12缆物探船电力推进系统研究
2012-09-27 08:31:26张舒蓉
船舶与海洋工程 2012年2期
张 舒 蓉
(708研究所,上海 200011)
1 电力推进概述
“海洋石油720”是一艘由柴电推进系统驱动的12缆大型物探船,主要从事海上三维地震采集作业,即勘查地下矿产、研究地质构造。12缆物探船推进装置有3种,分别是位于船尾的长轴可调桨,船首的可伸缩全回转推进器和艏侧推。
艉部的长轴可调桨为2个,分别由2台变频电机驱动。每台变频电机功率为4500kW,由24脉冲水冷型变频器驱动;艏部的全回转推进器由一台1500kW的电机驱动,艏侧推由一台1200kW的电机驱动。配置的4台柴油发电机组组成主电站,每台柴油发电机组功率为4200kW 3~6.6kV 50Hz,向三相三线绝缘6.6kV 50Hz中压电网供电。中压电网通过3~6.6kV/440V 50Hz配电变压器向低压电网供电,配电变压器容量为2500kVA。单线图见图1。
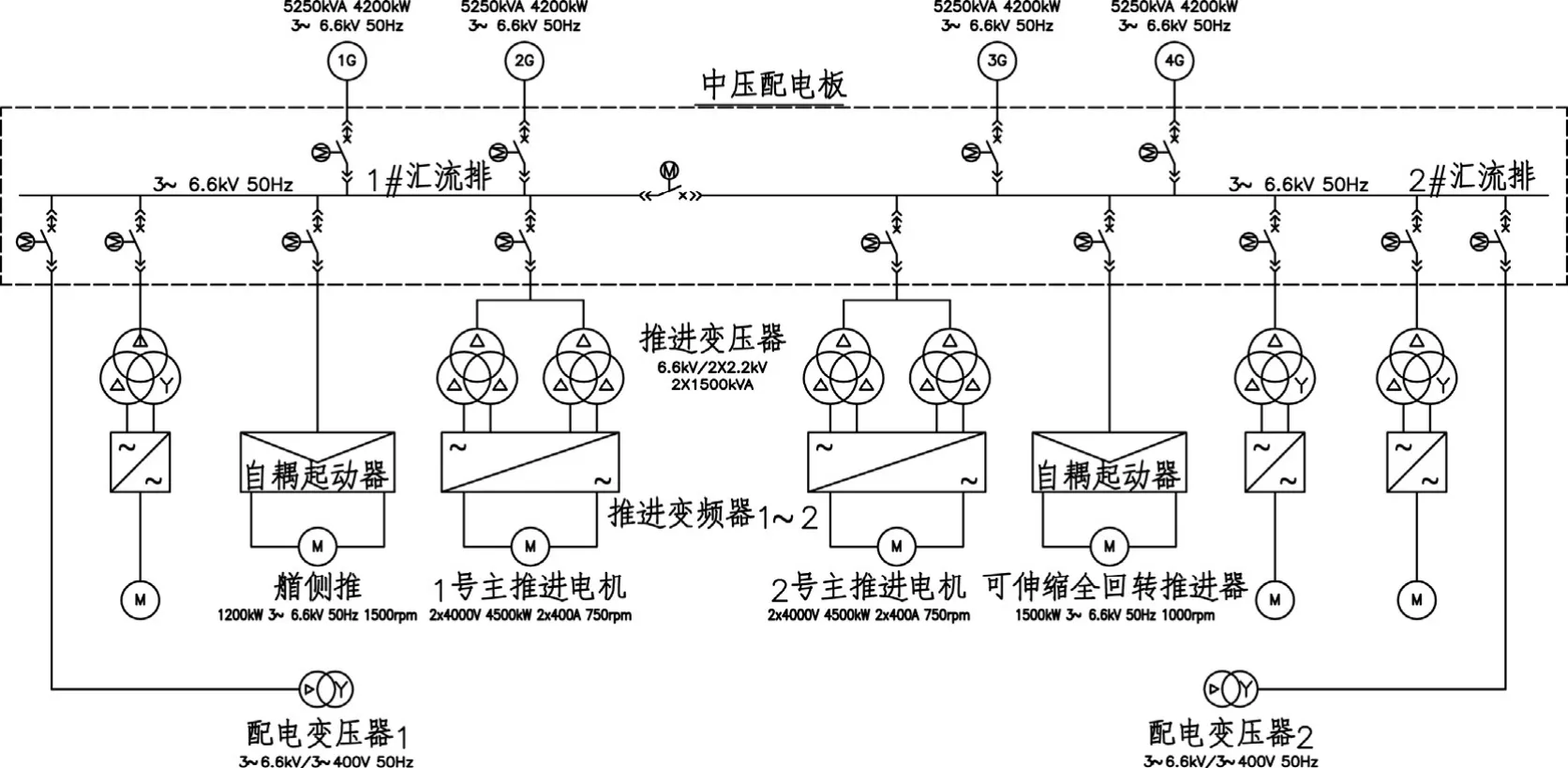
图1 12缆物探船单线图
中压配电板汇流排和低压配电板汇流排均分成两段,发电机和主推进器分别挂在中压配电板的两段汇流排上。正常航行和作业时联络开关合上,发电机以最佳数量投入运行。某段汇流排发生故障时,剩下的那段汇流排及其供电的主推进器依旧正常工作。因而,电力推进系统在12缆物探船的应用将带来的益处很多[1,2]。
1.1 噪音低
12缆物探船长期作业在外,船员和特殊作业人员居住环境的舒适度非常重要。船舶采用电力推进系统,振动小、噪音低,可以营造一个良好的居住环境。另外,主推进变频器和主推进电机都采用水冷型,省去了大风机,也有利于降低船上噪音。
1.2 重量轻
12缆物探船是利用地震勘探技术从事调查作业,也可以称为地震船。作业甲板分为炮缆甲板和电缆甲板两层。作业甲板高度高,且安装在甲板上的作业设备重量重,控制空船重量很重要。采用电力推进技术,发电机重量比主机小,可以使全船总重量减少。船舶电站采用中压系统,电缆载流量变小,电缆重量相应也减少了,有助于船舶总重量的减轻。
