
多站制CW雷达目标动态模拟器设计
2012-09-28 07:49李华敏李晓松
电讯技术 2012年1期
李华敏,王 瑛,李晓松
(1.解放军91550部队,辽宁 大连116023;2.中国西南电子技术研究所,成都 610036)
1 引 言
多站连续波(Continuous Wave,CW)测量系统是由多套分布在远端站点的CW雷达组成,经合理布站在飞行试验空域建立起高精度测量带。试验任务前,各CW雷达必须保证设备技术性能达标和系统上下行信号协调。无论CW雷达是在内场设备维护保养还是在远端站点任务准备,都需要为CW雷达系统提供目标联试信号,用于检测雷达跟踪测量动态性能。实际上,在雷达设备的研制过程和设备调试维修中,也希望有一种能够模拟目标飞行的动态信号生成设备,模拟产生目标回波作为雷达系统捕获、跟踪和测量性能检测信号,以及时发现雷达系统问题和隐患,特别是对多站连续波测量系统的联试更具有意义[1]。在雷达跟踪测量性能测试中,使用真实目标为雷达提供回波信号是不切实际的,为了满足单站CW雷达动态性能检查和多站连续波测量系统动态模拟联试需求,CW雷达目标动态信号模拟器的研制十分必要。
2 系统设计
2.1 系统方案与原理
多站连续波测量系统由3套多站制CW雷达组成,各部CW雷达分别以主站、副站1、副站2模式工作。CW雷达目标动态模拟器(简称模拟器)以本地站址为参考点,将事先给定的弹道数据转换为目标模拟的控制信息;模拟器以时统信号为基准,由模拟信息控制生成目标回波射频信号。各CW雷达站间的时间同步通过中心时统DC码实现,站内的雷达设备和模拟器时间同步在本地时间基准上。在指控中心T0信号控制下,各CW雷达站启动模拟程序,生成射频信号馈送给雷达接收;雷达解调得到的距离、速度、角度等信息,通过数传设备送往指控中心;指控中心接收处理各雷达站的数据,形成测量方案显示出模拟目标的运行轨迹。
CW雷达与模拟器设计为有线射频闭环方式工作,雷达发射机送来的信号耦合至模拟器接收端;模拟器对该信号模拟处理后,从其射频输出口馈送至雷达高频接收机。CW雷达模拟器主要工作是从雷达的上行信号中解调出测量信号,根据弹道数据对其进行测距信号延时和多普勒频移处理,生成携带目标运动信息的射频信号馈入雷达,使雷达实现对目标动态模拟跟踪测量。
2.2 CW雷达模拟器组成
CW雷达模拟器的硬件部分由功分器、信号处理分机、信道分机、频率源等设备组成,其组成框图如图1所示。
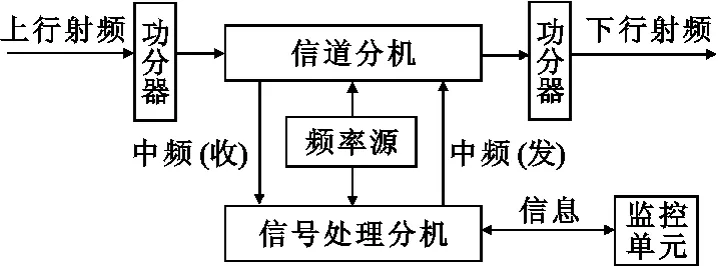
图1 CW雷达模拟器组成框图Fig.1 Block diagram of CW radar simulator
模拟器与雷达间的射频信号交换是通过功分器耦合实现的。模拟器信道分机将接收到的雷达上行信号转换为中频(收)信号,为其信号处理分机提供中频目标信号;同时,信道分机将信号处理分机输出的中频(发)信号变换为射频信号,为雷达提供目标回拨射频信号。
信号处理分机以CPCI工控计算机为平台,硬件设备主要由调制器单元、信号处理板、计算机主板等组成。调制器单元负责调制度大小的调整、信号的输出、站型选择等;信号处理板负责距离和速度信号的模拟处理;CPCI工控计算机负责完成信息处理和监控以及雷达监控分系统的通信;高稳频率源为信道分机和信号处理分机提供高稳定度的频率信号基准。
模拟器监控软件运行在CPCI工控计算机上,根据弹道数据文件产生固定格式的距离、速度、加速度、角度、角速度等数据,并将目标距离、速度、加速度数据转发到信号处理分机,用于距离和速度模拟;将角度、角速度等数据转发到伺服天线控制单元(ACU),用于角度模拟控制。雷达ACU接收角度控制量,驱动天线转动,并将当前角度、距离和速度等信息通过雷达监控分系统送往指控中心。
2.3 关键技术
多站制CW雷达模拟器信号流程如图2所示。

图2 模拟器信号流程图Fig.2 Flow chart of simulator signal
模拟器研制过程中有3个关键技术重点:一是多站工作模式;二是距离变化与速度相关性模拟;三是模拟目标远近对应信号电平强弱的模拟。
