
基于矩阵束算法的极点提取分析*
2012-09-25 02:13邹传云
通信技术 2012年6期
徐 利, 邹传云, 陈 民, 何 毅
0 引言
从目标瞬态响应中提取其自然谐振复频率即极点是现代目标识别的一种重要方法。极点提供了源无关特性,仅与散射体目标结构有关,因此目标极点准确提取是目标识别的关键所在。在众多的极点提取方法如矩阵束算法(MPM,Matrix Pencil Method )[1-2]、Prony法、E脉冲法(E-pulse)中,由于矩阵束算法对噪声具有较强的抑制能力和高精度的数据拟合能力而得到广泛应用[3-6]。
极点提取的准确性受到目标极点模数、奇异值分解(SVD,Singular Value Decomposition)参数及噪声的影响较大。为了提高极点提取精确度,结合实例,提出了目标极点模数及SVD参数的取值方法,并分析了不同信噪比情况下,噪声信号极点提取的误差。
1 矩阵束算法
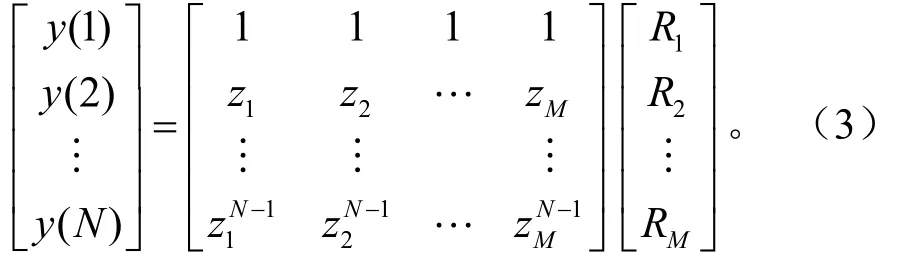
根据极点展开法(SEM,Singularity Expansion Method)理论,目标电磁散射后时响应的数学模型可以表示成一系列衰减复指数和的形式:
式中,x(t)为信号, n(t)为噪声;Ri是复振幅(留数);极点 zi=αi+jωi(αi、ωi分别代表衰减因子和角频率);M为极点个数。
为获得最佳的 M , R和iz,首先由噪声数据()ykt△(t△是采样间隔,k为采样点数)构造Hankel矩阵Y:
式中,N为数据采样点数,L是函数束参数。
其次,对 Y进行奇异值分解[7]以获得特征矢量及特征值:

式中,矩阵U、V分别为Y的左奇异矩阵和右奇异矩阵,由矩阵 YHYHH、YHHYH的特征矢量组成,上标H表示共轭转置。对角矩阵∑由Y的特征值组成。
由于σc按照从大到小顺序排列,比较每个σc和最大奇异值的比值直至满足 σcσmax≈1 0-P(P代表计算精度,默认值为采样数据的小数位数), 即可确定M的取值。
然后,构造滤波矩阵 V ′= [ v1, v2,… ,vM], 分别去掉 V ′的第一行和最后一行得到V2',V1',取∑的前M列 ∑ ′,则:
求得iM 和iZ后 ,系数iR可利用最小二乘法计算得到,具体式为:
2 极点提取的参数选取
目标散射信号的极点不仅与噪声有关,还受到M、P的影响。在一定噪声范围内,M、P的不同组合,使得提取的极点和真实极点之间存在较大偏差,而且还可能出现虚假、寄生极点。选择正确的极点数M,才能利用奇异值分解改善极点提取效果[8]。
2.1 目标极点M可预知时,P的确定
首先,取P的默认值为起始值,以一定的步长减小 P,反复运行矩阵束算法,直到提取极点的个数与M相同为止,此时的P即为所求值。
为验证方法的有效性,用3对留数、极点对{(11,1 ± 2 π × 2 j ),( 7 ejπ/2,2 ± 2 π × 3 j ),( 2 0ejπ,5±2π ×12j)}构造衰减指数和正弦信号,对应的时域信号如图1所示。
