磁探搜潜系统的目标信号识别*
2012-10-16 08:04尹景涯
舰船电子工程 2012年3期
尹景涯
(中国人民解放军第4724工厂 上海 200436)
1 引言
磁探仪是磁异常探测仪的简称,它是一种探测由于潜艇的存在而使所在位置的磁场发生变化,进而发现潜艇的仪器,所以有的时候也称为磁力探测仪。它是反潜机的主要反潜探测设备,具有分类能力好、定位精度高、受浅海复杂水文气象环境影响小等优点。主要用于应召搜潜[1]。图1为磁探仪的示意图。

图1 磁探仪探潜示意图
磁探仪用来探测潜艇最早出现在第一次世界大战的1924年,当时用的的是一种“磁饱和式”磁力仪,探测距离也只有120m左右。如果飞机在离海面50m飞行的时候只能探测水下70m左右的潜艇。到了上世纪50年代,又出现了“质子旋进式”磁探仪,后来又出现了“光泵式”和“电子双共振式”磁力仪。近年来,随着超导技术的发展,科学家又在研究超导式磁探仪。
2 磁探仪的原理和结构
磁探仪按其探头的安装位置分为两种:一种是固定式,探头固定在反潜机内的某个位置,一般安装在尾部的无磁性探杆内;另一种是拖曳式,探头通过缆绳拖曳在反潜机后方某个高度上,见图2(a)。一般固定翼飞机采用固定式,直升机采用拖曳式,拖曳式的最大优点就是不需要对本机的磁干扰进行磁补偿,缺点是使用不方便。现在科学家正在研究一种浮标式磁探仪,又称 MAD浮标,见图2(b),它的工作方式和声纳浮标比较类似,接收处理系统也在反潜机上,不同的是水下分机是磁探仪,而不是声纳。

图2 拖曳式磁探仪及MAD浮标示意图
磁探仪按照其传感原理可以分为饱和式、质子旋进式、光泵式、电子双共振式和超导式磁探仪。以氦光泵磁探仪为核心的航空磁探仪系统组成主要有氦光泵探头、三轴地磁传感器、磁补偿器、磁探仪、微处理器系统及记录器等组成。氦光泵磁探仪完成对目标信号的检测,由于使用的是总磁场磁力仪,磁信号是叠加在地磁总场上的。如果采用光泵式探头,同样也要检测运载体(反潜机)本身引起的磁干扰。
三轴矢量磁力仪实质上提供航向与姿态信号,这些信号用来完成对运载体产生的永久感应和涡流磁场的自动补偿。补偿方式由微处理机按程序执行,最终产生的一种补偿信号用来抵消来自光泵磁探仪的未补偿信号中的复合磁干扰,最后在显示器上或记录器上的信号仅仅是目标信号[2~9]。氦光泵磁探仪主要由氦光泵探头和磁共振跟踪环路组成。环路部分包括氦吸收室、光敏监测器、相敏监测器和压控振荡器等。
3 磁目标的信号识别
氦光泵磁探仪工作时,从氦灯发出的光通过充有亚稳态氦原子的吸收室,然后利用红外光敏元件接收通过吸收室的光。氦吸收室在1.08μm波长的光和射频场的作用下,对外磁场产生磁共振吸收效应,利用共振环路使压控振荡器跟踪在磁场的拉摩尔频率上,当有潜艇出现时,外磁场就发生变化,压控振荡器频率产生相应的变化,从而检测出潜艇存在的异常信号。它主要利用的是光泵亚稳态氦原子的磁共振特性来检测总磁场强度的变化,即在垂直光轴方向的频率和外磁场拉摩尔频率F1相同的取向时,处于光泵取向状态下的氦亚稳态原子会产生磁共振吸收,F1为受低频调制的压控振荡器频率。F0为地磁拉摩尔频率。当F1>F0时,氦光泵控头只有调制频率的二次谐波;当F1=F0时,产生相应为负的调制频率基波光信号;当F1<F0时,产生相位为正的基波光信号,利用此特性再用光敏元件将光信号变为角信号经信号放大、相敏检波、积分后再通过控制振荡器的频率,使其锁定在地磁场拉摩尔频率上。这样就构成了跟踪式光泵磁探仪。磁测量存在如下的关系:

式中:H0为地磁场;F1为压控振荡器频率;R为氦亚稳定电子旋磁比。
为了充分发挥高精度磁探仪的探测效果,必须克服运载体运动时所造成的电磁干扰,而这种电磁干扰的强度通常比目标信号的强度大数十倍,频带范围亦落在目标信号的通频带内,所以检测目标信号的难度是非常大的。
而反潜机磁干扰主要由三部分组成:永久场、感应场和涡流磁场。永久场Hpd由机上各种恒磁性物质和电流源产生,可分解成与反潜机纵轴L、横轴T和垂直轴V相平行的分量P1,P2,P3。磁探仪所检测的是这些分量在地磁场He上的投影感应场Hid是机上铁磁性物质在地磁感应下产生的磁场在地磁总场上的投影。涡流磁场Hw是导电材料在反潜机运动中切割地磁场所产生电流引起的磁场。在高精度的磁探测中,通常把目标信号等效为磁偶极子场。光泵磁探仪检测的是地磁总场,它包括地磁场和目标产生的偶极子场之和。
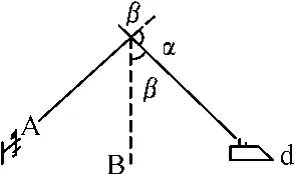
图3 搜潜坐标系
通常在搜潜的过程中,假定反潜机沿着AB飞行,而且认为目标相对为静止状态,则在一次飞行中,如果反潜机的速度v已知,则e=vt均匀变化,而角度α、β不变,则可以建立搜潜坐标系如图3所示。
本系统采用的是模式识别方案,对目标进行自动识别、报警和位置估计。
按照目标参数和搜潜坐标系中给定的位置参数(e、α、β),理论上目标信号有无穷多个。用模式识别中的聚类算法,可优化一定数目的样本。这些样本通过验证后预先进入内存,定义为

式中,i为第i号模式,j为第j个测量点;Xij为i号模式中的第j个测量值(经过了归一化)。只要判定:

就可识别是否为目标信号,同时给出报警信号。式中的J*为预定值。由于样本经过量化[10],在报警时,通过计算机反演就可计算出目标与反潜机的相对距离,从而完成对目标位置的估计。
4 结语
光泵式磁探仪通过目标信号的等效,采用模式识别的方案,运用聚类算法、样本量化等手段完成对目标位置的基本定位。
近年来,随着超导材料的出现,利用超导材料及技术做成的超导磁探仪也投入了应用。超导磁探仪与一般常规磁力仪相比具有灵敏度高、相应频带宽、量程广、灵活性大等特点,因此在未来的航空搜潜中将发挥巨大的作用,能大幅度提高探测距离,实现对磁干扰的自动补偿,提高识别目标的准确性和速度。超导磁探仪是未来磁探仪反展的重要方向之一。
[1]张海波,杨金成.现代潜艇技术[M].哈尔滨:哈尔滨工程大学出版社,2002:186-188.
[2]吴芳,杨日杰.航空磁探仪应召搜潜效能研究[J].测试技术学报,2008,22(2):144-147.
[3]韩瑞新,李春洪,陆勤夫,等.航空反潜中的磁探仪系统仿真研究[J].系统仿真学报,2009,21(9):2753-2756.
[4]屈也频,廖瑛.潜艇位置散布规律与搜潜效能评估模型研究[J].系统仿真学报,2008,20(12):3280-3283.
[5]海军装备论证中心.国外反潜战[M].北京:海军出版社,1987:192-193.
[6]屈也频.反潜巡逻机搜潜辅助决策系统研究[D].长沙:国防科技大学,2009.
[7]FORREST R N.Some notes on search,detection and localization modeling[R].Califonia:Naval Postgraduate School,1983.
[8]FORREST R N,EAGLE J N.An empirical analysis of a submarine motion model[D].Califonia:Naval Postgraduate School,1991.
[9]PATRICIA A T.Some priorities for a target probability area[R].Pennsylvania:Naval Operation Centre,2001.
[10]姚天仁,孙洪.现代数字信号处理[M].武汉:华中科技大学出版社,1999.
猜你喜欢
军事文摘(2022年14期)2022-08-26
小哥白尼(军事科学)(2022年1期)2022-04-26
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
小哥白尼(军事科学)(2021年6期)2021-11-02
小哥白尼(军事科学)(2021年12期)2021-03-29
小哥白尼(军事科学)(2021年11期)2021-02-28
百科探秘·航空航天(2017年9期)2017-11-07
中学生数理化·高二版(2016年12期)2017-02-28
Coco薇(2016年1期)2016-01-11