为了满足多站制CW雷达3种站型使用要求,模拟器需要对连续波测量系统的3个CW雷达上行频率(fR1,fR2和fR3)信号进行相应的变频处理,进而实现模拟器可以在3种站型下工作。模拟器的信道分机通过对雷达上行射频信号进行两次下变频,变为对应站型的中频信号送到信号处理分机进行模拟处理,使得模拟器的工作站型与其对应CW雷达的工作站型相一致。
CW雷达对目标距离与速度的测量是通过两种独立方法实现的,目标距离与速度值之间存在必然的联系。模拟器根据提供的弹道数据对解调信号进行距离延时和速度模拟处理。依据时间基准和速度模拟信息,通过控制相应站型的载波频率,实现目标速度的模拟。对于距离模拟信息,在时间基准同步下,通过控制侧音信号的相应延迟时间,同时进行多普勒补偿与修正,实现对距离变化模拟和速度变化的一致性调整。
目标远近对应信号强度变化的模拟是依据距离值和自动增益控制(AGC)电平值,通过控制数控衰减器来模拟目标信号的强弱。模拟处理后的信号调制在下行中频载波上,发送给模拟器信道分机,由信道分机将信号进行两次上变频为射频信号 fT送往雷达。监控单元提供角度信息,传递给雷达ACU,控制天线按照预定轨迹运行。
3 信道分机
为了便于信号模拟处理,模拟器信道分机需将接收到的雷达发射信号转换成“收”中频信号,提供给信号处理分机;同时将经信号处理分机动态模拟处理后的“发”中频信号,变频转换为射频信号馈送雷达接收。
模拟器信道分机由接收模块、发射模块、本振模块、数控衰减器、监控单元和电源等组成。接收模块主要由预选器、低噪声放大器(LNA)、混频器、AGC放大器等组成,发射模块主要由低噪声放大器(LNA)、混频器、滤波器、数控衰减器等组成。监控单元完成各模块状态参数的监控,并通过以太网接口与信号处理分机通信。数控衰减器用于控制输出信号电平,模拟目标信号的强度。
CW雷达3种站型对应的上行信号fr1、fr2、fr3进入信道分机,经预选器、低噪声放大器进入混频器。根据输入信号的特性选择频综频率,分别将fr1、fr2、fr3变频到中频;该中频(收)信号 fr经过滤波、AGC放大,经衰减输出到信号处理分机。在信号处理分机中,完成目标动态模拟相关的信号处理,形成中频“发”信号ft送入信道分机经过两次上变频后输出,为雷达提供目标回波射频信号。
4 信号处理分机
4.1 调制器单元
调制器单元是模拟器信号处理分机的重要组成部分,受DSP单元的控制,接收模拟测距信号和模拟速度信息,按照不同的站型,将测距音加调到不同的副载波或者载波上,将速度信息加入载波多普勒频移存储器中。
CW雷达有主、副站型之分,信号格式不完全一样,主站信号为相参转发,两个副站信号为非相参转发。对于主站,模拟测量后的测距信号直接调相(PM)加调在载波上;模拟的速度信息体现在载波的多普勒频移上,经数模(D/A)变换后输出控制载波频移。对于副站,经模拟处理后的测距信号,先分别调制在两个不同的带多普勒的副载波上,再调制在带多普勒的下行中频载波上;模拟的速度信息体现在载波的多普勒频移上,经D/A变换后输出。调制度大小的调整、信号的输出和站型选择均在大规模FPGA数字芯片中完成。
4.2 数字信号处理单元
数字信号处理(DSP)单元是模拟器信号处理分机的重要组成部分,主要完成距离、速度的模拟和中频信号锁定等功能。为了提高信号处理实时性,同时兼顾信号软件化处理算法的复杂程度,采用TMS320C6713作为模拟器DSP处理核心。该芯片是TI公司推出的高性能浮点数字信号处理器,采用先进的超长指令字结构,内部有8个独立功能的运算器,每周期可以执行8个32位指令[2]。
为了模拟目标的距离远近、速度大小、入射电波与天线电轴的方位、俯仰角度偏离量和接收信号的强度等参数,DSP单元根据监控单元送来的模拟数据,计算出对接收单元的载波锁定、测距侧音解调、距离、速度、角度的具体控制量。模拟距离的变化是通过控制测距信号的时延实现的,最大时延和时延精度控制决定了距离的模拟范围和距离模拟精度。需要考虑径向速度多普勒频移的影响,要从载波锁相环解出侧音后,必须加上折算到侧音上的多普勒补偿频率,以使距离与速度保持相关[3]。
目标距离的模拟首先将雷达的测距信号采样存入双口RAM中,根据目标距离对应的时延值控制测距信号的提取,进而达到目标距离的模拟[4]。因为运动目标距离与速度是相关的,因此对上行测距侧音除了延时处理外,还要加上行多普勒频移引起的距离的变化量;下行侧音要与副载波一起加下行多普勒频移修正量,以使距离与速度保持相关。测距侧音延时处理后,调制在带双向多普勒频率的中频载波上,通过信道分机变换为携带目标距离信息的射频信号。
