
厨余垃圾源头收运系统设计与优化研究
2012-10-16 09:17丁湘蓉施云春
环境卫生工程 2012年6期
丁湘蓉,施云春
(1.北京市海淀区环境卫生科学研究所,北京 100086;2.清华大学环境科学与工程系,北京 100084)
厨余垃圾因具有含水率、有机质成分高,油脂及含盐量高、易腐败等特性,与其他垃圾混合收集时造成大量的蚊蝇孳生、病菌疾病传播及空气污染。在运输过程中,现有收运方式易造成垃圾中渗沥液的遗撒滴漏及运输沿途的环境污染。混合垃圾进行焚烧处理时热值较低,填埋处理时渗沥液污染浓度高,从而导致焚烧和填埋处理出现相应问题。如果将厨余垃圾在源头上分离进行单独收集与处理利用,不但可以实现城市垃圾减量化,减少中转和运输费用,同时还有利于城市垃圾的焚烧和填埋处理。
针对厨余垃圾的特点,研究采用厨房用食物垃圾破碎机对厨余垃圾进行预处理,以真空输送代替传统的水力输送,在尽量少加水或不加水的情况下完成厨余垃圾的破碎及输送。对于新建小区,考虑将厨房下水道设置不同分支,将厨余垃圾破碎后直接从系统源头与生活污水进行分离,从而通过单独的管道系统排入转运或处理设施。这种管道式系统真正实现了将厨余垃圾从源头分类收集,并通过封闭式管道进行运输,减少了人力成本,彻底消除了厨余垃圾转运过程中的臭味、渗沥液遗撒等问题。
1 实验平台设计
本系统提供一种节水、能耗低、能有效控制异味扩散的厨余垃圾破碎-真空管道输送系统,同时,为满足后续对厨余垃圾的资源化利用,还设计了1种将破碎后的厨余垃圾浓缩脱水的装置。
厨余垃圾破碎-真空管道输送系统,主要包括水池、食物垃圾处理机、暂存罐、开关、收集罐、真空泵和三格沉淀池,如图1所示。水池是家庭中常用的水池;暂存罐是设在水池下方的装置,其作用是暂时储存破碎后的厨余垃圾;食物垃圾处理机是能破碎厨余垃圾的一种厨房家电;开关是接通或阻断系统内各部分连接的设备,可以是自动(带控制)的或手动的,但系统中某些部位必须使用自动(或带控制)开关;收集罐是起收集厨余垃圾作用的装置;真空泵用于维持系统的负压;三格沉淀池用于浓缩破碎后的厨余垃圾。
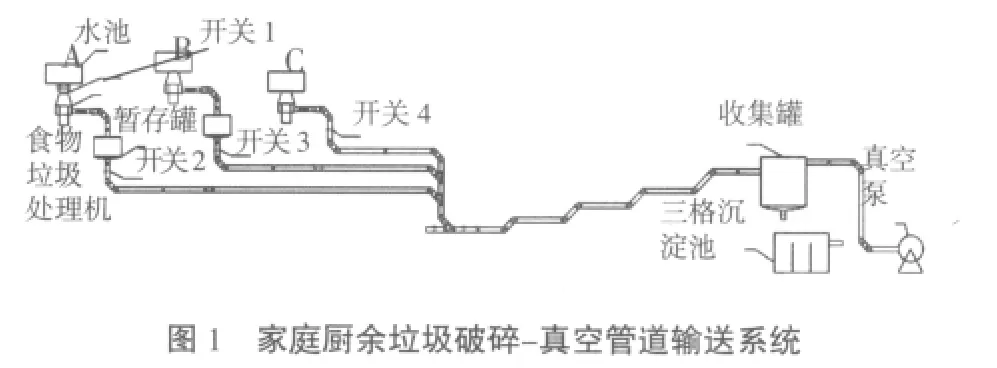
在用户终端,也就是家庭厨房,设计了3种可供选择的收集方式,如图1中A、B和C支路所示,3条支路结构上的区别见表1。

