
基于视频图像的道路车流检测系统
2012-09-25 01:49:16韩海玲焦红岩
电气传动自动化 2012年6期
韩海玲,焦红岩
(兰州交通大学教育部重点实验室,甘肃兰州 730070)
1 引言
随着现代经济的高速发展,交通运输的保障就显得尤其重要,对交通管理的要求也越来越高,将计算机科学与通信等高新技术运用于交通监控管理与车辆控制,以保障交通顺畅及行车安全,从而改善环境质量、促进经济发展的智能交通系统ITS(Intelligent traffic system,ITS)也随之产生。在智能交通管理系统中,实时获取交通车流量的车辆检测技术是ITS的基础。利用图像处理技术来实现交通流量的车辆检测技术已成为该研究领域的热点。研究基于图像处理技术的交通流量车辆检测技术始于上个世纪80年代,到现在,检测思想和算法一直在不断的改进和革新。有的研究基于检测区域,有的研究基于整幅图片,大量的文献都是基于整幅图片的研究,如背景差分方法、帧差分方法等。
然而,现今的方法中存在有以下问题:必须靠车道来分割不同车辆;使用某一时刻无运动物体的图像作为背景来提取车辆;忽视车辆阴影的影响;采样频率与车速不匹配导致车辆误计等。对此本研究作了一系列的改进,提出一种新的实用算法,高斯背景建模。主要实现以下几个目的:①实时获取背景图像;②提取每一帧图像上的车辆;③背景图像的更新;④区分每一帧上的不同车辆;⑤对检测到的目标进行跟踪。
2 实验方法
背景建模方法很适合在摄像机静止情景下的背景估计。可以假设背景的缓慢变化符合一个随机概率分布,利用该随机概率分布进行背景建模可以得到比较好的背景估计。为解决光线缓慢变化、背景存在扰动干扰等情况,本文主要讨论一种自适应高斯背景建模方法,使背景图像的更新机制具有自适应性,检测具有鲁棒性。运动目标检测流程如图1所示。
2.1 高斯背景建模原理
利用高斯分布背景建模就是假设图像序列在时间域中某点的像素值f(x,y)的变化符合高斯分布,对场景中每个像素点建立高斯模型,对新来的帧进行高斯模型的拟合来提取背景图像。利用高斯背景建模分为两个方面:①利用初始帧进行背景初始化;②在检测的过程中利用新到来的帧对背景进行适当更新,这样可以使检测具有自适应性。本文所讨论的背景是由于光照变化,微风等原因引起的缓慢周期性变化时,用单一自适应背景模型便可解决。单高斯分布的背景模型适用于运动物体数量少、背景在大部分时间是可见的情况。如果背景中存在植物摇摆、水波晃动等周期性干扰运动且运动目标数量多等复杂环境,则可以考虑混合高斯背景建模或混合高斯背景建模与其他方法的结合,这样检测准确性将会得到很大提高。下面主要介绍的是单高斯背景建模理论。
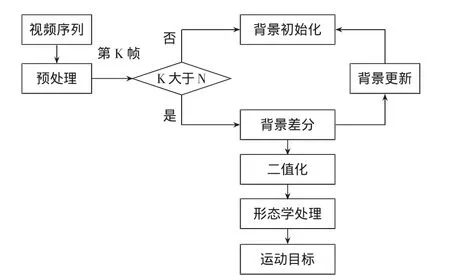
图1 运动目标检测流程图
高斯分布概率密度函数为:
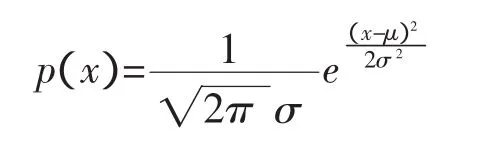
其中:μ为均值,σ为标准方差。单高斯背景模为每个图像点的颜色建立了单个高斯分布,用η(μ,σ 2)表示。设k帧时图像点(x,y)的当前像素值为fk(x,y)。
2.2 背景图像初始化
