56F8346的电动机软启动器设计
2012-09-25 02:59李鑫李国洪
单片机与嵌入式系统应用 2012年2期
李鑫,李国洪
(天津理工大学 天津市复杂系统控制理论及应用重点实验室,天津 300384)
引 言
电动机直接启动时产生的电流很大,一般为额定电流的4~7倍,最高可达15倍,严重影响了电动机的启动性能。晶闸管门极脉冲相位的变化可以改变输出端电压的幅值,以此改变负载端的电压。基于此原理,研究了一种基于Freescale公司的DSP芯片56F8346的软启动器,它可以降低启动电流,并且启动时间比传统的单纯降压启动要短,可以替代传统降压启动方式,解决了电动机控制中存在的一些难题。
1 软启动器总体方案
通过研究软启动的基本原理和对电动机启动电流的分析,设计出软启动控制策略。硬件设计主要包括主电路和控制电路。采用DSP控制完成系统信号检测、数据运算、指令传输、触发信号产生等任务,实现电动机的软启动。软件设计采用模块化方法,并且选用C语言进行编程,这样既便于软件调试和运行,又兼顾了源程序面向过程、节省存储空间的优越性。该软启动器可达到以下的技术指标:
◆启动过程时间为0~60s(可调)。
◆兼有对被制动的电动机正常启停(非制动停止)的功能。
◆兼有对被制动的电动机短路保护、过载保护、过压、欠压保护功能。
◆环境温度为-40~150℃时均能正常工作。
2 软启动器硬件设计
软启动器硬件包括主电路和控制电路两部分。主电路通过控制反并联的晶闸管的导通角来改变加载在电动机两端的电压,从而实现软启动。控制电路包括DSP控制电路、触发驱动电路、检测电路、同步电路、键盘显示电路等。需要检测的物理量有电压、电流、相位、温度等,这些信息需送入DSP进行处理,以形成对晶闸管的控制信号。系统电路原理图如图1所示。
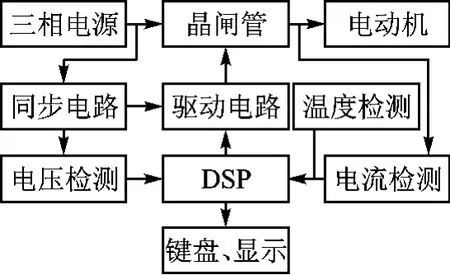
图1 系统电路原理图
2.1 同步触发驱动电路
为了使各个晶闸管的触发脉冲与其阳极电源保持严格的同步相位关系,在系统中必须设置同步电路。本系统中,同步信号采用3个同步变压器,同步变压器输出的信号经过光电隔离及功率驱动后送入DSP,由DSP检测同步信号状态,以保证晶闸管触发脉冲相位与主电路电压相位精确可调。同时,由三相电源经同步变压器后输出的电压信号通过电阻、电容组成的限流移相电路移相30°后,再经过光耦TLP250驱动后送到晶闸管集成触发芯片TC787。
