nan.An inertial-measurement-unit-based pen with a trajectory reconstruction algorithm and its applications[J].IEEE Transactions on Industrial Electronics,2010,57(10):3508 -3521.
[3] Bang W C,Chang W,Kang K H,et al.Self-contained spatial input device for wearable computers[C]∥7th IEEE International Symposium on Wearable Computers,White Plains,US,2003:26-34.
[4] Yang J,Choi E S,Chang W,et al.A novel hand gesture input device based on inertial sensing technique[C]∥Industrial Electronics Conference,Busan,Republic of Korea,2004:2786 -2791.
[5] Vladimir N V.统计学习理论的本质[M].北京:清华大学出版社,2000.
[6] Chang C A L C.LIBSVM:A library for support vector machines[J].ACM Transactions on Intelligent Systems and Technology,2011,2(3):21 -27.
猜你喜欢
青年文摘(2022年22期)2022-12-07 23:43:12
当代水产(2022年6期)2022-06-29 01:12:20
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
汽车观察(2018年12期)2018-12-26 01:05:42
金桥(2018年4期)2018-09-26 02:24:46
劳动保护(2018年8期)2018-09-12 01:16:14
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29
发明与创新(2015年46期)2015-06-27 05:31:22