CW雷达测速是通过测量收、发信号的载波多普勒频移实现的,因此速度模拟就可以通过改变转发信号的载波频率实现;而加速度模拟时,只要控制载波在一定范围内按照给定的速度扫描即可实现。在信号处理模块中,载波由直接数字频率合成器(DDS)产生,通过改变DDS频率控制字和频率变化速率,改变转发载波的频率和扫描速率,其精度可以达到很高[5]。
4.3 监控软件
模拟器监控软件运行在CPCI工控计算机上。作为CW雷达模拟器的监控管理控制程序,它主要完成对信道分机和信号处理分机状态参数的实时监视、控制及管理;接收CW雷达系统监控台的弹道数据,管理系统模拟所需的弹道数据;接收雷达系统监控台或指控中心的模拟启动命令;负责弹道数据本地坐标转换,具备模拟数据处理、各分机参数状态监控、模拟演示、训练等功能。
5 结语
多站制CW雷达目标动态模拟器设计兼顾了两组频点3个工作站型,为多站连续波测量系统目标模拟联试提供了目标动态信号产生设备。在单套雷达设备联调中,模拟器提供目标飞行动态的回波信号,使雷达形成上、下行信号闭环,距离模拟误差小于7 m,速度模拟误差小于0.01 m/s,满足CW雷达动态性能测试要求。在多站连续波测量系统模拟联试中,远端站点的CW雷达接收同步时间信号和启动命令,模拟器为对应CW雷达提供目标动态回波信号,实现了多站测量系统的准动态模拟联试。
设计中采用固态化、数字化与软件化技术,设备的集成度高,减少了器件之间的相互连接。模拟器可方便地介入或脱离雷达系统工作,在雷达动态性能检测和多站连续波测量系统模拟联试中起到了重要作用。
[1]刘嘉兴.飞行器测控通信工程[M].北京:国防工业出版社,2010.LIU Jia-xing.Spacecraft TT&C and Communication Engineering[M].Beijing:National Defense Industry Press,2010.(in Chinese)
[2]Texas Instrument Corp.TMS320C6713 data sheet[M].Texas:Texas Instrument Corporation,2001.
[3]Bassem R Mahafza.雷达系统分析与设计[M].2版.陈志杰,罗群,沈齐,译.北京:电子工业出版社,2008.Bassem R Mahafza.Radar Systems Analysis and Design Using MATLAB[M].2nd ed.Translated by CHEN Zhi-jie,LUO Qun,SHEN Qi.Beijing:Publishing House of Electronics Industry,2008.(in Chinese)
[4]张永伟.一种新型雷达模拟器的设计[J].舰船电子对抗,2008,31(2):56-59.ZHANG Yong-wei.Design of a kind of new radar simulator[J].Shipboard Electronic Countermeasure,2008,31(2):56-59.(in Chinese)
[5]刘琪芳,姚金杰.基于DDS技术的多普勒信号模拟器设计[J].计算机测量与控制,2010,18(1):144-149.LIU Qi-fang,YAO Jin-jie.Design of Dopple Signal Emulator Basedon DDS Technology[J].Computer Measurement&Control,2010,18(1):144-149.(in Chinese)
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
科学与信息化(2021年6期)2021-01-04
电子制作(2018年23期)2018-12-26
铁道通信信号(2018年9期)2018-11-10
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