TC787主要包括3路相同的部分:同步过零检测和极性检测、锯齿波形成及比较电路,以及抗干扰锁定、脉冲发生器、脉冲形成、脉冲分配和驱动电路。触发电路接受DSP的控制,DSP根据控制的需要由PWM输出转换得到一个直流电压。该电压被加到TC787的第4脚,4脚的电压与芯片内部的锯齿波比较,取得交相点,控制输出脉冲。输出脉冲通过脉冲放大整形后送出,作为晶闸管的触发信号。晶闸管的输入是采用光耦驱动。图2为一路同步触发驱动电路,光耦芯片采用TLP250。
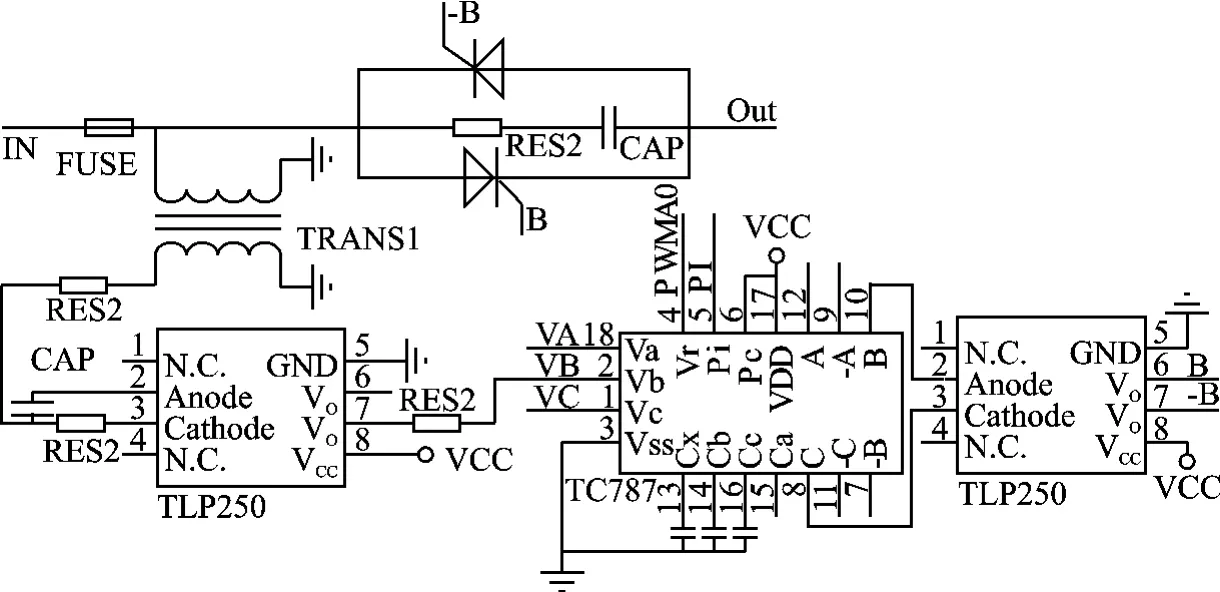
图2 一路同步触发驱动电路
2.2 电压电流检测电路
同步变压器输出的三相电压分别经过全桥整流、滤波和分压后获得一个直流电压信号,将此信号作为反馈输入到DSP的A/D引脚,A/D转换器对此信号进行采样,然后取平均值作为此时电压的反馈值,再根据值的大小进行判断和处理。电流互感器的输出经过全桥整流、滤波和分压后获得一个直流电流信号,将此信号作为反馈输入DSP的A/D口,A/D转换器对此信号进行采样,然后取平均值作为此时电流的反馈值,再根据值的大小进行判断和处理。电流检测电路如图3所示。电压检测电路与此类似,不再赘述。
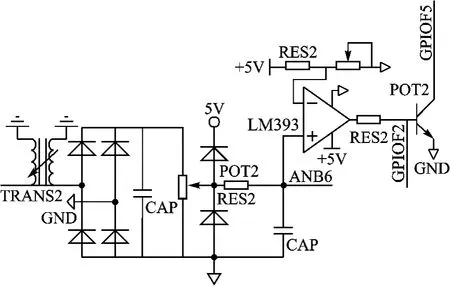
图3 电流检测电路
2.3 硬件抗干扰措施
绘制印刷电路板时,应注意采用正确的方法,以提高控制系统的可靠性。在测量电路中,通过RC低通滤波器消除由主电路感应过来的尖峰电压;在控制电路的数字部分,每一个集成电路都要配置一个高频去耦电容,以消除数字线路上尖峰电流所造成的影响。
3 软启动器软件设计
软启动器各部分电路的协调工作需要软件的配合,因此软件设计的好坏直接影响到系统能否正常运行、能否满足系统的设计功能要求。该系统软件要实现的功能包括控制移相触发角,以及数据的动态显示、采集及处理等。系统的软件流程包括:主程序、中断处理和按键显示三部分。
3.1 主程序
主程序主要负责系统管理,包括系统自检和初始化、相应启动程序和中断处理部分。主程序流程图如图4所示。系统的初始化包括I/O口初始化、A/D采样模块初始化、PWM模块初始化、SCI通信模块初始化、中断系统状态初始化以及DSP外设初始化等。软启动系统工作之前要进行系统的自检,及时发现电路中存在的问题,保证软启动系统和电动机工作的安全。自检的内容包括电压、电流、温度、相位。系统启动部分设计内容包括判断是否要求启动,启动是否完毕,以及系统是否稳定运行等。主程序完成初始化和自检后如得到启动命令则进入一个循环,等待中断发生,直到启动完成。
3.2 中断处理
系统中断响应共4个中断源,按优先级从高到低包括:故障处理中断、A/D采样中断、电压环和电流环PI计算中断、PWM重载中断。电压和电流反馈量是晶闸管软启动系统的重要反馈信息。在系统中,采用以电流作为反馈量的恒流启动方式。A/D采样中断测得电流电压反馈量,如果该值是故障值(过流、过压、欠压、缺相等),则进入故障处理中断;否则进入电压环和电流环PI计算中断,经PI调节计算得到触发角,触发PWM重载中断,输出触发信号,进行调整。