在建模初期应该利用视频图像初始帧快速建立一个背景估计,如果只利用第一帧进行背景初始化,这样会形成比较大的误差,对后期的运动目标检测会产生一定影响。本文讨论使用一种统计平均法来背景初始化。统计平均法即求取一段时间内图像序列中N帧图像的灰度平均值作为背景图像的估计值,以弱化运动目标对背景的干扰。设μ0(x,y),σ02(x,y)为某点初始背景估计的均值与方差,则
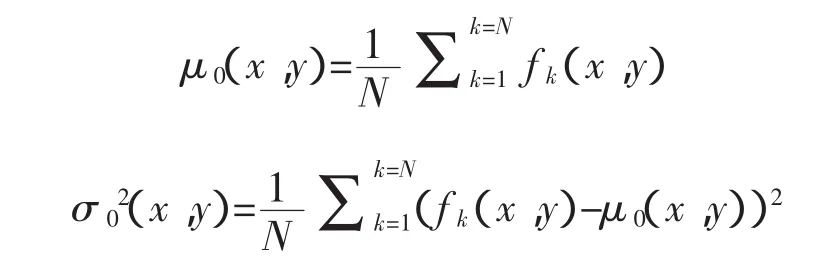
其中:N为所选取的帧数。
2.3 背景图像更新
算法的思想是当前帧与前一帧的背景模型进行差分,如果大于设定的阈值则像素判定为前景运动目标,该点的背景模型就不用更新;如果小于设定的阈值,则像素被判定为背景,利用相应法则对背景像素进行更新。

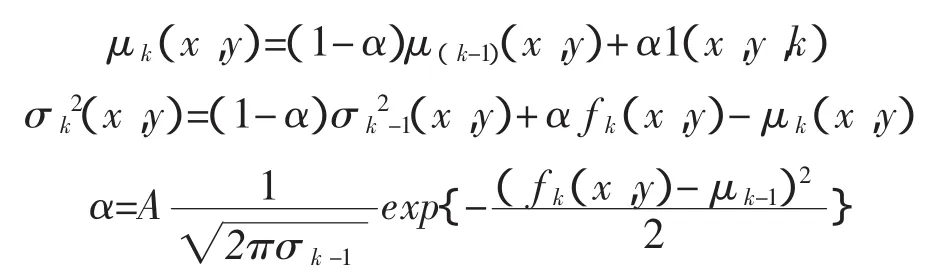
其中:T为前景分割时所选取的阈值。α为背景更新率,其取值范围为0<α<1。α越小,背景更新速度越慢,α越大,背景更新速度越快。更新速度太慢,需要较长时间才可以适应背景;更新速度太快,背景建模容易引入噪声,因此α取值要合理。
2.4 运动车辆分割
运动目标分割是检测当前图像和背景图像中对应像素的灰度值差异,如果差值大于某一阈值,则判定该像素为前景运动目标,值为1;否则,值为0。检测规则为:
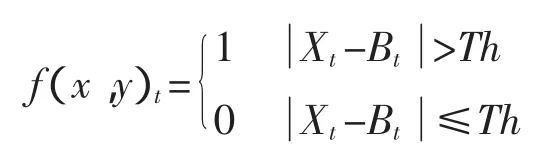
其中:Bt表示像素点(x,y)在时刻t的背景灰度值,Th表示阈值。阈值的选取在二值化过程中非常重要,它的取值直接影响到二值化的效果如何。由于车辆的灰度差别较大,选用固定的阈值将会漏检或误检车辆区域。鉴于此,本文选用Otsu阈值化方法。Otsu阈值化方法是一种自动的非参数无监督的阈值选择法,它基于类间方差最大的测度准则,当该测度函数取最大时得到最佳阈值。
2.5 运动目标跟踪
在计算出各个前景区域的特征参数(上述经过筛选后保存的前景区域的特征参数)后,就可以从多个前景区域中指定要跟踪的目标。文中提出一种根据特征值近似循环的目标指定方法。该方法的设计思想也比较简单,因为已经对飞行目标和与飞行目标大小接近的云和噪声的特征值(面积和重心横纵坐标值)进行了保存,因此当需要选择跟踪目标时,从保存的特征参数中选择一个指定为跟踪目标。选择的结果或者是目标,或者是与飞行目标大小接近的云和噪声。如果不是要跟踪的目标,从保存的特征值中选择下一个即可。
特征值被保存的前景区域可以被指定为要跟踪的目标。这种方法虽然不是直接指定跟踪目标,但减少了系统设计的复杂度,而且选择精度高。由于目标数量有限,瞄准手很快就可以选择上合适的跟踪目标。当在某幅图中指定了要跟踪的目标后就可以在随后的图像中识别跟踪目标了。识别的依据是基于区域面积和区域重心这两个特征,即在相邻两幅图中这两个特征的值变化都不会太大。
3 试验结果及分析
Simulink是Matlab最重要的组件之一,可以提供一个动态系统建模、仿真和综合分析的集成环境。在该环境中,用户不需要一行行的编写程序代码,只需要通过简单直观的鼠标操作,就可以构造出复杂的系统。Simulink具有适应面广、结构和流程清晰及仿真精细、贴近实际、效率高、灵活等优点,并有大量的第三方软件和硬件可应用于或被要求应用于Simulink。仿真模块框图如图2所示。