1.3 布置灵活
12缆物探船作业设备占用空间大。该船自持力75天,储油舱占用空间也大。采用电力推进系统后,推进电机和电站之间的一系列设备通过电缆连接,可以分开布置在合适的地方,空间利用最大化。见图2。
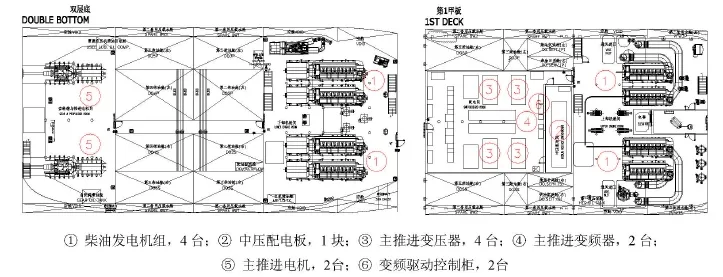
图2 电力主推进系统部件布置
1.4 响应快,航线控制精准
12缆物探船数据采集效率越高,每航次的作业收益也就越高。采用电力推进技术后,船舶航线操纵比海油公司原来的8缆物探船精准,数据采集漏点率下降,不再需要对同一区域进行多次重复作业来补全数据,从而提高作业效率并降低设备折旧率。
1.5 节能减排
12缆物探船设计航速为16kn,拖带作业航速5kn。对于长期在低负荷状态下运行的船舶,电力推进系统比常规推进合理。发电机按照负载量运行,不需要在所有时间投入全部4台发电机。自动电站管理系统在线监视汇流排上的负载量,负载量高时,自动起动备用发电机;负载量低时,减少运行的发电机数量。这样,发电机保持在最佳容量和最佳效率上运行。电站电能分配的灵活性,日积月累下可降低油耗,减少废气排放量。
2 主推进驱动系统
12缆物探船主推进驱动系统有2套,每套由2台三绕组变压器、1台主推进变频器、1台鼠笼式感应推进电动机(双绕组系统)及辅助设备组成。
主推进变频器型号为SIEMENS SINAMICS GM150,水冷型,采用脉宽调制技术(PWM),逆变器选用绝缘栅双极型晶体管(IGBT),进线侧通过2台移相变压器提供24脉冲系统,以减少电网谐波。PWM型变频器,系统电源输出频率范围宽;功率和转矩动态响应小于10ms;转矩能够平滑输出;任何负载状况下功率因数可达0.95左右。主推进变频器具有接地故障监测功能,对主推进变压器次级绕组和主推进电机定子绕组进行绝缘监测。作为水冷型变频器,还配备漏水探测器、水温传感器和空气温度传感器,确保变频器在正常工作温度范围内运行。主推进变频器外观布置见图3,技术参数见表1。