在56F8346中有两个模/数转换模块(ADC),包括16路模/数转换输入口,使用4个采样保持器。本系统使用两路采样保持器,对电流、电压信号进行同时采样。ADC采样时刻与PWM中心时刻调整成精确同步,这样每次PWM正脉宽的中心时刻同步启动ADC。
3.3 按键显示
本系统采用非编码键盘,以扫描方式查寻键值。显示部分采用5个共阴极的LED显示器,前2位显示参数或者故障类别,后3位显示相应参数的数值。键盘部分实现人机对话、参数设定与修改,显示部分用来实现工作参数及故障类别显示。
3.4 软件抗干扰措施
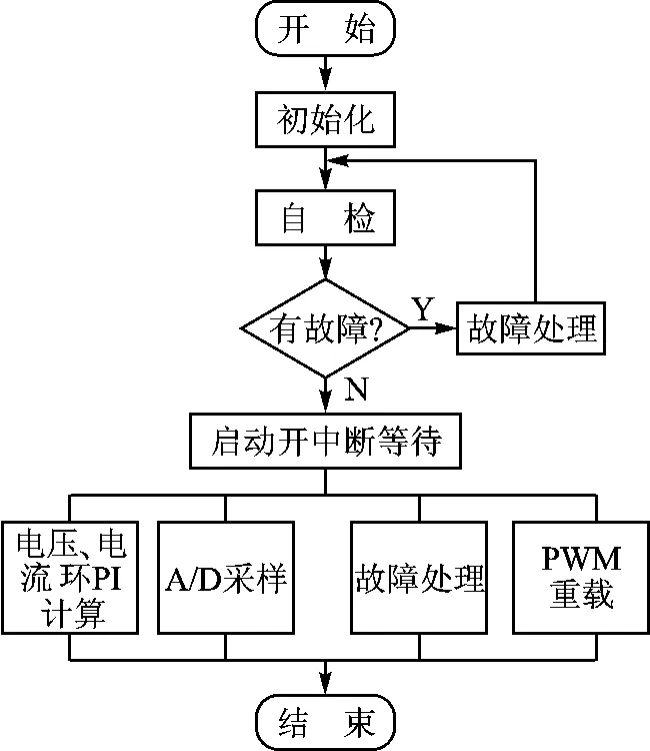
图4 主程序流程图
由于各种干扰源的存在,在系统硬件采取措施的基础上,进行软件抗干扰设计。在模拟输入信号端采用硬件滤波后,再使用软件滤波技术,保证数据信息的可靠和可信;对于状态信号的抗干扰输入,多次重复采样,直到连续两次或多次采集结果完全一致时为有效;在软件设计中使用了软件冗余、软件陷阱和看门狗技术,有效地防止程序失效和陷入死循环,保证系统和程序正常运行。
4 总 结
本文所设计的软启动器能实现以下功能:
①能克服直接启动和传统降压启动的缺点,实现平滑、无级加速的启动,完善的保护功能可以实现电动机的缺相、过压、欠压、过流、过载、短路保护等;
②根据所需的启动技术参数和要求进行启动,对电网及设备的冲击相对较弱;
③正常工作时显示工作电压、工作电流、最大电流等参数。故障时显示故障原因及参数,并进行故障报警。
[1]胡红明,毛承雄,陆继明,等.分级交-交变频高转矩软启动器原理和仿真[J].电气传动,2009,39(2):16-19.
[2]姜彦,于洪英.基于DSP平台的软启动控制器设计[J].广东化工,2009,36(8):254-256.
[3]程光.电机软启动智能控制系统的研究[J].机电产品开发与创新,2005(5):116-117.
猜你喜欢
现代信息科技(2022年20期)2022-11-17
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
通信技术(2018年11期)2018-11-07
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
东北电力大学学报(2015年1期)2015-11-13
电子设计工程(2015年12期)2015-02-27