
同轴滚筒泥浆自动流变仪的设计
2012-10-16 10:09赵艳芳
制造业自动化 2012年20期
曹 艳,赵艳芳,时 鹤
(1.中国矿业大学 机电工程学院,徐州 221116;2.河南平高电气股份有限公司,平顶山 467001)
0 引言
随着钻井技术的快速发展,钻井作业过程越来越趋于高产、高效和智能化。在钻井作业时,了解泥浆的流体参数方便我们在石油开采时选择合适的液压泵。此外,由于流变仪可以直观地测量流体的流变参数,准确的流变参数值如表观粘度、塑性粘度、静切力、触变性、流性指数等参数可具体反映流体的性能,在医疗、生物科技、化工、交通运输、制造等行业有着广阔的发展前景。由于流变仪可靠的实用性和广泛的应用前景,目前市场上各式各样的流变仪层出不穷,总的来说,流变仪按工作原理大致分为三大类,分别是毛细管式、旋转式和振动式。结合现有流变仪设计原理采用同轴滚筒旋转式流变仪,同轴滚筒的特殊几何构造可以较好的获得剪力值,数据输出部分采用角编码器和弹簧扭矩传感器双数据输出,结果可靠,数据精确。
1 整体设计
本流变仪整体设计结构如图1所示,动力源采用步距角为1.5°的三相六拍36BF003型步进电机。步进电机是一种把电脉冲信号转换成与脉冲数成正比的角位移或直线位移量的执行元件。即输入电脉冲的频率越高,电机输出的转速越快,通过调节电脉冲信号的频率控制步进电机的输出转速,系统采用89C51单片机控制电脉冲信号。电机转速通过V带轮传动至外滚筒,流变仪工作控制手柄与控制器相连,控制流变仪转速,显示输出数据。此设计具有体积小、易于携带、结构紧凑、操作方便、实用性强等优点。
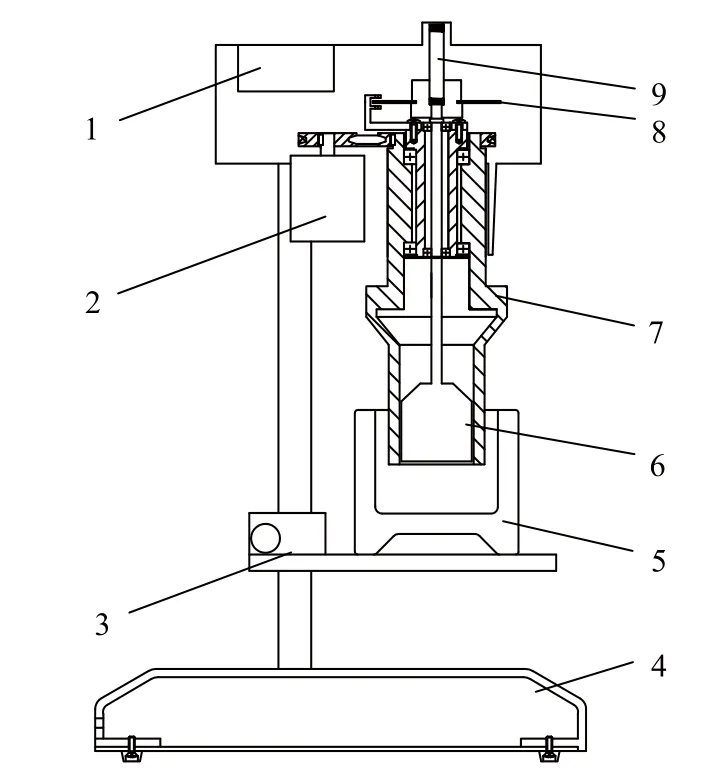
图1 泥浆自动流变仪示意图
2 基本原理
该流变仪采用双滚筒同轴结构,特殊的几何构造可以获得较好的剪率和剪切力,其结构如图2所示。外滚筒和内滚筒同时侵入泥浆中,为了获得较好的测量效果,侵入的深度L不易太浅。当电动机带动外滚筒旋转时,由于泥浆的粘滞性带动内滚筒转动,内、外滚筒之间环隙的距离要适中。当环隙过大时,内滚筒受到流体阻力小使传递效果差导致数据不准确,当环隙过小时,造成泥浆没有充分侵入内滚筒,无法传递输出转矩,一般取环隙距离1mm!3mm,不同的环隙间距使流体内部分子作用力不同,传感器输出值不同。内滚筒的旋转带动与其相连的角编码器和弹簧扭矩传感器,角编码器旋转的角度越大表明流体相对流动时的阻力越大即流体的粘度越大,从而把测量流体的粘度转换为角编码器的旋转量的测量。
根据牛顿内摩擦定律得:内滚筒旋转的角度与泥浆的粘度成正比,已知外滚筒旋转的角速度和内滚筒旋转力矩的关系如下:

式中:
ω——外滚筒旋转角速度(rad/s);
T——内滚筒旋转力矩(N·m);
η——泥浆粘度系数(Pa·s);
L——泥浆侵入深度(cm);
R1——内滚筒半径(cm);
R2——外滚筒半径(cm);
τ0——剪切应力(Pa)。
通过实验测量不同ω1、ω2,…,ωn时对应的内筒的扭矩值T1、T2,…,Tn,计算剪切应力τ0和粘度系数η,对得到的数据采用数值分析取最优值,从而分析泥浆的流体参数。
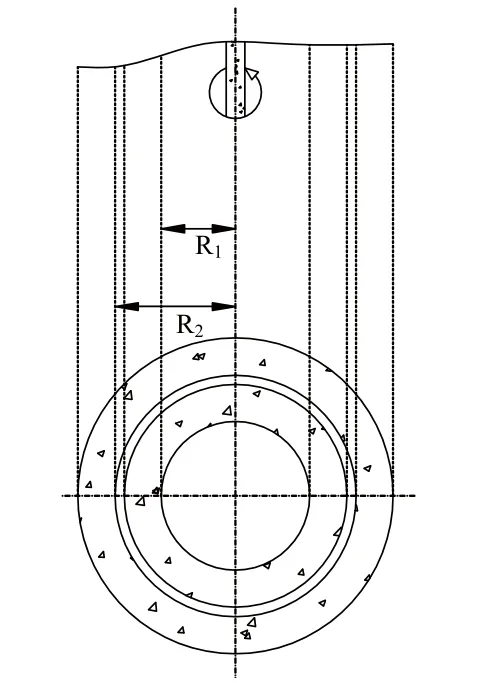
