
交流电动机中转矩和磁场的关系
2012-10-12 03:28:18周扬忠陈艳慧董纪清陈道炼
电气电子教学学报 2012年6期
周扬忠,陈艳慧,董纪清,陈道炼
(福州大学电气工程与自动化学院,福建福州350108)
0 引言
直接转矩控制DTC(Direct torque control)是“交流调速系统”课程重要内容之一,也是当今交流电动机重要控制策略之一。DTC摒弃了磁场定向控制思想,用定子磁链和转矩双闭环控制替代矢量控制系统中的电流闭环控制,将电动机和逆变器作为整体,直接在定子静止坐标系中利用逆变器输出电压矢量控制定子磁链矢量的幅值、旋转方向及旋转角度,实现转矩直接而快速控制。尽管不同电动机上实现DTC策略有不同之处,而且各自的理论发展非常完备,但很少有文献致力于这些理论的共性研究,其中转矩与磁场之间关系的共性研究尤为重要。文献[1] 推导出异步电动机DTC中电动机转矩受控于转差,文献[2] 推导出永磁同步电动机DTC中电动机转矩受控于定子磁链与转子磁极之间的夹角(定义的转矩角)。而笔者论文[3]和Pyrhonen[4]均推导出电励磁同步电动机DTC中转矩受控于定子磁链与气隙磁链之间的夹角(定义的转矩角)。这些转矩控制理论看似各不相同,但却有本质上的一致之处。对于定转子双边均有绕组的交流电动机(例如异步电动机、同步电动机)而言,电磁转矩的产生本质上是基于二磁场之间的相互作用,而对于磁阻电动机(例如开关磁阻电动机)而言,电动机的电磁转矩的产生本质上是基于磁阻的差异。本文以三相交流电动机为例,从定子侧看电动机产生的电磁转矩均可以用下面通用的公式表示

式中,Te为电磁转矩,Pn为磁极对数,ψs是定子磁链矢量,isy是定子磁链定向坐标系中y轴上的定子电流分量。定子磁链如图1所示,其中αβ为定子两相静止坐标系。
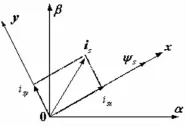
图1 定子磁链定向
式(1)清楚地显示对于任何交流电动机,无论在系统动态还是系统稳态,只要控制定子磁链矢量幅值为恒定即可实现系统高性能的转矩控制。而控制定子磁链矢量幅值却不必要磁场定向,也没有必要旋转坐标系和静止坐标系之间的复杂变换。这样即可以避开矢量控制策略在具体实现中的瓶颈,所以DTC将定子磁链矢量幅值作为被控制量。这样一来,研究定子磁链矢量与另外一个磁链矢量之间的作用便成为交流电动机DTC理论中一个重要的研究内容。
1 DTC中转矩与磁场通用关系
DTC策略高性能地控制电磁转矩是以定子磁链幅值控制为恒值为前提条件的,快速控制定子磁链矢量旋转方向及旋转角度,实现转矩直接而快速控制。这样必然要求另外一个与定子磁场相互作用产生电磁转矩的磁场具有一个基本特性,即该磁场的变化速度必然远小于定子磁场的变化速度。这也是交流电动机能否采用DTC策略的一个前提条件。这样,定转子均有绕组的交流电动机的电磁转矩可以表示成如下通用的表达式:

其中,ψq为满足条件的另一个磁链,KT为转矩常数,δsq为与ψq之间的夹角。
若磁链ψq为一个时间常数较大的环节,则在一个控制周期中可以认为ψq磁链矢量模不变,则在定子磁链幅值恒定情况下,可得如下微分表达式:

所以在定子磁链控制为定值情况下,通过δsq角的快速控制即可实现电磁转矩的迅速控制。交流电动机中存在着定子磁链、气隙磁链、转子磁链和转子磁极磁链,那么对于某一确定电动机,具体选择哪种磁链才能满足上述条件?这样它与定子磁场相互作用后,迅速控制定子磁链即可迅速调节电磁转矩。下面,我们针对不同类型的电动机进行分析。
2 DTC中转矩与磁场具体关系研究
2.1 异步电动机
若是异步电动机,满足条件的ψq是转子磁链ψr。通过数学推导,可以获得定子磁链、转子磁链及电磁转矩关系为