表1 3条支路结构
A、B、C 3条支路的运行方式具体如下。
A支路:在不需处理厨余垃圾时,开关1关闭,负压延伸到开关1之下。当需处理厨余垃圾时,将厨余垃圾倒入食物垃圾处理机的入口,破碎的过程中加入少量的水,厨余垃圾经食物垃圾处理机研磨破碎后进入暂存罐内暂时储存,完成破碎过程后(或暂存罐内液位达预设高度时)打开开关1,以系统的负压为动力,厨余垃圾被抽入真空管道内,并逐次被抽入收集罐内,暂存罐内的厨余垃圾排净后关闭开关1,系统又恢复原态。当收集罐内液位达预设高度时,打开收集罐底端开关(实际设计时需考虑收集罐的排料),破碎后厨余垃圾与水等被排入三格沉淀池内,厨余垃圾与水通过溢流的方式依次经过第一格、第二格和第三格,最终,可在第一格中收集到含固率较高的厨余垃圾,以便进行下一步的资源化利用。
B支路:在食物垃圾处理机上设自动开关2,且开关2和开关3互斥(即当开关2关闭时开关3打开,开关2打开时开关3关闭)。在不需处理厨余垃圾时,开关2关闭(此时开关3打开),系统的负压一直延伸到开关2,B支路上的暂存罐内也是负压,因此,系统内即使产生异味,也不会扩散到室内。当需处理厨余垃圾时,将开关2打开(此时开关3关闭),将厨余垃圾倒入食物垃圾处理机的入口,破碎的过程中加入少量的水,厨余垃圾经食物垃圾处理机研磨破碎后进入暂存罐内暂时储存,用完后(或暂存罐内液位达预设高度时)关闭开关2(此时开关3打开),以系统的负压为动力,厨余垃圾被抽入真空管道内,并逐次被抽入收集罐内,暂存罐内的厨余垃圾排净后关闭开关3(此时开关2打开),系统又恢复原态。与收集罐相关的操作同支路A。
C支路:食物垃圾处理机的开关与开关4联动,通过设定,使得开关4在食物垃圾处理机启动后15 s打开,当食物垃圾处理机关闭后15 s关闭。在不需处理厨余垃圾时,开关4关闭,负压延伸到开关4之下。当需处理厨余垃圾时,将厨余垃圾倒入食物垃圾处理机的入口,破碎的过程中加入少量的水,15 s后,开关4自动打开,以系统的负压为动力,厨余垃圾被抽入真空管道内,并逐次被抽入收集罐内,当处理完厨余垃圾时,食物垃圾处理机关闭,开关4延时15 s后自动关闭,系统又恢复原态。与收集罐相关的操作同支路A。
2 输送方式的优化研究
