
基于全球定位系统的舰载三坐标雷达动态标校方法
2012-09-20 02:16段静玄郑剑飞赵复政
中国舰船研究 2012年4期
段静玄 郑剑飞 赵复政 李 蕾
中国舰船研究设计中心,湖北武汉430064
0 引 言
舰载三坐标雷达用于搜索和跟踪空中目标,是舰载作战系统防空反导最重要的信息源之一,其主要任务是探测空中目标的方位、距离和仰角这3个参数,作为整个作战系统的前端,其探测精度直接关系到武器系统的打击精度,影响着舰艇的作战效能和生存能力。所以,在舰载作战系统试验中,通常需要进行雷达标校,以检查其探测精度,消除或减小系统误差。雷达标校一般包括静态和动态2种:静态标校法[1]是通过标校站的多个固定观测点与标校点的光学测量等手段来考核雷达精度,标校站场地选择困难,技术复杂,且覆盖的角度范围较小,难以全面考核;动态标校一般与舰艇航行试验结合,配合空中目标实施,本舰与目标都处于运动状态,但由于受仪器本身的限制,传统的静态光学标校手段在动态条件下显得力不从心。在动态标校方法中,可以利用全球定位系统(GPS)差分后处理的标校方法满足动态条件的要求,但是会增加人工运输原始数据的保障要求,损失雷达标校的实时性。如果采用广域差分GPS的标校方法,虽能满足动态性和实时性的要求,但又常常依赖于外部GPS差分改正信号的质量,且标校精度不及GPS的RTK模式。所以,必须研究一种既能适应动态条件,又能满足高精度要求的标校方法[2-3]。受李维林等[4]提出的利用GPS测量系统完成舰载导航系统的动态航向对准的启发,研究了一种基于GPS的舰载三坐标雷达动态标校方法,并进行了系统实现。在系统研制过程中,采用了文献[5-7]的部分研究成果,并结合舰载三坐标雷达标校工作实际,利用GPS的RTK模式具有精度高、自主性强、动态适应性好的优点,组建了三坐标雷达动态标校系统。该系统提高了标校精度,减少了对外部GPS差分改正数据的依赖,并利用全站仪对系统的标校精度进行了试验检查,确保了系统的适用性。
1 利用GPS系统进行雷达标校的一般过程
通过舰载三坐标雷达探测目标获取目标探测值,通过架设在本舰及目标上的GPS定位系统获得目标与本舰的位移向量,以GPS定位系统的测量值为真值,通过数理统计得到数据样本的统计平均和统计标准偏差,进而对雷达测量误差进行修正。
2 GPS的RTK模式测量原理
近年来,GPS载波相位测量技术得到了长足发展,实时动态定位精度已达到分米级甚至是厘米级,通过坐标转换和数据修正,即可得到高精度的目标参数值,使得GPS应用于三坐标雷达标校成为可能。
高精度的GPS测量均采用载波相位观测值,RTK定位技术就是基于载波相位观测值的实时动态定位技术,它能实时提供被测点在指定坐标系中的三维定位结果,并达到厘米级精度[8]。在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级的定位结果。流动站可以处于静止状态,也可以处于运动状态;可在固定点上先进行初始化后再进入动态作业,也可在动态条件下直接开机,并在动态环境下完成整周模糊度的搜索求解。在整周未知数解固定后,即可进行每个历元的实时处理,只要能保持4颗以上卫星相位观测值的跟踪和必要的几何图形,流动站便可随时给出厘米级定位结果。RTK技术的关键在于数据处理技术和数据传输技术,RTK定位时,要求基准站接收机能实时地将观测数据及已知数据传输给流动站接收机,一般都要求9 600的波特率。当前,国际上普遍采用UHF电台播发差分信号,其频率范围为450~470 MHz。根据电磁波理论,它的传输属于一种视距传输(准光学通视),其最大传输距离由接收天线的高度、地球曲率半径以及大气折射等因素决定。在沙漠、戈壁、平原、海域等地区,正常通信距离可达20 km以上。
3 基于RTK模式的舰载三坐标雷达标校方法
3.1 系统组成和原理
根据三坐标雷达标校的具体情况,本文设计的RTK标校系统由基站、A移动站、B移动站组成。如图1所示,其中基站架设在岸基高处,A移动站架设在本舰雷达三坐标雷达中心,B移动站架设在目标等效反射面中心。A移动站和B移动站通过电台接收基站电台发送的RTCM差分改正数据,B移动站输出的定位、时间信息通过电台在另一频段发往数据处理系统,位于本舰的数据处理系统同时接收A移动站和B移动站的定位数据和时间信息,并实时解算目标相对于本舰的方位、距离和仰角等数据。
由于GPS的坐标系统采用的是WGS-84大地坐标,使用时需要将2个GPS的(Φ,λ,h)坐标值转换到2个GPS的相对位移向量,即相对方位、仰角和距离。转换的方法很多,本文将仅介绍比较常用的一种。首先将GPS的大地坐标系转换为直角坐标系(二者都基于同一个椭球模型),计算出空间距离真值,然后再通过向量计算将直角坐标系转换为以本舰为原点的站心坐标系,求得方位和仰角真值。
