
基于仿真技术的船舵模拟系统在自动舵维修中的运用
2012-10-14 15:55汤华
科技传播 2012年8期
汤 华
海军902厂,上海 200083
0 引言
自动操舵仪包括航迹自动舵、航向自动舵。自动操舵仪是最重要、最基本的航海装备,其性能优劣直接关系到船舶的航行安全。不论是航向自动舵还是航迹自动舵,都是反馈控制系统。随动操舵有一个舵角反馈回路,自动航向操舵具有舵角和航向两个反馈回路,航迹控制方式则具有舵角、航向和位置三个反馈回路。舵角反馈、航向反馈、位置反馈涉及到电磁阀动作、液压泵、液压机构及舵叶的运动、船体航向的变化、船体速度的变化、船体姿态位置的变化、海流及风浪对舰船的影响等多个复杂因素。在自动舵生产调试或修理过程中,要真实检测自动舵的各种控制性能,必须具备构成上述反馈的船舵模拟系统,在陆基条件下检验其性能的优劣,实时进行参数的调整。
1 船舵模拟系统研究现状
船舵模拟系统是自动舵生产调试、维修、教学过程中不可或缺是设备。目前国内普遍采用的船舵模拟系统是采用尺寸缩小的液压站、油缸实物模拟自动舵的控制对象——液压舵装置,通过自动舵给出打舵信号,实际观测油缸动状态来判断控制系统是否出现:零偏、冲舵、超调、震荡等故障。
随着国内自动舵装备的不断发展,航迹舵、自适应舵等装备不断出现,从自动舵输出的控制信号到形成各种反馈给自动舵的信号,要经过电磁阀、电磁球阀或电液阀、变量泵及液压舵机系统、舵叶、船体、电罗经、定位系统等,涉及风、流、浪等因素,还要考虑到GPS信号、综合导航信号的介入。上述船舵模拟系统已难以胜任对自动舵的生产调试、维修、教学需求。为此,急需研制新型船舵模拟系统,实现对新型自动舵工作大环境的模拟,以适应自动舵生产、维修、调试的需求。高速发展的计算机仿真技术为此提供了可能。
2 基于仿真技术的船舵模拟系统构建
2.1 数学模型的建立
2.1.1 液压舵机系统运动模型
变量泵控制液压舵机的流量,因而控制转舵速度,变量泵受电磁阀或电磁球阀、电液阀控制。液压机构推动舵叶产生的舵角变化可用以下模型描述:

其中Vδ为转舵速度,t为转舵时间,δmax为最大舵角。
2.1.2 舵角-航向及船位变化数学模型
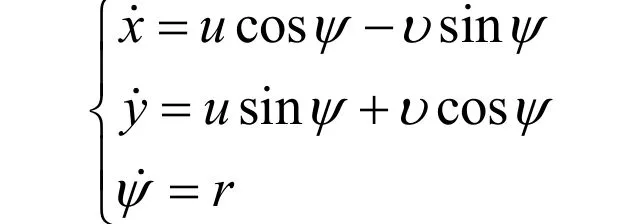
基于船舶运动的动态过程,系统需要建立船舶运动数学模型,反映舰船运动的实际动态特性。船舶位移及转艏运动可由以下数学模型建立:
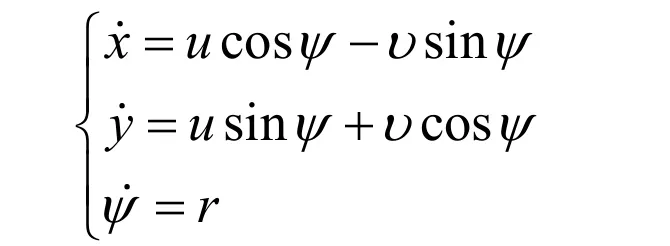
式中u、υ为航速U在舰船前进方向和正横方向的分解,r为转艏速率,漂角为β时:
2.1.3 风、海浪、海流干扰模型
为了真实地反映海浪对船舶运动的影响,系统采用了两种方式计算海浪对船舶运动的影响,一种是根据海浪的波高及谱密度研究海浪对舵叶的力矩扰动,计算其对舵角、航向的影响。另一种方法是将海浪干扰直接等效到的对舵角的扰动,再通过舵角对航向的控制模型计算对航向的影响。
2.1.4 电磁阀运动模型
理想的电磁阀具有没有延迟的开关特性,当输入电压超过其阀值时,电磁阀完全打开,反之关闭。实际上电磁阀具有一定的动作延迟时间,延迟时间的大小直接影响自动舵动态性能,比如延迟时间过长会造成随动操舵振荡。
2.1.5 电液阀运动模型
和电磁阀相比,电液阀有一线性响应区间,当输入电压在某一范围内时,电液阀打开的角度与输入电压成比例。输入电压小于其下阀值时,电液阀完全关闭;输入电压超过其上阀值时,电液阀完全打开。
2.2 系统的实现
系统采用一体化工控机作为核心控制单元,主要包含:一体化工控机单元、报警信号模拟单元、罗经航向模拟单元、综合电源单元、舵角驱动单元、舵角反馈驱动机构等单元构成。其中,各模拟单元通过单片机控制电路实现半实物物理仿真;舵角反馈驱动机构的作用是通过步进电机执行系统对舵角的模拟动作,步进电机转轴通过齿轮、连杆带动舵角驱动轴。舵角反馈驱动机构上可固定被测自动舵的舵角反馈机构,步进电机带动的舵角驱动轴和反馈机构的轴用连接轴固连。
3 在自动舵维修中的应用
3.1 功能的实现
3.1.1 对航向自动舵的检测
航向自动舵是指是一种用来对舰船航向进行自动调节的装置。其基本原理如下:
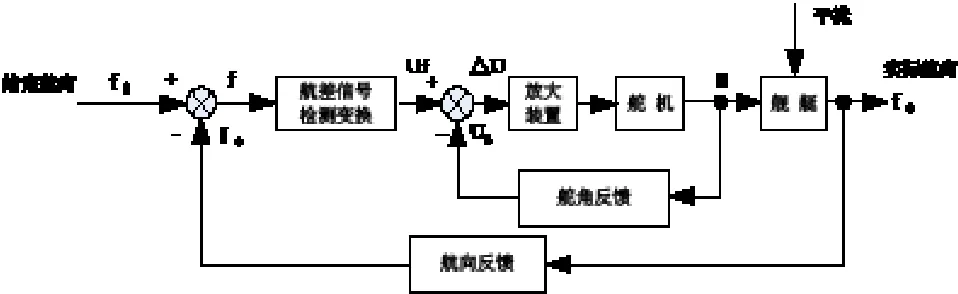
因此,在陆基条件下,完成其调试检测工作,需要形成舵角反馈和航向反馈以及模拟报警信号。
航向反馈:新型船舵模拟系统的罗经航向模拟单元通过单片机控制电路控制步进电机形成模拟的罗经信号;工控机通过舵角反馈单元采集航向自动舵产生的打舵信号经数学模型计算得出船舶航向的响应发送至罗经航向模拟单元形成新的模拟航向,从而形成航向负反馈。
舵角反馈:舵角驱动单元通过采集航向自动舵的操舵控制信号,计算舵角变化速度,控制步进电机带动舵角反馈机构转动,反馈机构的转动通过机械连接带动舵角反馈电机转动,从而形成舵角负反馈信号。
模拟报警信号:报警信号模拟单元通过开关触点与公共线相连,报警线与公共线相连,通过模拟报警触点的闭合、开启形成报警信号有效、失效,同时可接收、显示自动舵输出的延伸报警信号。对应不同的航向自动舵,模拟报警信号可定义成不同的内容,如动力失电、过载、断相、失压、油位低、油温高、油压低、滤器阻塞、液压锁定、阀失电等。
船舵模拟系统与航向自动舵的陆基连接关系如下:

通过以上关系,可形成全面的航向自动舵陆基调试环境,可检测出航向自动舵电路上存在的零位偏移、反馈反向、死区电压设置不合适、放大电路振荡、积分电路不工作、超调量过大、报警电路失灵等故障。
3.1.2 对航迹自动舵的检测
航迹自动舵是指通过一定的控制算法给出控制信号,控制舵机适当的转舵,进而使舰船按需要的航行计划航行的装置。其基本原理如下:

因此,在陆基条件下,除需要满足航向自动舵的调试条件以外,还需位置的反馈信号,主要是指GPS信号和计程仪信号。这两种信号均为数字信号,通过工控机的软件可顺利实现对其的模拟。
船舵模拟系统与航向自动舵的陆基连接关系如下:

通过以上关系,可形成全面的航迹自动舵陆基调试环境,除实现航向自动舵故障测试的功能以外,还可对航迹模块的功能进行检测。
3.2 效果评估
通过该船舵模拟系统,可全面检测和评估航向、航迹自动舵的技术状态。在自动舵维修中,经该系统调试后的设备装船后,各项指标均满足技术要求,避免了反复的海试和调整。与以往的液压系统船舵模拟系统相比,该系统省却了复杂的机械装置和液压管路,可灵活移动,检测项目全面,检测结果可存储、对比,且通过设置不同的应舵参数可模拟大、中、小等不同的船型。
4 结论
将基于仿真系统的船舵模拟系统应用到自动舵维修中,可极大提高维修的效率,减少维修所需的硬件投入,降低维修成本,具有较高的经济效益。
猜你喜欢
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
舰船电子工程(2020年4期)2020-06-19
家庭医学(下半月)(2020年1期)2020-05-11
中国医疗设备(2020年2期)2020-03-01
电子制作(2018年1期)2018-04-04
电子制作(2017年23期)2017-02-02
发明与创新·大科技(2016年5期)2016-05-17
焊接(2015年1期)2015-07-18
中国水运(2015年2期)2015-04-23