对此衰减正弦信号加入20 dB的高斯白噪声模拟噪声信号。图2 给出了具有3对极点的正弦衰减噪声信号在P的不同取值时,极点分布情况。
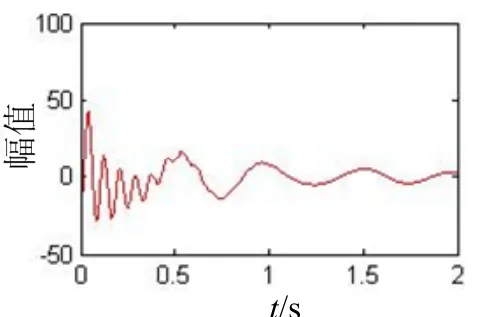
图1 由极点、留数构造的正弦衰减信号
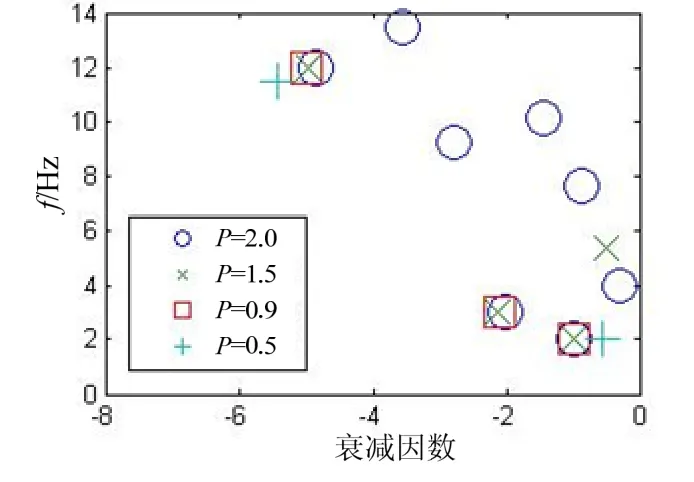
图2 不同P值时,信号极点分布
由此可以看出,当P取0.9时提取的极点、留数值与所给参数值相同,证明了该方法的有效性。
2.2 目标极点未知时,M、P的确定
假设目标的极点个数为M。设置P由默认值开始,并以一定的步长递减,利用矩阵束算法获得目标不同M值时的极点、留数对(iZ,iR);然后,利用极点、留数重构目标时域信号。定义归一化均方误差:

表征重构信号与原信号的误差。在M的范围内,通过遍历求解MSE,其最小值对应的M即为目标极点个数。再选取与M对应的P值,即可获得准确的极点、留数值。
以图1所示的信号为目标信号,应用上述方法,获得目标极点数M与MSE的关系,如图3所示。
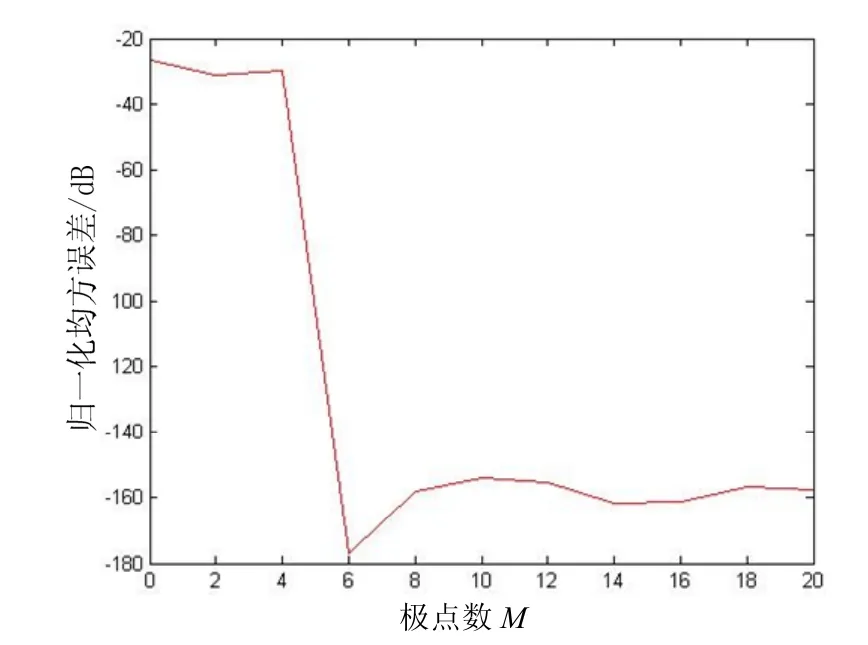
图3 M与MSE的关系曲线
由图3可以看出, MSE是M的函数,并且随着M的增大而逐渐减小;当M为6时,MSE急剧衰减取得最小值;而后呈增大趋势。由此表明,目标极点数目M可以确定为6。通过选取适当的P(此处为0.9),可获得精确的极点、留数值。
3 矩阵束算法抑制噪声能力分析
矩阵束算法本身对噪声具有一定的滤波作用,但是当信噪比超过一定的范围时,目标极点提取准确性会产生较大的误差。有些文献给出了在确定的 P值下,实现极点精确提取的信噪比门限值为30 dB。但是对于不同的应用场合,如无芯标签、基于极点特征的雷达目标识别,该门限值可以适当降低。
以图1所示的信号为参考信号,分别对其加入SNR为40 dB,30 dB,20 dB,10 dB的高斯白噪声,分析了不同 P 值情况下目标极点的分布及误差分析,如图4、表1所示。
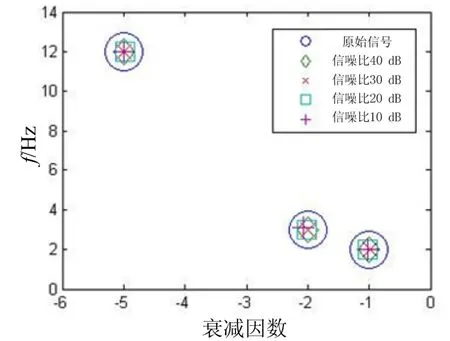
图4 不同信噪比时,目标极点分布
图4 表明,矩阵束算法在SNR为10 dB时,提取极点与原极点基本重合。表1给出了在该信噪比情况下,极点提取的数值分析。
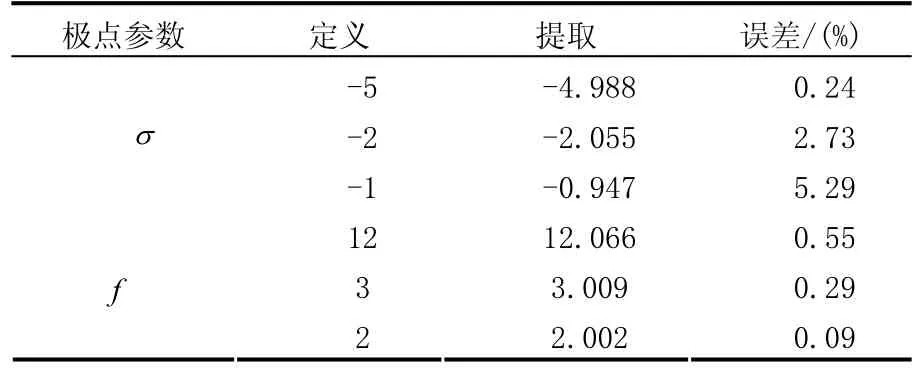
表1 SNR为10 dB时,提取极点的参数
由表1可以得出,在SNR为10 dB时,极点衰减因子σ和频率f的最大误差分别为5.29%、0.55%,表明矩阵束算法实现极点精确提取的噪声门限值在10 dB时仍具有较高的可靠性。
4 结语
文中在矩阵束算法的基础上分析了目标极点数目M以及SVD参数P对极点提取精度的影响,并提出了一种确定了M、P的取值方法。仿真结果表明该方法对实现极点准确提取的可行性,对基于目标极点提取的研究有重要的参考价值。
由于实际数据中不可避免的会伴有噪声干扰,通过对不同信噪比的噪声信号进行极点提取,分析了矩阵束算法抑制噪声的能力,为矩阵束算法的应用指定了范围。然而,10 dB的噪声处理能力在某些方面可能会限制矩阵束算法的应用,以后的工作将着重研究对矩阵束算法的优化,以提高其对低信噪比信号的去噪能力。
