遮风板角度控制系统设计及优化
2012-09-26 02:26:38张永红高晓梅
电子设计工程 2012年7期
张永红,高晓梅
(1.西安航空职业技术学院 教务处教材实践科,陕西 西安 710089;2.西安航空职业技术学院 计算机工程系,陕西 西安 710089)
遮风板控制系统,通过对风扇转速的控制,调节风力大小,改变遮风板转角 θ,显示范围为 0~60°,分辨力为 2°,绝对误差不大于5°;当间距d=10 cm时,通过操作键盘控制风力大小,控制遮风板转角θ,要求控制过程在10 s内完成,如图1所示。
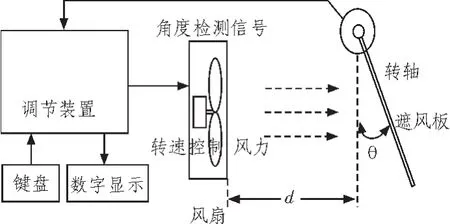
图1 遮风板控制系统示意图Fig.1 Structure diagram of angle control system of wind board cover
1 方案的确定
遮风板控制系统主要由单片机控制及显示模块、角度信息采集模块、电机驱动模块、A/D采样模块、电源模块等构成。
1)角度信息采集模块 光电对管测量分辨率低,工作繁琐且工艺要求高;电位器测量角度,归零方便,但精确度不够高,调节难度大,温漂较大。采用MMA7260Q-3轴小量程加速传感器具有低功耗、低噪音、分辨率高精度高且能多角度调节。
2)电机驱动模块 采用NEC公司电机控制ASSP芯片MMC-1配合L298N,MMC-1为多通道两相四线步进电机/直流电机控制芯片,基于NEC电子16位通用MCU固化专用程序实现,通过VART或SOI串行为主控MCU扩展专用电机控制功能,可以实现直流电机的正反转控制和速度控制256档,并具备过流检测功能,工作电流2 A,可同时带动两个直流电机或一个步进电机。
3)A/D采样模块 采用TLC2543CN将角度信息的模拟量转化为数字信号,TLC2543CN是TI公司的12位串位模数转换器,使用开关电容逐次逼近技术完成A/D转换过程,且其串口输入能节省51系列单片机I/O资源,性价比、分辨率都极高。
4)控制系统的选择 采用STC12C5A60S2作为主控器,STC系列单片机是红星科技生产单时钟、机器周期(IT)单片机,是高速、低功耗、超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,自带A/D PWM。
5)显示模块选择 采用TFT彩屏进行角度的显示,彩屏性能稳定、单位解析度高,可以完成文字、图形的显示,画面生动,人机界面友好。
2 分析与计算
本设计可实现角度的采集和角度的实时显示,以TFT彩屏显示角度的数值,传感器采集角度信息通过单片机进行PID运算。采用MMA7260Q-3轴小量程加速传感器采集角度信息,通过12位A/D转换器TLC2543CN将模拟信号转换为数字信号,经运算后在TFT显示出角度值。当采集的角度信息与预设值不符合时,单片机会进行PID运算,控制电机调节风速,进而调节遮风板转角。
