基于小波包分解的水面目标吨位大小分类方法
2012-10-14 03:42邱家兴李彬项田超
中国科技信息 2012年16期
邱家兴李彬项田超
1,海军潜艇学院,青岛,266100;2,中国人民解放军91199部队,舟山,316000;3,海军东海舰队司令部,宁波,315000
基于小波包分解的水面目标吨位大小分类方法
邱家兴1李彬2项田超3
1,海军潜艇学院,青岛,266100;2,中国人民解放军91199部队,舟山,316000;3,海军东海舰队司令部,宁波,315000
基于不同吨位大小的水面船舶辐射噪声特点,提出了一种利用小波包分解提取各频率段能量作为分类特征,利用支持向量机算法进行分类的方法。比较了基于三种不同核函数的支持向量机性能。仿真结果表明,利用小波包分解和支持向量机能对水面目标吨位大小进行有效估计。
小波包分解;支持向量机;水面目标;吨位大小分类
Abstract
Based on surface target radiated noise characteristics of different tonnage size,a method of extracting the frequency band energy as the classification features using wavelet packet decomposition and using the algorithm of support vector machine classification is presented. The performance of support vector machine based on three different kernel functions are compared. The simulation results show that,the method using wavelet packet decomposition and support vector machine can estimate the tonnage size of surface target effectively.
Keywords
wavelet packet decomposition;support vector machine;water surface target;tonnage size classification
引言
在水声目标分类识别过程中,特征提取与分类器技术是最重要的两个关键环技术。由于海洋环境的复杂性及水声信号低信噪比的特殊性,如何从船舶辐射噪声信号中提取一种既能反映目标本质特征,又能满足水下探测要求的有效特征表示,一直是该领域研究的难题和热点。船舶在海上航行中,多数船只为民船,其中要么为商船,要么为渔船,两者最主要的不同主要体现在吨位差异上。目标相距较远时,船载传感器经常难以判断其吨位或判断错误,对船上指挥员的决策形成较大误导,对船舶航行造成较大危险。因此吨位大小判断是水声目标识别中很重要的一部分,但目前专门针对此两类目标分类的研究较少。
不同吨位水面目标由于航速和起伏的不同,导致两种类型目标噪声的频率分布特点存在较大差异。本文提出利用小波包变换提取各频段的能量作为识别特征向量,小波包变换是一种重要的时频分析方法,是一种比较理想的信号处理数学工具。
传统水声目标识别的方法如神经网络等都是建立在样本数目趋于无穷大时的渐进理论基础上。但在实际问题中训练样本的数目往往有限,在实际应用中都难以具备较好的泛化能力,对未知样本的分类能力较弱。支持向量机(Support Vector Machine , 简称SVM) 是一种小样本情况下基于统计学习理论的机器学习方法,它为解决小样本学习问题提出了一个框架理论,该方法已在人脸识别、指纹识别等领域取得了较好的应用成果。而在水声目标识别方面的应用研究仍较少。
1 小波包分解与特征提取
小波包分解是小波变换的一种改进方法。正交小波变换仅对信号的近似系数(也即信号的低频部分)做进一步分解,而对细节系数(信号的高频部分)不再继续分解,因此,可以很好的表征信号的低频信息,但不能对信号的细节信息很好的表征。而小波包分解对近似系数和细节系数都进行分解,使得信号分析更加精细。
利用小波包分解提取目标噪声特征的步骤如下:
(1)对目标噪声信号进行四层小波包分解,提取第四层所有16个频率成分的小波包分解系数:AAAA4,DAAA4,ADAA4,DDAA4,AADA4,DADA4,ADDA4,DDDA4,AAAD4,DAAD4,ADAD4,DDAD4,AADD4,DADD4,ADDD4,DDDD4。
(2)对第四层提取的16个小波包分解系数重构,分别得到16个频率成分的信号。则重构后的总信号S可表示为S=S4,0+S4,1+…+S4,15。
(3)计算各频率成分信号的能量,设信号成分S4,j的能量为E4,j,(j=0,1,…, 15),则有

(4)提取识别特征矢量。特征矢量T可表示如下:
T=[E4,0, E4,1,…, E4,15]
2 支持向量机和核函数
由于船舶噪声特征为非线性的,在噪声特征空间中,无法找到一个分类超平面将两类目标完全分开。利用支持向量机进行分类,关键在于选取某种非线性变换Φ,将输入空间的噪声特征x变换到一个更高维的特征空间中,在变换后的空间中求解最优分类超平面:
(w·Φ(x))+b=0
使得两类噪声特征在这个高维特征空间中可以被该最优超平面分开。所谓最优的含义就是要求分类超平面不但能将两类样本正确分类,而且使两类样本之间的分类间隔最大,即离超平面之间的距离最大。可以证明超平面的分类间隔等于2/||w||,使分类间隔最大等价于使||w||2/2最小。利用拉格朗日(Lagrange)乘子方法可将最优化分类面问题转化成其对偶问题,即在约束条件