图2 同轴滚筒工作原理
3 控制系统
本控制系统由89C51单片机系统、步进电机转速控制系统、信号处理电路等组成,如图3所示。流变仪在测量时,步进电机输出转速ω1,转速传至外滚筒、内滚筒、角编码器及弹簧扭矩传感器,输出电信号经信号处理电路传至89C51单片机,通过LED显示。再通过单片机内部程序控制脉冲信号的输出频率,从而改变步进电机的输出转速ω,即测量流体在不同转速ωn对应的内筒的扭矩值Tn。步进电机控制方便、定位精确,选用十进制圆形码盘灵敏度高、数据准确。89C51单片机通过单片机串行口和信号处理电路对角编码器旋转值、弹簧扭矩值、步进电机转速值进行数据采集。
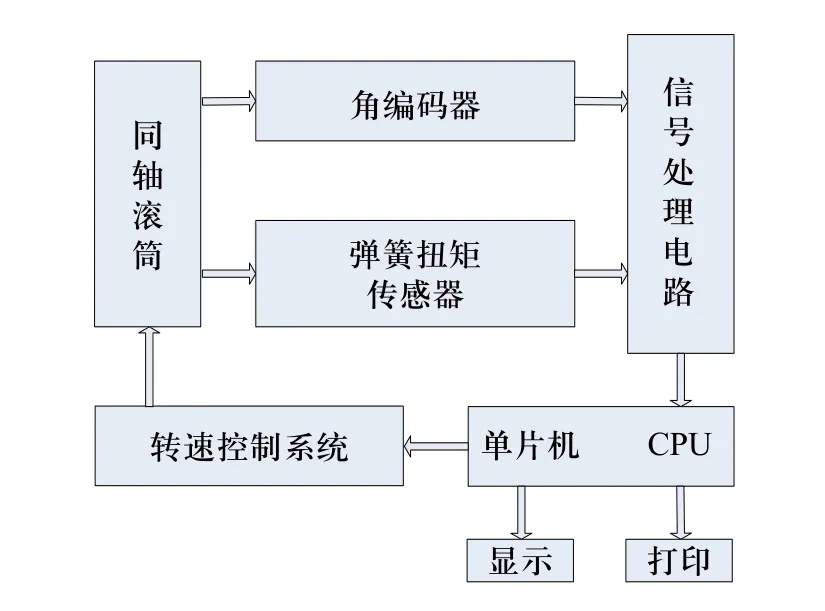
图3 控制系统流程图
4 影响因素
泥浆的流变参数在概念上有一定的时变性,随着温度、时间、测量状况、压力、前处理等因素而变化,这就要求若想获得较准确的流体参数,需采取合理措施消除不利因素引起的误差。
我们知道流体的粘度随温度的升高而减小,外滚筒带动内滚筒旋转时,由于流体分子的内摩擦作用产生阻碍相对流动的摩擦力生热,粘度越大在转动时产生的热量越高,温度的微升高会引起泥浆粘度明显的变化。有些设计者采用液体回路冷却方式,但是由于旋转的机械构造和空间的限制这种构思并不实用。针对温度补偿问题,目前较好的处理方法是采用模糊温度控制系统[1],将对象温度的偏差和输出量的偏差变化率划分为不同的模糊值,建立规则。研究和实践表明采用参数自整定模糊PID控制温度可以较好的消除由温度引起的粘度测量误差。
5 结束语
显微技术的发展激励了微流体技术的发展,也得到了人们越来越多的关注。对于微流体来说,靠减小扭转电机的转速或单方面提高传感器灵敏度并不能满足对复杂流体的微尺度测量,Christopher提出的微流体流变仪[2],可以针对复杂流体及非牛顿流体的微测量,也是今后流变仪发展的方向和趋势。
[1]姜楠.基于转矩流变仪的温度控制系统研究[D].哈尔滨理工大学, 2007.
[2]Christopher J.Pipe.Microfl uidic rheometry[J].Mechanics Research Communications, 2009, 36(1): 110–120.
[3]邹思竟, 徐力生.一种基于光栅传感器的新型旋转粘度计的研究[J].传感器与微系统, 2011, 30(9): 47-49.
[4]陈兴文, 刘燕.基于FPGA实现步进电机脉冲信号控制器设计[J].机械设计与制造, 2006, 2(2): 86-87.
猜你喜欢
幼儿教育(2022年10期)2022-10-28
机械管理开发(2022年9期)2022-09-23
网络安全与数据管理(2022年1期)2022-08-29
建材发展导向(2022年14期)2022-08-19
幼儿教育·父母孩子版(2021年6期)2021-08-05
建材发展导向(2021年24期)2021-02-12
——编码器
演艺科技(2020年7期)2020-08-13
船海工程(2018年1期)2018-03-01
制造技术与机床(2017年7期)2018-01-19
探测与控制学报(2015年4期)2015-12-15