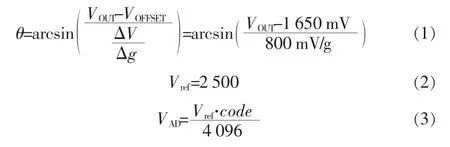
角度的计算:
3 电路系统的构成
遮风板控制系统主电路框图如图2所示。
3.1 角度信息采集、信息处理系统构成

图2 主电路框图Fig.2 Structure diagram of main circuit
角度信息采集、信息处理系统电路原理图如3所示。由角度信号采集电路、A/D采样电路组成。采用MMA7260Q加速传感器及外接屏蔽线检测遮风板转动角度,再由A/D转换器TLC-2543CN完成信号转换,屏蔽线避开电机中线圈的干扰,能隙式精密电压源MC1403提供2.5 V的基准电压,提高系统的分辨率。
3.2 电机驱动电路
电机驱动电路电路原理图如图4所示。用驱动芯片L298N作为驱动电机的主控芯片,采用7805稳压管提供+5 V电压,光耦隔离输入、输出信号,屏蔽线避开电机中线圈的干扰,提高角度测量的精确度。
3.3 控制及显示电路
控制及显示电路原理如图5所示。
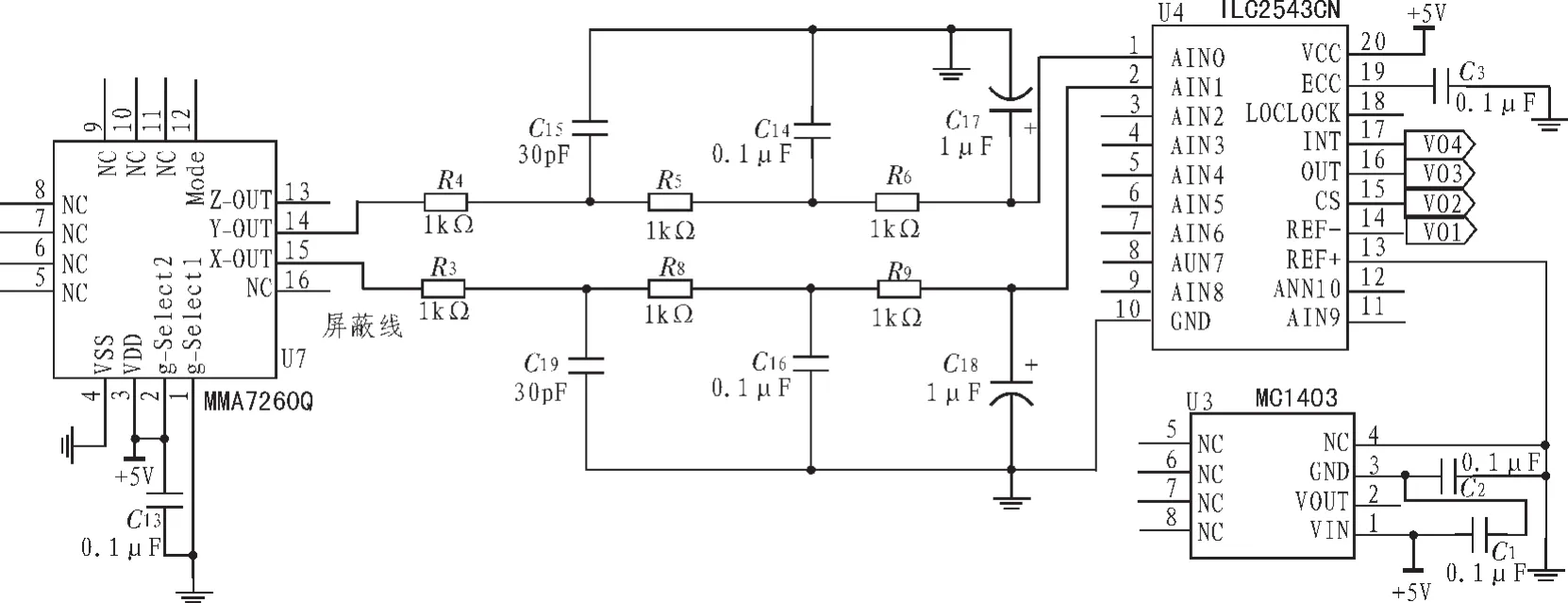
图3 角度信息采集及处理系统电路图Fig.3 Circuit diagram of angle information collecting and information processing system

图4 电机驱动电路原理图Fig.4 Schematic diagram of motor drive circuit

图5 控制及显示系统电路图Fig.5 Circuit diagram of control and display system
3.4电 源
电源系统电路原理图如图6所示。电源由变压部分、滤波部分、稳压部分组成。为整个系统提供+5 V、+12 V、+3.3 V的电压,确保电路稳定工作。
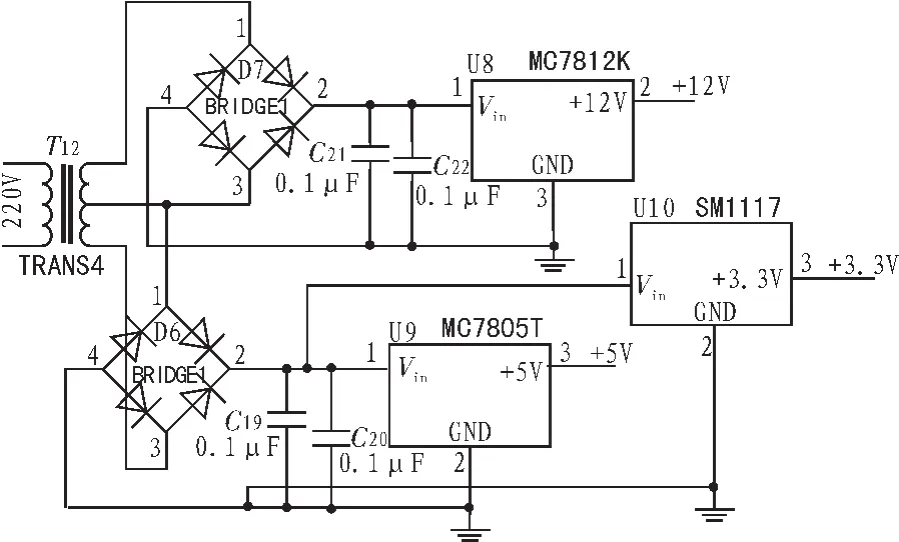
图6 电源系统电路Fig.6 Circuit diagram of power supply system
4 测试及结果分析
4.1 手动遮风板角度数据
手动遮风板角度数据如表1所示。
4.2 设定遮风板转角角度数据
设定遮风板转角角度数据如表2所示。
结果分析:
手动遮风板角度测量准确度达100%,预设遮风板角度测量时绝对误差均小于5°,且完成时间均在10 s范围内。
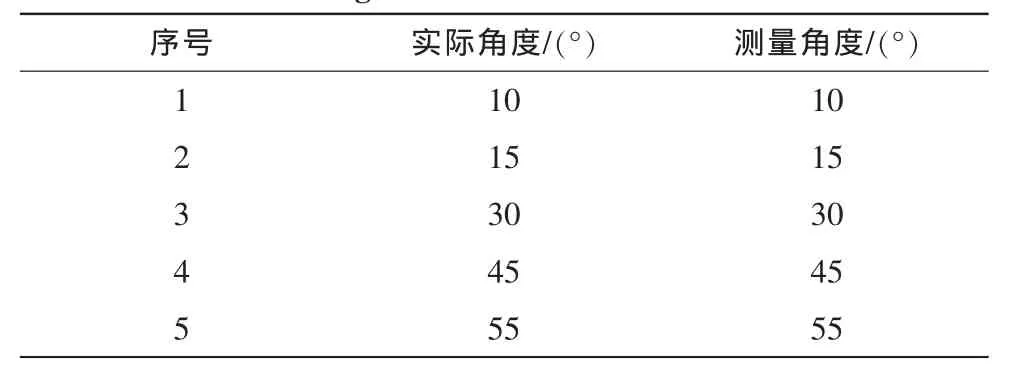
表1 手动遮风板角度数据Tab.1 Angle data of manual wind board cover

表2 遮风板转角角度数据Tab.2 Rotating angle data of wind board cover
5 改进优化
由于系统采用高精度角度传感器进行角度信息采集,进行角度测量时遮风板摆动幅度偏大,不够稳定,在满足电路性能指标的前提下,尽量选择精度稍低的器件,并对电路设计进一步优化。
