
永磁同步电机FOC/DTC系统启动方法研究
2012-09-22 06:56李耀华刘晶郁张德鹏关家午蔡红民
电气传动自动化 2012年5期
李耀华,刘晶郁,张德鹏,关家午,蔡红民
(长安大学汽车学院,陕西西安710072)
1 引言
永磁同步电动机具有结构简单、体积小、重量轻、功率因数高等优越性能,由其组成的高性能驱动系统近年来受到了广泛的关注。而针对感应电机提出的矢量控制和直接转矩控制技术在永磁同步电机领域也得到了应用[1]。
和感应电机矢量控制系统类似,永磁同步电机矢量控制系统同样需要连续转子位置信息以实现定子电流励磁分量和转矩分量的解耦,其中转子位置信息采用转子位置传感器得到。对于增量式转子位置传感器,由于其初始输出值为零,与实际值存在误差,故不能用于启动电机。
与感应电机直接转矩控制系统不同,永磁同步电机直接转矩控制系统的定子磁链初始值并不为零,而由转子永磁体磁链以及转子初始位置决定。定子磁链估算方法一般采取电流模型或者电压模型。由于电流模型同样需要连续转子位置信息,因此同样存在启动问题。对于电压模型,定子磁链积分器在静止坐标系的初始值需要转子初始位置信息,因此其也存在着启动问题。
研究者提出了各种方法实现转子初始位置判定,如:扩展卡尔曼滤波器[2]和三次谐波注入[3]等,但这些方法存在实现较为复杂,需要额外的电路等问题。
本文针对一台15kW内置式永磁同步电机矢量控制系统和直接转矩控制系统,提出了两种简单的启动方法(两步定位法和SPWM开环启动法),并得到了实验验证。
2 启动方法
2.1 两步定位法
由于转子传感器初始输出值为零,则如果转子初始实际位置与转子传感器输出相同,转子传感器输出就可应用于启动电机。对于直接转矩控制电压模型,如果使得转子初始位置与电压模型定子磁链积分器的初始设定相同,则可直接启动直接转矩控制系统。本文将转子位置初始定位在静止坐标系的0°位置。但如果转子初始位置恰好在180°,此时定位法失效,本文提出先把转子定位在60°之后再定位在0°,这就是两步定位法的基本思想。
两步定位法控制下,内置式永磁同步电机的a相定子电流如图1所示,其中横坐标1s/格,纵坐标20A/格,其中实验所用内置式永磁同步电机的参数如下:
IPMSM:极对数 p=6,定子电阻 RS=0.0142Ω,d轴电感 Ld=0.6660mH,q 轴电感 Lq=0.8745mH,永磁体磁链 ψf=0.06Wb,最大相电流 Imax=160A。

图1 两步定位法下的电机a相定子电流波形
由于电机在转子定位过程中的旋转方向是由转子初始位置决定的,无法预先控制。因此,两步定位法不能应用于某些领域。
2.2 SPWM 开环启动法
对于电动汽车,要求在启动初始阶段,电机处于零转速或低转速状态,之后再加速至参考转速。因此,可以采用SPWM开环启动法,先采用SPWM控制,让电机运转在低速状态,当转子位置传感器的输出为正确值时,再切换至矢量控制或者直接转矩控制,而且SPWM控制下电机的旋转方向可控。对于采用电压模型估算定子磁链的直接转矩控制,由于不需要转子位置传感器,则切换点可由时间控制,但存在切换点的电压模型定子磁链与实际定子磁链的误差问题。
SPWM控制下,电机转速为5rpm时电机的a相定子电流如图2所示,其中横坐标1s/格,纵坐标20A/格。
3 实验结果
下文给出内置式永磁同步电机矢量控制系统和采用电流模型和电压模型估算定子磁链的直接转矩控制系统分别采用两步定位法和SPWM开环启动法的实验结果。矢量控制系统采用滞环电流法实现,三相定子电流滞环宽度为0.1A。直接转矩控制系统采用开关表控制,定子磁链幅值和转矩滞环控制宽度分别为0Wb和0Nm。