2.1 A与B的对比
选择不同的真空维持区间(见表2),对真空泵的持续运行时间进行基础测定。
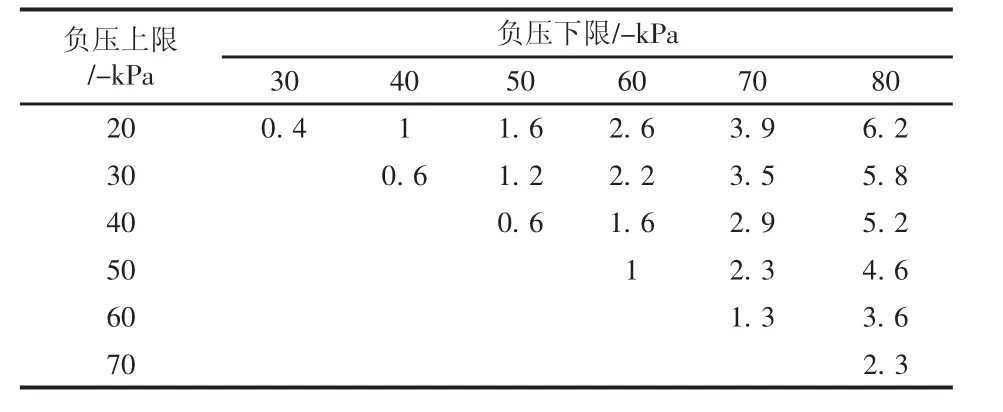
表2 负压下限-kPa真空泵工作持续时间 s
真空维持区间所选择的负压越高,真空泵的持续运转时间越长,因此,过高的负压维持区间是不经济的,同时,负压维持区间应满足厨余垃圾能抽吸到收集罐内,在真空排水系统中,选择的负压维持区间为-0.06~-0.04 MPa[1],本实验参考真空排水系统中所选的负压维持期间,选择的负压维持区间也为-0.06~-0.04 MPa。对于收集方式A,选择不同的真空维持区间,考察在15 min内真空泵的运转次数。
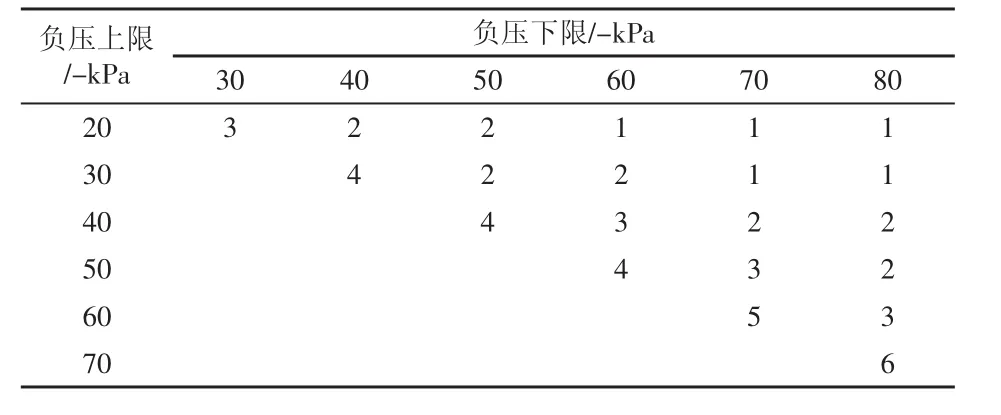
表3 真空泵开启频次(方式A)
综合表2和表3可得真空泵的累计运转时长,见表4。
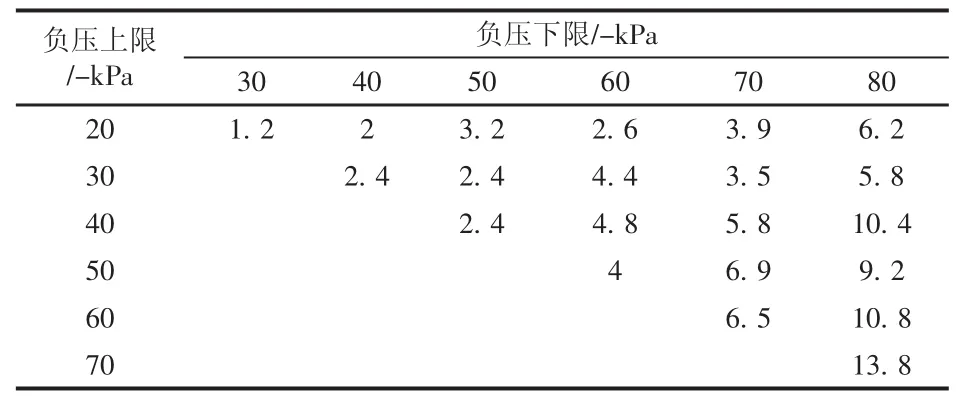
表4 真空泵累计运转时长(方式A)s
由表4可知:所选的真空维持区间越宽,真空泵的单次运转时间越长;所选的真空维持区间越窄,真空泵在给定时间内的运转次数越多;同理,对于收集方式B,选择不同的真空维持区间,考察在15 min内真空泵的运转次数,可计算其累计运转时长,见表5、6。
真空泵累计运转时长可由真空泵的单次运转时间与运转次数计算得到,开启时长与额定功率的乘积约等于用于真空泵的能量消耗。真空泵的额定功率一定,因此,通过比较不同真空维持区间下真空泵开启时长,可得不同真空维持区间下真空泵的能耗。对比方式A和方式B,在相同的压力维持区间内,真空泵的能耗相差不大,因此,从能耗的角度来看,收集方式A与方式B均是可行的。
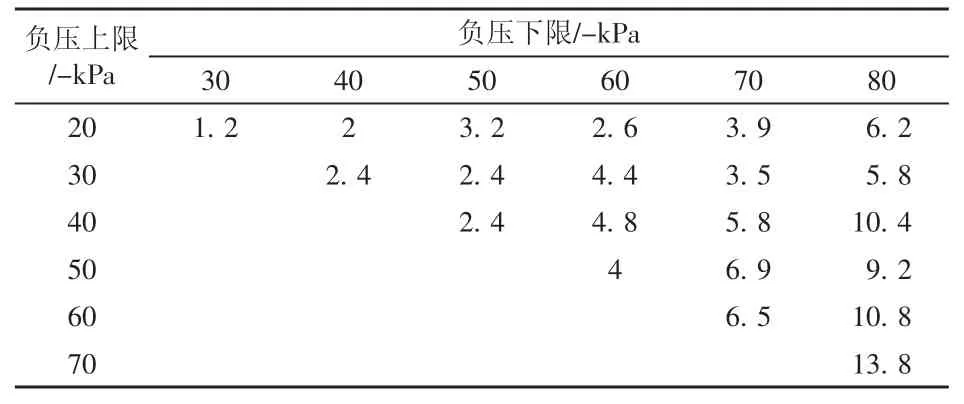
表5 真空泵开启频次(方式B)
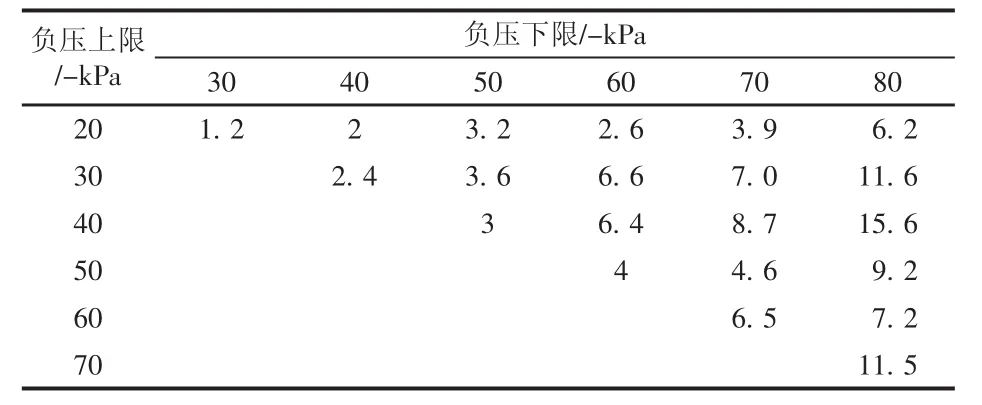
表6 真空泵累计运转时长(方式B)s
收集方式A结构简单,在实际中较容易实现;收集方式B在食物垃圾处理机上方加入能自动控制的开关,需对现有的食物垃圾处理机进行改进,目前在市场上还没有这种产品,需要加大对食物垃圾处理机的研发,待技术进步后,可采用收集方式B。