6 结束语
该方案通过预设参数与采集的反馈参数对比,能够进行自动修正,是一套精度较高的遮风板角度控制系统。
[1]王晓飞,封吉平,何强.基于有限状态机的角度信息采集电路设计[J].计算机测量与控制,2011,19(6):1472-1474.
WANG Xiao-fei,FENG Ji-ping,He Qiang.Design of angle information collection circuit based on FSM[J].Computer Measurement&Control,2011,19(6):1472-1474.
[2]张培仁.基于C语言C8051F系列微控制器原理与应用[M].北京:清华大学出版社,2007.
[3]潘琢金,施国君.C8051FXXX高速SOC单片机原理及应用[M].北京:北京航空航天大学出版社,2002.
[4]刁红泉,胡伟雄,颜钢锋.基于单片机的改进型五相混合式步进电机驱动器设计[J].工程设计学报2004,11(1):19-22.
DIAO Hong-quan,HU Wei-xiong,YAN Gang-feng.Design of five-phase hybrid stepping motor reformative driver based on MCU[J].Journal of Engineering Design,2004,11(1):19-22.
[5]陈京培,徐永梅.基于AT89S52单片机的液晶显示控制电路设[J].现代电子技术,2008(22):22-25.
CHEN Jing-pei,XU Yong-mei.Design of LCD control circuit based on AT89S52 [J]. Modern Electronics Technique,2008(22):22-25.
[6]邹其洪.电工电子实验与计算机仿真[M].北京:电子工业出版社,2008.
[7]何希才.常用电子电路应用365例[M].北京:电子工业出版社,2006.
猜你喜欢
作文小学高年级(2022年3期)2022-04-20 08:17:04
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
科学咨询(2020年53期)2020-03-19 07:41:46
商品与质量(2019年22期)2019-11-29 02:41:40
科学导报·学术(2019年44期)2019-09-10 22:25:45
福建中学数学(2018年1期)2018-11-29 02:52:14
37°女人(2017年8期)2017-08-12 11:20:48
解放军健康(2017年5期)2017-08-01 06:27:42
滇池(2017年7期)2017-07-18 19:32:42
知识经济·中国直销(2016年2期)2016-11-07 09:33:42