
模拟AGV的音控小车的设计与制作
2012-09-25 08:07李雯雯胡金花
合肥师范学院学报 2012年6期
李雯雯, 孔 勐, 胡金花
(合肥师范学院 电子信息工程学院,安徽 合肥230601)
本设计利用凌阳单片机的语音功能,模拟自动导航小车[1]设计并制作了一个音控小车。凌阳单片机、前轮转向电机、后轮驱动电机以及车体共同构成一个带有语音识别的系统[2],可以根据麦克风采集的语音信号和事先训练好的语音库的特征语音进行对比,选择执行相应的动作,外加两个反射式红外传感器[3]实时监控小车的行进范围,防止小车在行使过程中碰撞,实现实时避障功能[4]。
1 系统设计方案
声控小车部分主要分为车身紧急校正模块、语音输入模块、语音输出模块、小车动作执行模块、中心控制模块[5]。系统中声控小车部分的原理框图[6]如图1所示:
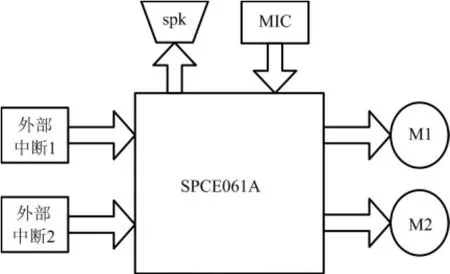
图1 声控小车原理框图
图1中两个外部中断连接的是两个反射式红外传感器,主要用于感测车库内标出的白色边界线,从而控制小车在一个合理的区域内动作。MIC是声控小车的语音输入模块,主要用于接收智能车库的语音命令。SPK是声控小车的语音输出模块,主要用于发出对语音命令的应答。M1是小车的前轮转向执行电机,由一个普通直流电机以及一些连动齿轮组成。M2是小车的后轮驱动电机,由一个减速电机以及一些齿轮组构成。
本系统主控芯片采用SPCE061A[7]。以μ’nSPTM[8]为核心的SPCE061A微控制器是适用于数字语音识别应用领域中的一种最经济的选择;交流减速电机是采用交流单相电容运转的电机,它适合于在低速传动装置中作驱动组件,能起到简化机械结构和降低能耗的作用,它具有运行稳定、转矩大、容易控制等特点;普通直流电机用做转向电机,调速范围大,工作范围大,并且转速高,响应速度快,适合用于音控小车的转向;电机驱动(L298N)是SGS公司的产品。其额定工作电流为1A,最大可达1.5A;Vss电压最小4.5V,最大可达36V;Vs电压最大36V;红外反射式光电传感器[9],其红外反射光强法的测量原理是将发射信号经调制后送红外管发射,光敏管接收调制的红外信号。
2 硬件电路设计
声控小车的车身是用玩具车改装而成,中央控制单元采用凌阳61板,电源部分是由三块手机电池组成,前轮电机采用普通直流电机,后轮驱动电机采用减速电机,电机驱动芯片采用L298。
2.1 电机驱动电路设计方案:
L298N作为驱动芯片,一方面要接受来自单片机的控制信号,通过L298N的使能控制端ENA、ENB控制芯片的工作状态。另一方面要给步进电机以输入信号(OUT1口~OUT4口),使电机转动。L298与步进电机的连接电路如图2所示:

图2 L298连接图
2.2 传感器电路设计方案:
反射式光电传感器,它包括一个可以发射红外光的固态发光二极管和一个用作接收器的固态光敏二极管(或光敏三极管)。在车前方安装了左右两个反射式红外传感器。它们分别接单片机的EXT1和EXT2外部中断,从而保证了实时性,达到了系统的设计要求。反射式红外传感器接线图如图3所示:

图3 反射式红外传感器接线图
3 软件设计
3.1 行使状态控制电路的设计:
整个小车的行驶状态由两个电机来控制,MOTOR 1控制左拐和右拐,MOTOR 2控制前进、倒退。具体行使状态控制如表1所示。