3.2 大地坐标系(Φ,λ,h)转换为直角坐标系(x,y,z)
A移动站和B移动站的GPS输出的定位数据为纬经高(Φ,λ,h)数据,在计算空间距离时,需要转化为地心地固直角坐标系(x,y,z),两个坐标系都基于WGS-84椭球[9]。其转换公式为:

图1 标校系统的原理和组成Fig.1 Calibration principle and system architecture
其中,基准椭球长半径a=6 378 137m,基准椭球极扁率 f=1/298.257 223 563,偏心率e2=f(2-f),卯酉圆曲率半径N为:
根据转换后的本舰和目标在地心地固直角坐标系的坐标(x1,y1,z1)和(x2,y2,z2),可以很容易地计算得到两点的空间距离真值L:
3.3 直角坐标系(x,y,z)转换为站心坐标系(ENU)
直角坐标系的原点位于协议椭球的中心,而舰艇一般位于地球表面上的一点,所以采用以舰艇位置为坐标原点的坐标系更便于表达。站心坐标系通常以用户所在位置点为坐标原点,3个坐标轴分别指向相互垂直的东向、北向和天向,故又称作东北天坐标系(ENU)。站心坐标系的天向与WGS-84坐标系在此点的高度方向一致,即椭球体上穿过该点的法线方向。站心坐标系固定在地球上,是地球坐标系的一种。本文将通过利用站心坐标系来计算目标在本舰处的观测矢量中的方位和仰角。如图2所示,当在本舰P处观察目标S时,其连线与水平面的夹角θ即为目标的仰角,其连线在水平面的投影与真北的夹角α即为目标的方位。

图2 站心坐标系Fig.2 The ENU coordinate system
P到S的观测向量为:
观测向量[ΔxΔyΔz]T可等效地表达在以P点为原点的站心坐标系中的向量[ΔeΔnΔu]T内,其变换关系为:
变换矩阵K为:
式中,Φ、λ、h分别为大地坐标系中的纬度、经度和高度数据。
有了在本舰位置P的观测向量[ΔeΔnΔu]T,便可直接计算目标S点相对于本舰的方位与仰角。

3.4 真值与测量值比对的时空同步方法
在动态条件下进行三坐标雷达的标校,目标位置参数随时间变化,必须考虑真值和雷达测量值之间的时间对齐问题。
在现役舰艇中,舰载的各种武器装备一般都采用了高精度的时间统一设备,雷达在输出航迹信息时带有时间信息。同时,GPS的A移动站和B移动站在输出定位信息时也会输出时间信息,两个移动站都选择GPS时间作为统一的时间基准。
数据率不同也会影响时间的对齐,本文所涉及的GPS定位数据输出频率有1,10 Hz两种,而三坐标雷达在不同模式下分别有1,2,4 Hz等不同的数据率。当收到的GPS定位数据与收到的雷达探测航迹时间不精确一致时,就会导致时间不对齐的问题。在目标运动的情况下,时间不精确对齐就会影响标校的精度。因为任何运动物体都有保持原运动规律的趋势,所以,本文采用线性插值算法对比较时间进行对齐[10]。
4 基于动态标校方法的工程实现及精度分析
按照前述方案,本文采用3台Septentrio双频GPS和5台PDL电台组建自主RTK标校系统,并编制了数据处理软件。将其中一台Septentrio GPS设置为基准站,另外两台分别设置为A移动站和B移动站,基准站通过电台向两台移动站发送差分改正数据。两台移动站收到改正数据后,在接收机内部进行差分处理,然后向外发送GPS定位数据。数据处理软件实时接收两移动站差分后的定位数据,并解算为方位、距离和仰角数据。数据处理软件界面如图3所示。

图3 三坐标雷达标校软件界面Fig.3 An interface of the three-dimensional radar calibration software
数据处理软件通过2个串行接口实时接收A移动站和B移动站的定位数据,以及UTC时间信息。由于位于目标上的B移动站需要通过电台远距离传输数据和信息到本舰数据处理计算机上,可能会存在数据延时和丢帧现象,所以在数据处理上,需要利用B移动站的时间信息来寻找A移动站上对应的定位数据,再进行相应的解算。数据处理软件还可以查看两个被测点的卫星情况和定位模式信息。
为了检查RTK标校系统的测量精度,本文将根据大地测量成果建立方位基准,通过高精度全站仪测得两移动站的相对距离、方位和仰角数据。以全站仪所测量的方位、距离和仰角为标准值,比较RTK标校系统相对位移向量的测量精度。实际测量基线长约1 km,RTK标校系统与全站仪测得的方位、距离和仰角差值如表1所示。从本文采用的计算方法可以看出,GPS的定位精度直接影响着两移动站的相对距离、方位和仰角精度。在两移动站定位精度给定的情况下,距离越远,标校系统的方位、仰角精度就越高。