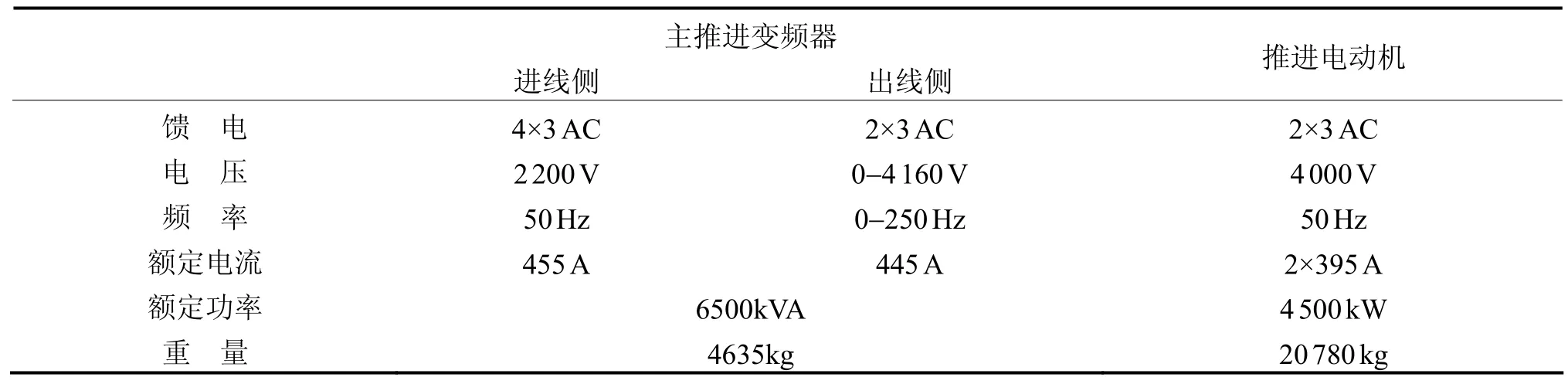
表1 主推进变频器和推进电动机主要技术参数
2套主推进驱动系统共有4台三绕组变压器,为水冷型。主要技术参数如表2。

表2 4台三绕组变压器的主要技术参数
每一套主推进驱动系统配备各自独立的控制系统,控制推进系统所有的主要部件和相关辅助设备。就地/应急控制时,所有的控制功能不受船舶其他控制系统影响,譬如监测报警系统。主推进驱动控制系统是两级控制系统,分变频器控制系统和推进控制系统。
变频器控制系统主要功能有产生IGBT的触发脉冲,监测IGBT,过压/欠压保护,过流和短路保护,超速监测,直流母排过流保护,失速控制,变频器功率部分监测和主开关合闸/分闸等。变频器控制系统组合在变频器柜中,即图3 中的变频器控制柜部分。
图2中的变频驱动控制柜即为推进控制系统,控制推进变压器、推进变频器、推进辅助设备、推进电动机、就地/遥控模式转换,以及与可调桨控制系统、功率管理系统等的接口。最终推进控制系统把速度设定信号发送给变频器控制系统,产生转矩控制需要的电流设定信号。
推进控制系统的安全保护功能实时监测推进驱动系统的运行状态,必要时会发出警报、减速和停车命令,或起动闭锁或禁止,确保系统和其部件的安全。减速时,推进变频器输出电流限定在额定值的70%;停车时,变频器立即停止输出并断开主开关,除非停车越控功能被动作。
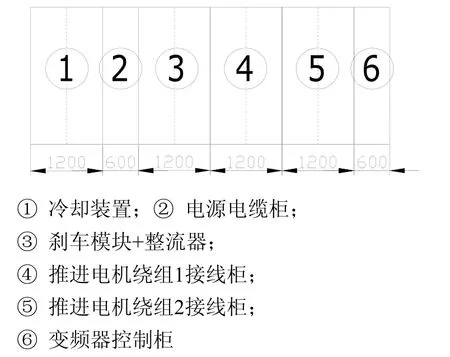
图3 推进变频器外观布置
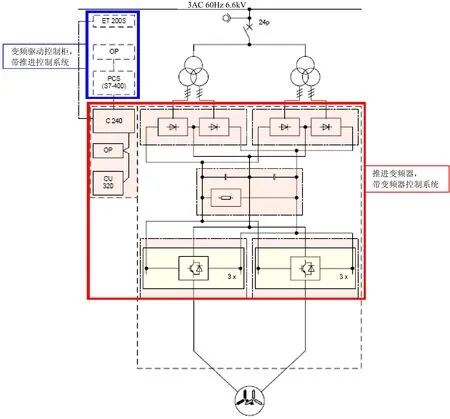
图4 主推进驱动控制系统