2.2 A、B与C的对比
先通过实验,得到处理单位质量的厨余垃圾破碎单元与真空输送单元的运转时间,进一步计算得其能耗,结果见表7。
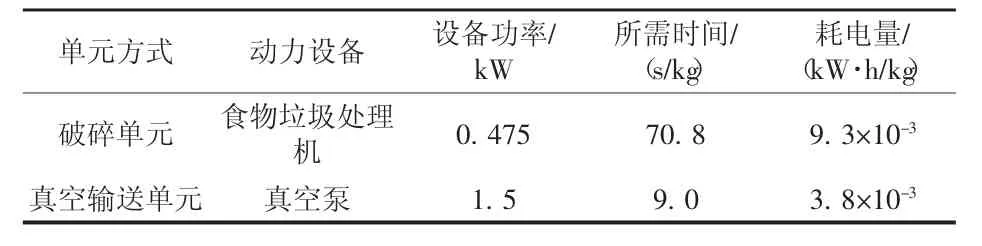
表7 破碎与真空输送单元的能耗对比
收集方式A或B都在破碎单元与输送单元间设置了暂存罐,将破碎单元的运转与真空输送单元的运转分开,因此,对收集方式A或B,破碎单元与真空输送单元的能耗与表7相同。对于收集方式C,因无暂存罐,设计的真空输送单元在破碎单元运转一定时间(设计为15 s)后启动,同时,当1个周期结束,破碎单元停止运转后,经过一定时间(设计为15 s)的延时,真空输送单元也停止运转,因此,真空输送单元的运转时间与破碎单元运转时间相同。在1个运转周期内,各种收集方式的能耗见表8。
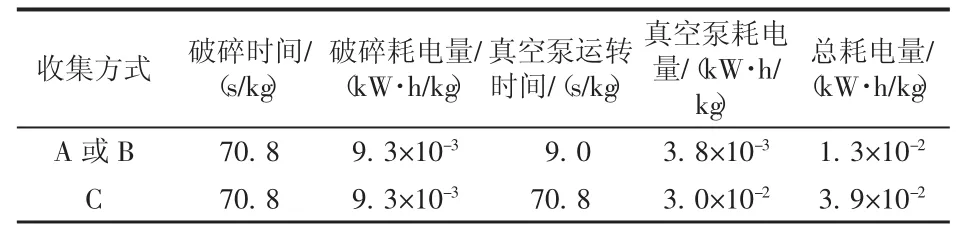
表8 各收集方式的能耗
由于厨余垃圾破碎所需时间大于真空抽吸所需时间,为了减少真空损耗,降低能耗,需设置暂存罐,将破碎后的厨余垃圾暂时储存起来,因此,应优先选用A或B方式。综上所述,在现阶段,可采用收集方式A,待相关技术成熟后,可采用收集方式B。
2.3 真空输送与重力输送的对比
真空收运系统以真空抽吸力为动力将破碎后的厨余垃圾输送到收集罐中,据前面的实验结论,在这里采用的是收集方式A,水只起润滑管壁的作用。而传统的重力输送是靠废物及水的重力。
2.3.1 水耗与能耗
破碎-真空输送与破碎-传统重力输送的水耗与能耗如表9所示。
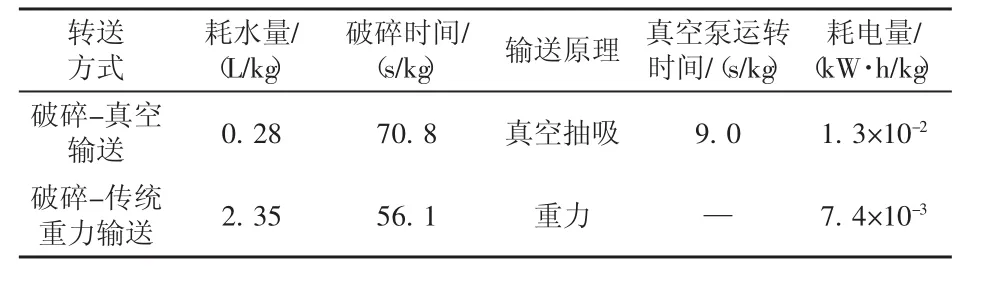
表9 破碎-真空输送与破碎-传统重力输送的对比
由表9可得,破碎-真空输送系统因以真空抽吸力为输送动力,其耗水量较小,仅为破碎-传统重力输送系统的12%,而其耗电量为破碎-传统重力输送系统2倍。
2.3.2 收集到的厨余垃圾性质对比
经破碎-真空输送与破碎-传统重力输送收集到厨余垃圾的性质如表10所示。

表10 破碎-真空输送与破碎-传统重力输送收集到餐厨垃圾的性质对比