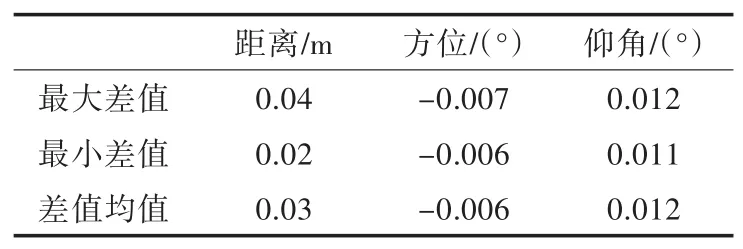
表1 RTK标校系统与莱卡1201全站仪数据差值Tab.1 Statistic errorsbetween RTK calibration system and Leica 1201 total station
本文所使用的全站仪在1 km的距离内误差不超过5mm,角度测量精度—测回中误差不超过1″。从表1的比对数据可以看出,RTK标校系统的距离误差在4 cm以内,角度误差在0.013°以内,满足三坐标雷达标校任务的需要。
5 结 语
本文针对舰载三坐标雷达标校的实际需求,提出了一种新的舰载三坐标雷达标校方法,将成熟的GPS定位技术、无线电传输和计算机技术有机结合,通过系统集成、坐标变换及时空统一来完成雷达标校。同时,本文设计并实现了三坐标雷达标校系统并对系统精度进行了试验检查。精度试验表明,由于采用了GPS的RTK模式,该系统的距离标校误差不大于4 cm。本文的研究成果不但适用于三坐标雷达标校要求,也可覆盖普通的两坐标雷达的标校需要,为舰载雷达标校提供了一种新的选择。随着舰载雷达标校精度和对环境要求的不断提高,这种基于GPS的RTK模式的舰载雷达动态标校方法和技术在未来的实际应用中将发挥重要作用。
[1]刘高峰,刘健.基于GPS定位系统的舰船雷达标校系统研究[J].舰船科学技术,2006,28(6):100-102,114.
LIU G F,LIU J.Research on shipborne radar calibration system based on GPS positioning system[J].Ship Science and Technology,2006,28(6):100-102,114.
[2]陈相麟,蒋谱成,蒋寿庭,等.雷达试验[M].北京:国防工业出版社,2004.
[3]陆林根,张志英,常永生,等.防空导弹武器系统制导站系统工程[M].北京:宇航出版社,1996.
[4]李维林,李蕾,唐伟方.基于GPS测量系统的舰载作战系统动态航向对准技术研究[J].中国舰船研究,2009,4(4):68-71.
LIW L,LI L,TANGW F.Dynamic course alignment on ship-board combat system based on GPSmeasure system[J].Chinese Journal of Ship Research.2009,4(4):68-71.
[5]姚景顺,杨世兴.舰载雷达的动态标校[J].火力与指挥控制,2008,33(3):128-129.
YAO J S,YANG S X.Dynamic precision adjusting shipboard radar[J].Fire Control and Command Control,2008,33(3):128-129.
[6]赵馨,王世峰,佟首峰,等.舰载雷达零位标校方法[J].现代防御技术,2009,37(2):119-120.
ZHAO X,WANG SF,TONG SF,etal.Method on zero position calibration of shipborne radar[J].Modern Defence Technology,2009,37(2):119-120.
[7]李兴民,朱家移,赵贤超.战术导弹火控雷达零位标校方法研究[J].战术导弹技术,2004,3(1):55-58.
LIX M,ZHU JY,ZHAO X C.Research on zero position calibration method of fire control radar of tactical missile[J].Tactical Missile Technology,2004,3(1):55-58.
[8]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009:157-158.
[9]徐绍铨,张华海,杨志强,等.GPS测量原理及应用[M].武汉:武汉大学出版社,2001:79-89.
[10]沙定国.实用误差理论与数据处理[M].北京:北京理工大学出版社,1993.
猜你喜欢
导航定位学报(2022年2期)2022-04-11
初中生世界·九年级(2020年2期)2020-04-10
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
科技视界(2016年15期)2016-06-30
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