推进控制系统通过图4中的ET200S模块,收集推进和电力系统的所有相关信息,例如电网电压和频率、每台发电机的有功功率和无功功率等。通过监控这些数据,可以把推进功率限定在电站可用功率以内,防止任何一台发电机过载;在电站发生严重故障,例如几台发电机同时跳闸,余下的发电机因承担推进功率短时高过载时,使推进系统减速、降低负荷的输入功率要求,实现防失电功能。
3 变频驱动可调桨遥控系统[3]
12缆物探船每个变频主推进电机通过一个减速齿轮箱驱动一个可调螺距螺旋桨。每个变频驱动可调桨遥控系统有3种控制模式:
1) 恒速(CRPM)模式:转速为全速不可调,螺距可调,只有螺距手柄可用。
2) 组合(COMBINATOR)模式:转速和螺距都可调组合输出, 只有螺距手柄可用, 螺距手柄输出转速和螺距两个信号。
3) 变速(VARIABLE SPEED)模式:转速和螺距都可调分别输出, 螺距手柄和转速手柄都可用。该种模式下,船东要求速度变化率总是快过螺距变化率;操纵杆作用下船舶方向前进后退或者后退前进快速变化时,速度命令变化只与操纵杆设定值的绝对值相关,而无需把船速降到零。
在驾驶室和集控室的控制板上都可以进行3种控制模式选择。变频驱动可调桨遥控系统控制板布置见图5。遥控控制位置(集控室/驾驶室/两桥楼)的转换可在控制板上进行。
驾驶室或者集控室控制位置的选择只能在集控室控制板上进行。集控室控制板和驾驶室控制板上均有控制位置指示灯。但在应急状况或者变频驱动可调桨遥控系统故障进一步加大的状况下,可以把控制切换到备用控制模式,此时在集控室或者驾驶室都可以进行控制位置选择。集控室控制板上可以设置负载限定值。左右两个主推进可调桨各拥有一个变频驱动可调桨遥控系统,该2个遥控系统完全相同,并在这一控制层面上相互独立。
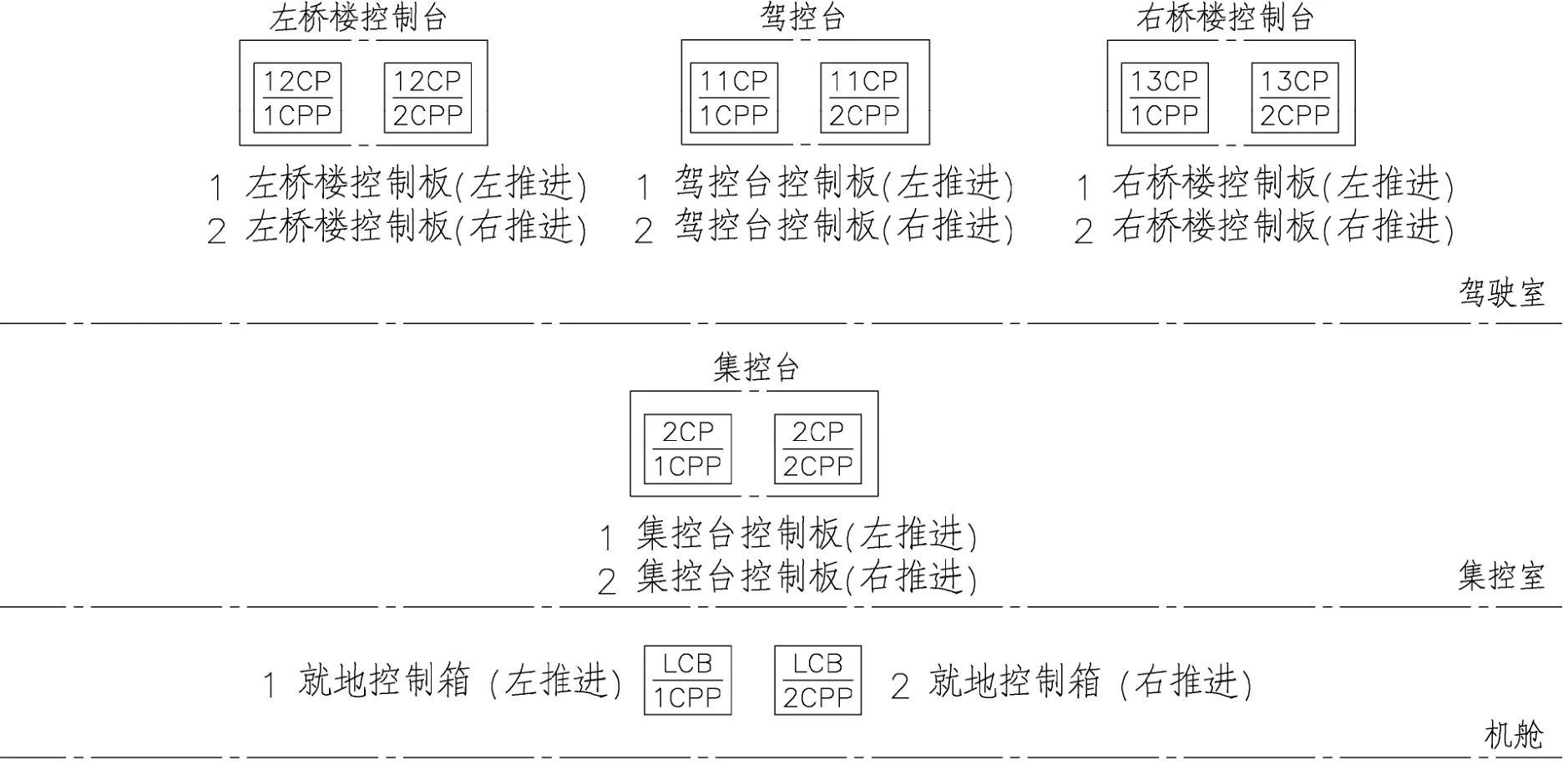
图5 变频驱动可调桨遥控系统控制板布置
4 联动控制系统JS(JOYSTICK)[4]
12缆物探船配有联动控制系统,可以对2个主推进可调桨、一个可伸缩全回转推进器和一个艏侧推进行联合控制。联动控制板见图6。