式中,ψr为转子磁链矢量,Rr、Lr分别为转子电阻及自感,M、Ls分别为电机互感及定子自感,s为拉氏变换算子,ωr为转子转速,δsr为定转子磁链之间夹角。
从式(4)可见,由于转子磁链为一阶惯性环节,在一个数字控制周期内,完全可以认为转子磁链在空间静止。这样根据式(5)可见在定子磁链幅值恒定情况下,快速控制定子磁链的旋转方向及旋转角度的大小即可快速控制电磁转矩。将式(5)与式(2)比较可见二者形式完全一致。
2.2 电励磁同步电动机
电励磁同步电动机转子上一般设置阻尼绕组,其作用为:①阻止和衰减转子的自由振荡;②产生异步起动转矩以帮助电动机起动;③在非对称运行时,削弱磁场的负序分量,从而削弱高次谐波电流幅值的作用[5]。
由于阻尼绕组对气隙磁场变化具有阻尼作用,同时这种电动机转子上的励磁绕组和阻尼绕组均会产生磁场,通过气隙与定子磁场作用产生电磁转矩,所以满足条件的ψq是气隙磁链ψm。数学推导可得电流、定子磁链、气隙磁链及电磁转矩关系为
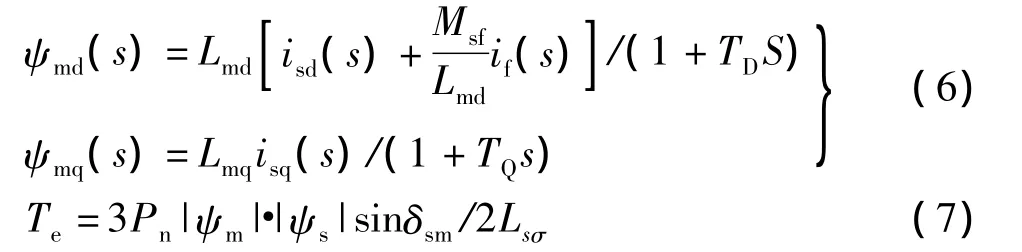
式中,TD为直轴阻尼绕组自感时间常数;TQ为交轴阻尼绕组自感时间常数;Lmd、Lmq分别为主电感;Msf为定转子互感;ψmd、ψmq分别为气隙磁链dq轴分量;isd、isq分别为定子电流dq轴分量;if为转子励磁电流;Lsσ为定子漏感;δsm为定子磁链矢量与气隙磁链矢量夹角。
从式(7)可见,有阻尼绕组电励磁同步电动机中电磁转矩在受到转矩角δsm控制的同时,还受气隙磁链幅值的变化影响。但由于阻尼绕组较大的自感时间常数原因,根据式(6)可以看到,由于阻尼绕组的阻尼作用,能使定子电流、转子励磁电流引起气隙磁链的变化变得缓慢,其中包括幅值和辐角的变化。在几个控制周期内,气隙磁链矢量相对于转子dq旋转坐标系而言空间位置基本不动。快速控制定子磁链幅值、旋转角度及方向即可快速控制电磁转矩。将式(7)与式(2)比较可见二者形式完全一致。
2.3 永磁同步电动机
永磁同步电动机转子上一般没有阻尼绕组,利用转子上的永磁磁钢产生恒定磁场与定子磁场作用产生电磁转矩。满足条件的ψq是转子磁极磁链ψfs。数学推导可得,定子磁链、转子磁链及电磁转矩关系为

其中,Ls为定子电感。
由于无论在动态还是在稳态,转子磁极磁链ψfs均随转子同步旋转,其旋转的动、静态特性完全取决于转子的机械时间常数。众所周知,相对于电动机的电气时间常数,转子的机械时间常数很大。所以转子磁极磁链ψfs是一个大惯性环节,与异步电动机中转子磁链、电励磁同步电动机中气隙磁链不同,理想情况下ψfs的幅值不随电动机运行工况变化而变化,始终为恒定值。同样,快速控制定子磁链幅值、旋转角度及方向即可快速控制电磁转矩。将式(8)与式(2)比较可见二者形式完全一致。
3 电压矢量对定子磁链的控制
通过前面转矩和磁链关系分析,我们得知在定子磁链幅值为恒定值情况下,只要快速控制其旋转方向及旋转角度即可实现定转子双边绕组的交流电动机电磁转矩。那么以何种手段能够迅速控制定子磁链?
对于任何一种交流电动机,定子端电压矢量us、定子磁链矢量ψs在忽略定子电阻压降情况下满足如下等式关系:

这说明定子磁链矢量ψs完全受控于电动机端电压矢量us。图2给出了逆变器输出电压矢量两个分量对定子磁链的旋转及幅值的控制效果图。

图2 电压矢量控制定子磁链矢量示意图
由于逆变器电压矢量us中usy的作用迫使定子磁链矢量由ψsk-1旋转到ψsk位置,由于usx的作用迫使定子磁链矢量幅值增加约为Δψsx。从图2中电压矢量对定子磁链矢量的作用可见,无论定子磁链矢量旋转方向、旋转角度和矢量幅值均可以利用逆变器输出电压矢量进行控制。
4 教学实践经验
为了使学生深刻理解以上内容,在讲授过程中需注意如下问题。
(1)在讲授异步电动机转矩和磁场关系时,可以采用Matlab仿真手段对定转子磁链轨迹进行仿真,从而加深学生对两种磁链性质的理解。例如定子磁链采用六边形的DTC控制策略驱动系统稳态时磁链轨迹仿真结果如图3所示。尽管定子磁链轨迹控制为非圆形,而由于转子磁链为一阶惯性环节,具有低通滤波特性,实际的转子磁链轨迹却为标准的圆形。图3(a)定子磁链轨迹和图3(b)转子磁链轨迹的比较充分说明了转子磁链为一阶惯性环节这一特点。
(2)由于电励磁同步电动机结构复杂,且“电机学”课程中对该电机介绍较少,所以导致学生对转子阻尼绕组作用及其性质理解困难。在讲授该种电动机转矩和磁场关系时,可以采用有阻尼绕组和无阻尼绕组两种电动机气隙磁场仿真结果对比方法说明阻尼绕组对气隙磁场作用。例如典型的有阻尼绕组和无阻尼绕组两种电动机负载稳定情况下转速突变过渡过程中气隙磁链仿真如图4所示。
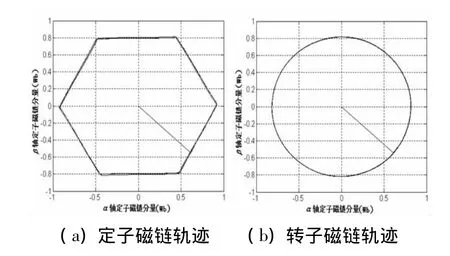
图3 异步电动机DTC系统定转子磁链轨迹比较
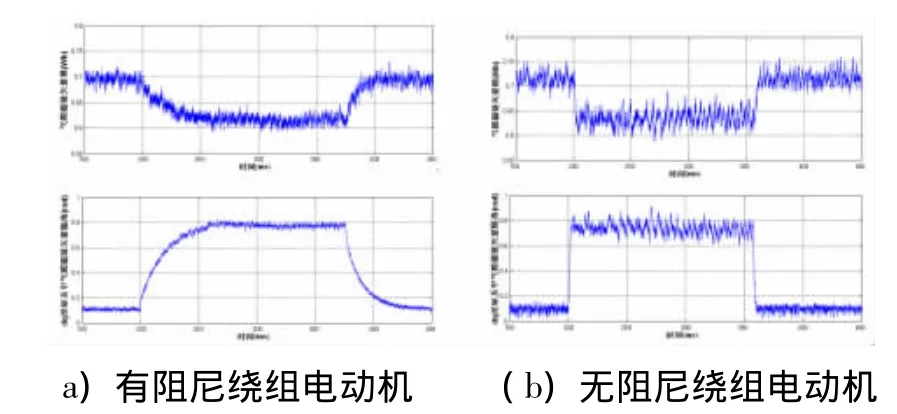
图4 电动机动态中气隙磁链变化对比
从图4(a)可见,电动机由于阻尼绕组的作用,在200ms处气隙磁链矢量模及辐角经过70ms才达到各自的稳态值;而从图4(b)中可见在无阻尼绕组电动机中,在200ms处气隙磁链矢量模及辐角仅需2ms就达到各自的稳态值。图4的对比仿真证明了上述有阻尼绕组同步电动机气隙磁链性质分析的正确性,相对于几十μs的控制周期而言,动态中气隙磁链变化很缓慢。快速控制定子磁链幅值、旋转角度及方向即可快速控制电磁转矩。
(3)在讲授上述内容时,一定要抓住“动态”这一分析概念。在分析各种交流电动机直接转矩控制理论时一定要站在“动态瞬间”进行。而且在分析电压矢量对电磁转矩控制效果时忽略定子磁链幅值变化因数。
(4)可以采用多媒体教学手段展示各种交流电动机结构,用动画手段展示各种磁场动态。
5 结语
交流电动机电磁转矩与磁场关系是学生理解其DTC控制策略的理论关键,也是“交流调速系统”课程教学重要内容之一。本文从各种电动机电磁转矩和磁场关系统一性角度,向学生讲解了各种电动机DTC策略中转矩控制的统一性,加深了学生对DTC理论理解。
[1] I.Takahashi,T.Noguchi.A new quick-response and high-efficiency control strategy of an induction motor[J] .IEEE Transaction on Industry Applications,1986,22(5):820-827
[2] Zhong L,Rahman M F,Hu Y W,et al.Analysis of direct torque control in permanent magnet synchronous motor drives[J] .IEEE Transaction on Power Electronics,1997,12(3):528-535
[3] 周扬忠.电励磁同步电动机直接转矩控制理论研究及实践[D] .南京,南京航空航天大学,2006,11
[4] Pyrhonen J,Niemela M.Test results with the direct flux linkage control of synchronous motors[J] .IEEE AES Systems Magazine,1998(4):23-27
[5] 王瑾.飞机无刷发电动机及电压调整技术研究[D] .南京,南京航空航天大学,2000
猜你喜欢
上海大中型电机(2021年1期)2021-06-09 09:12:04
防爆电机(2020年4期)2020-12-14 03:11:08
防爆电机(2020年3期)2020-11-06 09:07:30
电子制作(2017年1期)2017-05-17 03:54:12
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年10期)2016-04-12 00:26:38
电测与仪表(2016年2期)2016-04-12 00:24:42
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
云南电力技术(2015年2期)2015-08-23 01:31:52