其中,上式仅针对支持向量求和。而且,可以看出上式建立的分类决策函数中仅涉及特征空间向量的内积运算。即在高维空间只需进行内积运算,因此我们没必要知道变换的形式,只要一种核函数K(xi·xj)=φ(xi)· φ(xj)满足Mercer条件,可利用该核函数在输入噪声特征矢量与特征空间矢量之间建立一种变换关系,支持向量机即可实现,避免了高维空间里的计算。此时,支持向量机的分类决策函数可以表示为

不同的核函数就可以生产不同的支持向量机,目前,SVM常用的核函数有3种:

3 仿真实验
利用海上实录船舶辐射噪声,采样率为25.6KHz,采样时间为10秒。按照吨位大小将待分类的信号为2类,如商船属于大型船舶,渔船属于小型船舶。每类目标各有300个样本,其中100个样本作为训练样本,另外200个样本作为测试样本。

图2 不同目标的小波包能量特征比较
实验对各样本进行四层小波包分解,提取16个频率成分的小波包能量组成16维特征向量,图2中四幅图分别为大型油轮A、大型商船B、渔船C和渔船D的小波包能量特征。从图中可以粗略看出,两艘商船之间的小波包能量特征具有一定的相似性,两艘渔船之间也具有一定相似性,而商船与渔船之间具有较明显差异,说明小波包能量特征具有作为识别特征的可行性。
应用基于三种核函数的支持向量机算法对两类目标进行分类识别,实验结果如表1。
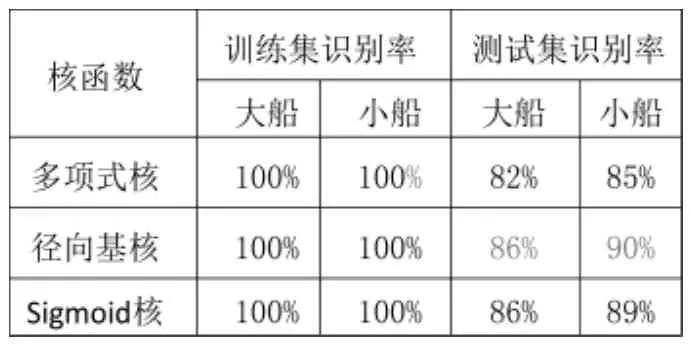
表1 支持向量机对两类目标分类的实验结果
分类实验结果表明:
①不同吨位水面目标辐射噪声间的小波包能量特征具有较大差异,可分性好,与SVM分类算法结合进行分类,识别率均不低于80%,说明小波包能量特征能够较好的反映两类目标的本质特征。
②在基于小波包能量和支持向量机的船舶吨位大小分类中,三种核函数相比较而言,径向基核更具有优势。
4 结语
本文将小波包分解与支持向量机结合,用于水声目标吨位大小的分类识别,取得有益的效果。研究表明,此方案具有可行性,如果与现有较为成熟的水声目标分类识别技术结合一起,会对整体识别率的提高有较大的促进作用。
[1]刘健.基于小波变换和支持向量机的水下目标分类方法[J].火力指挥控制,2011,36(9)
[2]吴正国.现代信号处理技术:高阶谱、时频分析与小波变换[M].武汉:武汉大学出版社,2003,1
[3][美]Pang-Ning Tan,Michael Steinbach,Vipin Kumar著,范明等译,数据挖掘导论:完整版[M]. 北京:人民邮电出版社,2011.1.
[4]张南,基于支持向量机的模式识别方法研究[J].舰船科学技术,2006,10.
Surface Target Tonnage Size Classification Method Based On Wavelet Packet Decomposition
Qiu Jiaxing1Li Bin2Xiang Tianchao3
1,Navy Submarine Academy,Qingdao,266100;2,PLA 91199 Unit,Zhoushan,316000; 3,East China Sea Fleet Headquarters,Ningbo,315000
10.3969/j.issn.1001-8972.2012.16.014
猜你喜欢
山东冶金(2022年1期)2022-04-19
山西电子技术(2022年1期)2022-02-28
计算机应用与软件(2022年2期)2022-02-19
上海理工大学学报(2021年6期)2021-12-29
数学年刊A辑(中文版)(2021年3期)2021-11-05
建材发展导向(2021年15期)2021-11-05
成都信息工程大学学报(2021年1期)2021-07-22
数学年刊A辑(中文版)(2021年2期)2021-07-17
装备制造技术(2020年2期)2020-12-14
船舶标准化工程师(2020年1期)2020-06-12