表1 行使状态控制表
3.2 语音辨识设计:
凌阳的SPCE061A是16位单片机,具有DSP功能,有很强的信息处理能力,具备运算速度高的优势,为语音的播放、录放、合成及辨识提供了条件。
特定语者(Speaker Dependent,SD)模式即辨认特定的使用者,使用者可针对特定语者辨认词汇,即在启动小车前,系统将会提示输入语音命令作简单快速的训练纪录,在这里输入“启动”“停止”“返回”和“模式切换”四个语音命令,通过使用者的声音特性加以辨认。进入语音适应(speaker adaptation,SA)阶段,使用者只要经过一段时间的训练后,即可拥有不错的辨识率。语音识别电路基本结构图和语音识别原理图如图4和图5所示:

图4 语音识别电路结构

图5 语音识别原理图
3.3 辨识主程序如图6所示:

图6 辨识主程序流程
3.4 中断部分
由于凌阳单片共有9个中断相量即FIQ、IRQ0-IRQ6及UART IRQ。而9个中断向量共安置了14个中断源,这样就出现了一个中断向量中包含多个中断源的情况,当编写中断服务子程序时注意判断和区分同一中断向量下的中断源。
4 小结
模拟AGV的音控小车以凌阳16位单片机为控制核心,能够识别使用者的语音指令,并且按照指令完成前进、倒车、左传、右转以及倒库等动作;外加的两个反射式红外传感器实时监控小车动作,防止小车在行驶过程中碰撞[10],实现了实时避障功能。模拟AGV的声控小车实物如图7所示:

图7 声控小车实物图
整个系统运行稳定,达到了设计要求,并且充分体现了凌阳16位单片机在数字信号处理及语音处理方面的优越性。
[1]Naiqi Wu,MengChu Zhou.AGV routing for conflict resolution in AGV systems[A].Proceedings of IEEE International Conference on Robotics and Automation[C].2003:1428-1433.
[2]侯媛彬等.凌阳单片机原理及其毕业设计精选[M].科技出版社,2006:30-47.
[3]吴建平,殷战国,曹思榕,李坤垣.红外反射式传感器在自主式寻迹小车导航中的应用[J].中国测试技术,2004年11月第30卷第6期:21-23.
[4]Chuck Thorpe,Justin Carlson,Dave Duggins,etc.Safe Robot Driving in Cluttered Environments[J].Proceedings of the 11th International Symposium of Robotics Research.2003,10(1):870-875.
[5]Y.J.Kim,J.H.Kim,D.S.Kwon.Evolutionary Programming-Based Uni-Vector Field Navigation Method for Fast Mobile Robots[J].IEEE Transactions on Systems Man and Cybernetics,2001,31(3):450-458.
[6]池瑞楠,胡终须,胡跃明.非完整两轮驱动移动机器人的实验研究[J].机器人技术与应用,2001.36-40.
[7]罗亚非等.凌阳十六位单片机应用基础[M].北京航空航天大学出版社,2007:55-59.
[8]薛均义等.凌阳十六位单片机原理与应用[M].北京航空航天大学出版社,2003:17-19.
[9]何希才.传感器及其应用电路[M].北京:电子工业出版社,2001.146-161.
[10]M.Yang,H.Wang,K.He.Obstacle Avoidance Using Range Data in Autonomous Navigation of Mobile Robot[J].WenTd.Proc of the 1999International Symposiumon Test and Measurement.Xi'an:Int Academic Publishers,1999,929-933.
猜你喜欢
锦绣·下旬刊(2021年11期)2021-10-12
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
中国电气工程学报(2020年2期)2020-07-28
科技视界(2019年20期)2019-08-29
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
物理实验(2017年2期)2017-03-21
小学阅读指南·高年级版(2016年7期)2016-07-25
小学阅读指南·低年级版(2016年7期)2016-05-14