图2 SPWM控制下的电机a相定子电流波形
3.1 两步定位法
3.1.1 矢量控制系统
参考定子d轴电流为0A,参考转速为100rpm。电机从静止状态至稳态100rpm的a相定子电流(50A/格)和转速(100rpm/格)波形如图 3所示,其中横坐标为2s/格。
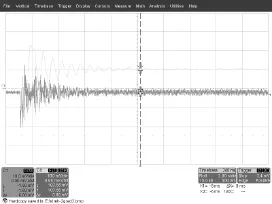
图3 电机a相定子电流和转速波形
3.1.2 电流模型下的直接转矩控制系统
参考定子磁链幅值为0.06Wb,参考转速为100rpm。电机从静止状态至稳态100rpm的a相定子电流(50A/格)和转速(100rpm/格)波形如图 4所示,其中横坐标为2s/格。
3.1.3 电压模型下的直接转矩控制系统
参考定子磁链幅值为0.06Wb,参考转速为150rpm。电机从静止状态至稳态150rpm的a相定子电流(黄色,50A/格)和转速(绿色,100rpm/格)波形如图5所示,其中横坐标为2s/格。
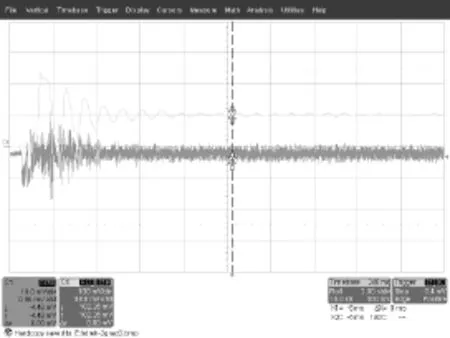
图4 电机a相定子电流和转速波形
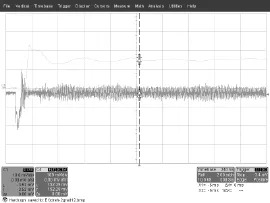
图5 电机a相定子电流和转速波形
3.2 SPWM 开环启动法
3.2.1 矢量控制系统
参考定子d轴电流为0A,参考转速为100rpm。先使用SPWM使电机从静止状态运行至5rpm,当转子传感器输出正确时,再切换至矢量控制。电机从5rpm至稳态100rpm的a相定子电流(50A/格)和转速(100rpm/格)波形如图6所示,其中横坐标为2s/格。
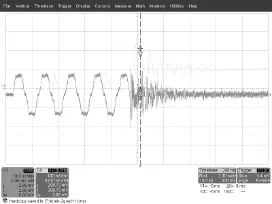
图6 电机a相定子电流和转速波形
3.2.2 电流模型下的直接转矩控制系统
参考定子磁链幅值为0.06Wb,参考转速为100rpm。先使用SPWM使电机从静止状态运行至5rpm,当转子传感器输出正确时,再切换至直接转矩控制。电机从5rpm至稳态100rpm的a相定子电流(50A/格)和转速(100rpm/格)波形如图 7所示,其中横坐标为2s/格。
图7 电机a相定子电流和转速波形
3.2.3 电压模型下的直接转矩控制系统
参考定子磁链幅值为0.06Wb,参考转速为150rpm。先使用SPWM使电机从静止状态运行至5rpm,经过一段时间后,再切换至直接转矩控制。电机从5rpm至稳态150rpm的a相定子电流(50A/格)和转速(100rpm/格)波形如图8所示,其中横坐标为5s/格。

图8 电机a相定子电流和转速波形
3.3 实验结果分析
实验结果表明两步定位法可顺利从静止状态启动永磁同步电机矢量控制和直接转矩控制系统,但由于定位过程电机旋转方向无法控制,不能应用于所有场合。SPWM开环启动法下电机旋转方向可控,且可使得电机先从静止到低速状态,然后再加速到参考转速,适用于电动汽车领域,
对于采用电压模型估算定子磁链的直接转矩控制系统,由于切换点时刻电压模型估算的定子磁链与实际定子磁链存在误差,则电机出现抖动。当两者之间的误差为零后,电机再加速至参考转速,如图9所示。因此,SPWM启动方法并不适用于采用电压模型估算定子磁链的直接转矩控制系统。
4 结论
本文针对永磁同步电机矢量控制系统和直接转矩控制系统,提出了两种简单的启动方法(两步定位法和SPWM开环启动法),并在一台15kW内置式永磁同步电机上得到了实验验证。实验结果表明两步定位法简单易行,但由于定位过程中电机旋转方向无法控制,不能应用于所有场合。SPWM开环启动法下电机旋转方向可控,且可使得电机先从静止到低速状态,然后再加速到参考转速,适用于电动汽车领域。对于采用电压模型估算定子磁链的直接转矩控制系统,由于切换点时刻电压模型估算的定子磁链与实际定子磁链存在误差,则电机出现抖动。当两者之间的误差为零后,电机再加速至参考转速。因此,SPWM开环启动方法并不适用于采用电压模型估算定子磁链的直接转矩控制系统。
[1] L.Zhong,M.F.Rahman,W.Y.Hu,K.W.Lim.A direct torque controller for permanent magnet synchronous motor drives [J] .IEEE Trans.Energy Conversion.,1999,14(3):637-642.
[2] R.Dhaouadi,N.Mhan,L.Norum.Design and implementation of an extended Kalman filter for the state estimation of a permanent magnet synchronous motor [J] .IEEE Trans.Power Electronoics.,1991,6(3):491-497.
[3] M.E.Haque,L.Zhong,M.F.Rahman.A sensorless initial rotor position estimation scheme for a direct torque controlled interior permanent magnet synchronous motor drive[J] .IEEE Trans.Power Electronics.,2003,18(6):1376-1383.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年6期)2020-12-14
测控技术(2018年2期)2018-12-09
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电机与控制应用(2015年10期)2015-03-01
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
电力工程技术(2014年1期)2014-03-20