[1] HUA Y, SARKAR T K. Matrix Pencil Method for Estimating Parameters of Exponentially Damped/undamped Sinusoids in Noise[J]. IEEE Trans.Acoustic Speech and Signal Processing, 1990,38(05):814-824.
[2] SARKAR T K, PARK S, KOH J W, et a1. Application of the Matrix Pencil Method for Estimating the SEM(Singularity Expansion Method)Poles of Source—Free Transient Responses from Multiple Look Directions[J]. IEEE Trans on Antennas and Propagation,2000,48(04):612-618.
[3] WANG S, GAUN X, WANG D et al. Application of Matrix Pencil Method for Estimating Natural Resonances of Scatters[J]. Electronics Letters, 2007, 43(01):3-5.
[4] 蔡会甫,黄登山.一种高分辨稳定的相干信源 DOA估计[J]. 信息安全与通信保密, 2009(08):47-49.
[5] 任淑婷,郭黎利. 基于模糊小波神经网络的短波频率预测[J]. 通信技术, 2011,44(04):37-39.
[6] 李炎欣,赖惠成.一种新的小波域彩色图像水印算法[J].通信技术, 2011,44(04):129-131.
[7] 黄彩云,费耀平,李敏.基于奇异值分解的小波域水印算法[J]. 信息安全与通信保密, 2006(09):133-135.
[8] LEE J H, KIM H T. Selection of Sampling Interval for Least Squares Prony Method[J]. Electron. Lett.,2005, 41(01): 47-492.
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
北京航空航天大学学报(2019年9期)2019-10-26
雷达学报(2017年3期)2018-01-19
中学生数理化·八年级物理人教版(2017年9期)2017-12-20
中央民族大学学报(自然科学版)(2016年3期)2016-06-27
雷达与对抗(2015年3期)2015-12-09
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
噪声与振动控制(2015年4期)2015-01-01