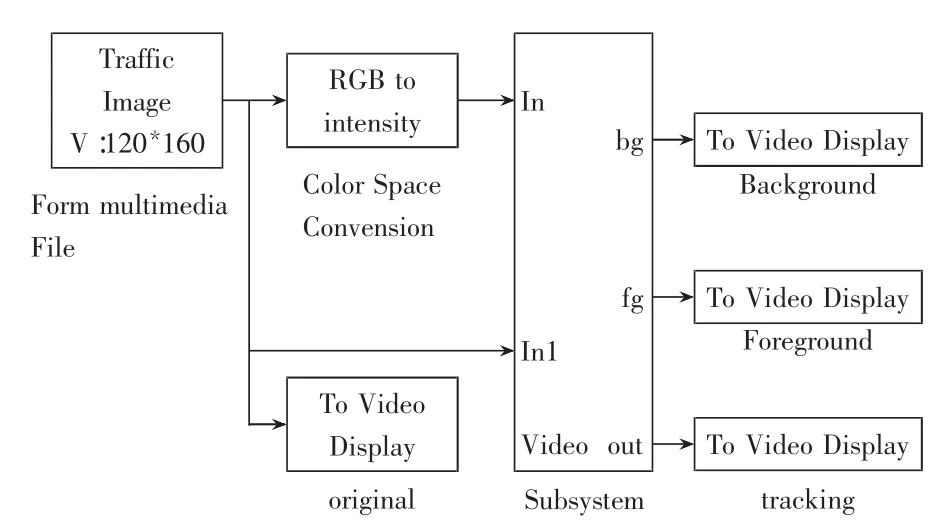
图2 Simulink仿真模块框图
以Simulink为基础的视频和图像处理模块工具箱提供了视频和图像处理中用到的各种子系统模型,它包含11个大类库,含有数十种模块类型。用户无需编程,可直接在Simulink环境下调用仿真,分析和设计图像处理系统。
通过该模型,可以得到如图3-图6所示的处理结果。

图3 原始图像
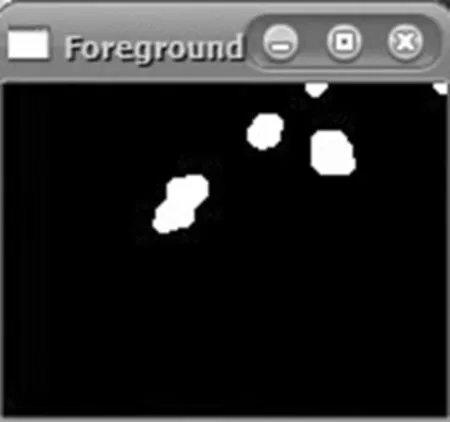
图4 车辆分割

图5 车辆标记

图6 车辆跟踪
4 结束语
本文提出了一种基于背景模型法的背景更新方法,以简化混合高斯模型为基础,提高了处理速度,改进与完善了高斯背景更新方法。以背景差分法为基础,结合形态学滤波和八连通域算法准确对多个运动目标进行检测。实验证明,基于背景差分的多运动目标跟踪检测算法不仅简单快速,而且能够较好地检测多个动态目标,证明了算法的可行性,使用价值明显。
基于视频图像处理的车辆检测法缺点在于大型车辆能遮挡随行的小型车辆,由于摄像安装的角度与高度的限制导致的不同车道的车辆遮挡问题,阴影、积水反射或昼夜转换可造成检测误差。
[1]Rafael C.Gonzalez,Richard E.Words,阮秋琦,阮宇智等译.数字图像处理[M].北京:电子工业出版社,2003.
[2]章毓晋.图像分割[M].北京:科学出版社,2001.
[3]张兆礼,赵春晖等.现代图像处理技术及Matlab实现[M].北京:人民邮电出版社2001.
[4]容观澳.计算机图像处理[M].北京:清华大学出版社,2000.
[5]贾云得.机器视觉[M].北京:科学出版社,2003.
[6]吴逸飞编译.模式识别的原理、方法及应用[M].北京:清华大学出版社,2002.
[7]陆其明.DirectShow开发指南[M].北京:清华大学出版社,2003.
[8]朱 江,宜国荣,郑振东.基于视频动态投影的实时车辆流量检测系统[J].计算机工程,2001,27(11):25-27.
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
汽车工程师(2021年12期)2022-01-17 02:29:54
当代陕西(2020年14期)2021-01-08 09:30:42
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
电子制作(2018年18期)2018-11-14 01:48:20
中国公共安全(2017年8期)2017-10-13 08:12:21
中国公共安全(2017年8期)2017-10-13 08:12:20
贵州师范学院学报(2016年4期)2016-12-01 03:54:07
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:36
河南科技(2014年1期)2014-02-27 14:04:06