经破碎-真空输送收集到的厨余垃圾含固率为14.8%,破碎-传统重力输送收集到的厨余垃圾的含固率仅为5.8%,因此,收集同样质量的厨余垃圾,采用破碎-传统重力输送系统得到的厨余垃圾的体积是破碎-真空输送系统的2.6倍。经破碎-真空输送收集到的厨余垃圾因含固率较高,能满足后续厌氧消化的要求,可以直接进后续的厌氧反应器进行厌氧消化。
破碎-真空输送系统因在破碎及输送过程中加入的水较少,其得到的厨余垃圾的黏度是破碎-传统重力输送系统的8倍左右,同时,其得到的物料在静置24 h后也未发生沉淀,后续的重力沉淀池对其无分离作用,同时,因其含固率高,能满足后续厌氧消化的要求,因此,今后的设计中可不考虑沉淀这一单元。经破碎-传统重力输送系统得到的厨余垃圾在静置24 h后也未发生明显沉淀,但因其含水率较高,在进入厌氧消化反应器前可能需采用其他方法进行浓缩。
3 结论
破碎-真空输送系统因以真空抽吸力为输送动力,其耗水量仅为破碎-传统重力输送系统的12%,而其耗电量为破碎-传统重力输送系统2倍。因采用真空抽吸,破碎后厨余垃圾在管道内流速较快,因此,通过真空输送的管道不易发生堵塞,其收集到的厨余垃圾含固率为14.8%,而破碎-传统重力输送收集到的厨余垃圾的含固率仅为5.8%。经破碎-真空输送系统收得厨余垃圾因其固含量高,能满足后续厌氧消化的要求,可以直接进入后续的厌氧反应器进行厌氧消化,不需要进一步的浓缩分离。同时,对比各种收集方式,收集方式A结构简单,在实际中较容易实现,在现阶段可采用收集方式A,而收集方式B对系统异味控制有更好的效果,待相关技术成熟后,可考虑采用收集方式B。
[1]范红兵.真空排水系统标准化初步研究[D].武汉:华中科技大学,2007.
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
水泵技术(2022年2期)2022-06-16
厦门科技(2021年4期)2021-11-05
环境卫生工程(2021年4期)2021-10-13
中国化肥信息(2020年6期)2020-11-20
小资CHIC!ELEGANCE(2019年28期)2019-09-12
造纸信息(2019年7期)2019-09-10
海峡姐妹(2019年1期)2019-03-23
小猕猴智力画刊(2017年12期)2017-12-27
环境保护与循环经济(2017年11期)2017-03-16