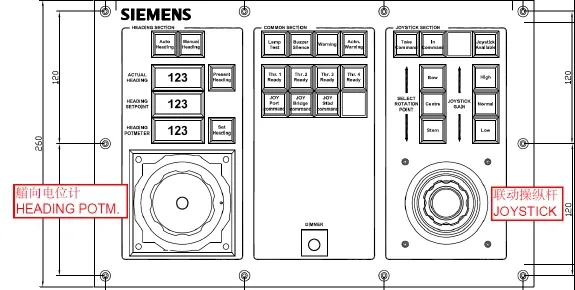
图6 联动控制板
联动控制系统可以设定3个转动中心,分别是船首、船中心和船尾。
联动控制有3种响应模式,分别是正常(NORMAL)、高(HIGH)、低(LOW)。正常模式下,JS操纵杆的动作和推力器作用力之间以线性关系相互对应,而高/低模式下为非线性关系,见图7。高模式相比正常模式,船舶对JS操纵杆的动作响应快;低模式下,船舶对JS操纵杆的动作响应速度由操纵杆动作的大小决定,操纵杆的动作小则推力器响应慢,反之推力器响应快。
联动控制器连续计算船舶被要求的推力和转动惯量,计算后把各自分配到的推力命令送到工作中的每个推力器和螺旋桨。算法确保最小功率消耗下,最佳推力器/螺旋桨使用效果。联动控制器中的数学模型可以在环境条件对船舶的作用力作出补偿;也可以在各个推力器一起动作时,对推力器-船体作用力、推力器-推力器作用力进行补偿。
在联动控制层面上,2个变频驱动可调桨遥控系统可以相互作用。联动要求从驾驶室的联动控制板发出。当变频驱动可调桨遥控系统完好无故障时,驾驶室为主推进可调桨当前控制位置;且变频电机驱动系统正常,变频驱动可调桨遥控系统才能应答接收到的联动控制要求。此后2个主推进可调桨转换到联动控制系统控制,同时可调桨遥控系统不再进行控制。
可伸缩全回转推进器(RT)和艏侧推(BT)位于船首,均通过自耦变压器方式起动。全回转推进器控制板和艏侧推控制板布置见图8。当取消联动控制模式时,4个螺旋桨由各自的控制板分开控制。
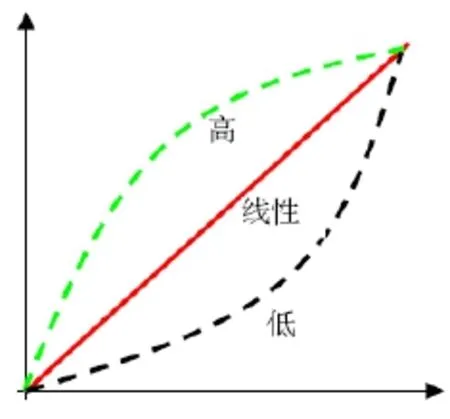
图7 联动控制增益曲线

图8 RT和BT控制板布置
5 结 语
12缆物探船采用电力推进形式,能满足多种工况包括作业和航行的需求。虽然船舶生命周期花费较大(the life cycle cost – LCC)包括设备采购、安装、调试、运营和燃油消耗、维护,以及丧失或者推迟作业。但从12缆物探船投入运营半年来看,以及与海油公司原有的物探船相比,该船动复原时间减少、作业效率提高,数据采集量不断创新高。
[1] Alf Kare Adnanes, Asgeir J.Sorensen, Thomas Hackma. Essential Characteristics of Electrical Propulsion and Thruster Drives in DP Vessels[R]. 1997.
[2] Vacon AFE Units Onboard the World’s Largest Seismic Research Ship[R].
[3] Technical Description Propulsion Control System NORISTAR 2000[R]. Drawing No. 74.112, Issue: 2008.
[4] SIEMENS. Standalone Joystick Standard Documentation, System Description[S]. 2009.
猜你喜欢
日用电器(2023年7期)2023-09-07 00:41:56
军民两用技术与产品(2022年10期)2022-11-30 07:13:16
内江科技(2022年3期)2022-03-30 10:24:50
橡塑技术与装备(2021年5期)2021-03-16 06:43:48
电子制作(2019年23期)2019-02-23 13:21:22
机械工程师(2018年7期)2018-07-30 09:05:26
火控雷达技术(2016年2期)2016-02-06 02:28:54
中国卫生标准管理(2015年4期)2016-01-14 05:43:52
深空探测学报(2015年3期)2015-12-07 11:14:55
太空探索(2015年6期)2015-07-12 12:48:42