
基于STM8S208RB的空调压缩机控制器的研制
2012-09-19 10:28曹健安张中炜朱晓锋冯宇晟
电子设计工程 2012年1期
曹健安,张中炜,朱晓锋,冯宇晟
(1.东华大学 信息科学与技术学院,上海 201620;2.上海辉度智能系统有限公司 上海 201620)
无刷直流电机具有结构简单、效率高、功率因数高、转动惯量小,低噪音等优点。近年来,永磁无刷直流电动机的研究和应用越来越受到人们的重视[1],随着国家对节能减排的重视。越来越多的空调厂商把无刷直流电动机应用在变频空调压缩机中。在传统的无刷直流电机驱动控制系统中,都需要转子位置和速度信息作为反馈信号,而转子位置、速度的取得几乎都是利用光电编码器、旋转变压器等精密的机械装置获得。在空调压缩机中,由于制冷剂的强腐蚀性,常规的位置传感器很难正常工作,因此,研究一种可靠的,低成本的无位置传感器的控制方法,成为无刷直流电机控制器研究的热点之一。文中采用ST公司近年来推出的低成本、高性能的STM8S208RB微处理器作为控制核心,采用片内AD直接采样非导通相的端电压作为检测方案,具有较高的性价比,实现了变频空调控制器的设计。
1 意法半导体STM8S208RB单片机简介
STM8S208RB是意法半导体一种高性能内核的单片机,具有增强的Harvard&CISC架构,运行速度高,处理能力强,具有丰富的片内外设,便于使用和模块化设计,被广泛应用于无刷直流电机的控制。该单片机具体性能指标如下:1)内核:2.95~5.5 V 的宽工作电压,-40~+125°C 工作环境温度,具有3级流水线结构,在24 M晶振频率工作时,可达20 MIPS。2)程序存储器:最多128 K字节Flash;10 K次擦写后在55°C环境下数据可保存20年。数据存储器:多达2 K字节可擦写数据存储区eeprom,可达30万次擦写;RAM:多大6 K字节;3)定时器:2个16位通用定时器,1个16位高级控制定时器,带4个CAPCOM通道,3个互补输出,死区插入和灵活的同步功能。4)可达16个通道的10位A/D转换器,最小转换时间[2]为 2.33 μs。
2 无刷直流电机无位置传感器控制技术
2.1 空调压缩机及无刷直流电机的组成结构
在使用无刷直流电机的空调压缩机系统中,主要由压缩机、电机和控制器3个部件分组成。无刷直流电机[3]的电机本体类似于永磁同步电机结构,其定子是电枢,转子是永磁体,稀土永磁材料的使用,大大减小了无刷直流电机的重量、简化了结构、提高了性能,相比普通直流电机,它去掉了由换向器和电刷组成的机械接触结构,采用电子开关换向装置,使其可靠性得以提高。当无刷直流电机定子绕组的某一相通以电流时,该电流产生的磁场与转子永久磁钢产生的磁场相互作用产生转矩,驱动转子旋转。驱动电路中的功率开关器件的导通次序产生的磁场是与转子转角同步的,从而起到了机械换向器的换向作用[4]。
2.2 无刷直流电机的数学模型
无刷直流电机在理想情况下具有平顶宽度120°的梯形波反电动势,电机通过电子开关输出方波电压或电流,并与电机反电动势保持适当的相位关系,从而产生有效电磁转矩,使电机运转。目前所使用的无刷直流电动机多采用三相星型绕组,工作在两两导通、三相六状态方式下,如图1所示。
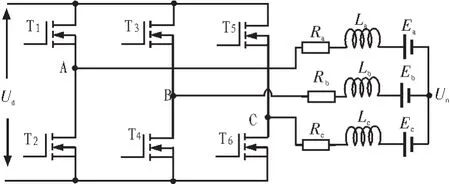
图1 三相逆变桥电路Fig.1 Three phase inverter with UVW connected load
对于采用绕组Y型联结,三相六状态120°两两通电方式的永磁无刷直流电动机。假设无刷直流电机三相绕组对称[4],则三相电压方程可以表示为:
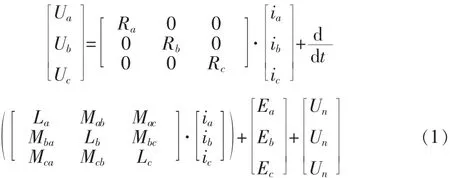
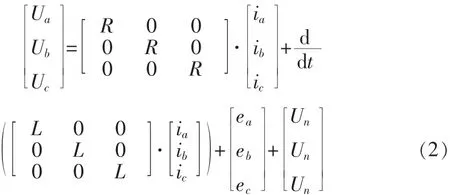
式中 Ua,Ub,Uc电机三相绕组对地电压 (端电压);ia,ib,ic电机三相绕组电流;Ea,Eb,Ec,电机三相绕组反电动式;Ra,Rb,Rc电机三相绕组电阻;La,Lb,Lc电机三相绕组的自感;Un为中性点对地的电压;Mab为A相绕组和B相绕组的互感,其他同理。 由假定可知,Ra=Rb=Rc=R;La=Lb=Lc=Ls;Mab=Mac=Mba=Mbc=Mca=Mcb=M;ia+ib+ic=0;如果令 L=Ls-M,代入公式,整理得:
2.3 反电动势过零检测技术
永磁无刷直流电机的运行需要检测转子位置信号来实现换相,在空调压缩机系统中,通常使用无位置传感器技术。无位置传感器的方法有反电势法、磁阻法、磁通链变化法、电感法[4-5];上述各种转子位置信息检测方法均有各自的优点及缺点,需要根据具体情况综合其优缺点提出合理的方案。针对空调压缩机对无刷直流电机对可靠性、稳定性的要求较高、对精确性要求较低的特点,在本系统中使用检测反电势过零点方法进行转子位置信息检测。系统采用二二导通、三相六状态导通方式、调制方式为H-PWM-L-ON即上桥臂开关管斩波,而另一导通相下桥臂开关管常通[6]。
设电机处于 120°导通状态;在 PWM“ON”状态,T1、T4 导通,如图 2所示;在 PWM“OFF”状态,T6导通,T1关断,如图3所示。
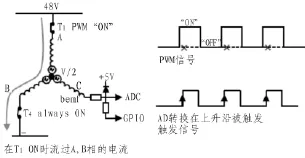
图2 上桥臂PWM“ON”时过零点采样时刻Fig.2 Sampling time of zero crossing point during PWM“ON”
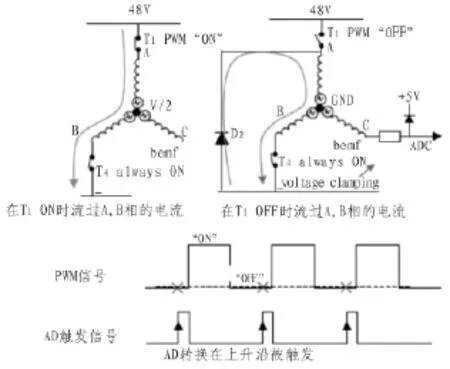
图3 上桥臂PWM“OFF”时过零点采样时刻Fig.3 Sampling time of zero crossing point during PWM “OFF”
1)PWM开通时过零检测法
在 PWM“ON”状态,T1、T4 导通,如图 2 所示,三相端电压表达式如下:
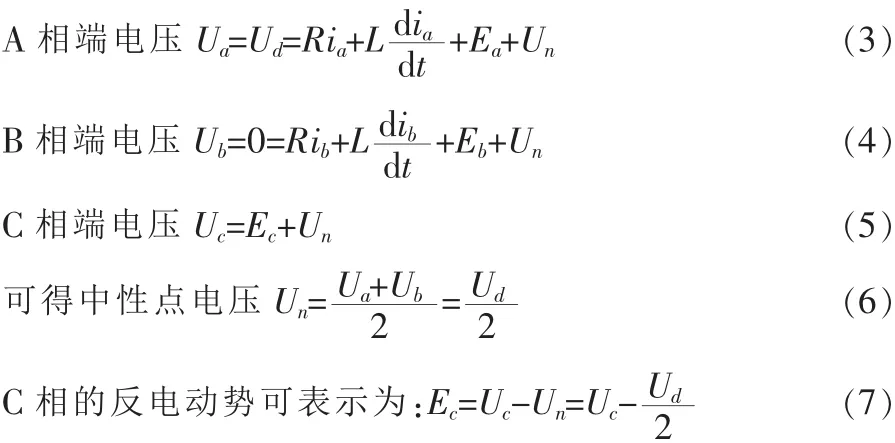
根据以上公式,知道在PWM“ON”时只要检测到C相端电压等于Ud/2时,就是C相的过零点。
2)PWM关断时过零检测法
在PWM关断状态,T1关断,T4导通,此时电流流过T2内部的体二极管如图3所示,由图可得

此时中性点电压Un=0;C相反电动势为Ec=Uc;根据以上公式,知道在PWM“OFF”时检测到C相端电压为0时,就是C相的过零点。图4为PWM“OFF”和PWM“ON”情况下的端电压和过零点实测图。

图4 PWM“ON”和 PWM“OFF”过零点实测图Fig.4 Zero crossing point waveform for PWM“ON”and“OFF”
2.4 快速退磁技术
为正确检测到反电动势过零信号,必须在检测之前确保断电相电流尽快衰减,即断电相退磁。当控制无刷直流电机换相时,由于绕组线圈电感的作用,断电相绕组的电流不能马上衰减到零,由于反并联二极管的续流作用,该相端电压被箝位至0 V或者高压,因此在退磁期间无法进行反电动势过零检测。所以必须加速退磁过程,保证电机稳定性。断电相续流过程可以等效成该相电感与电压源并联并为之充电,因此如果在换相时刻给关断相施加反向电压,则能加速退磁过程 ,具体过程可参考文献[7]。实验发现,采用加速退磁技术后大大缩短了退磁时间,提高了反电动势过零信号检测的准确性,增强了系统运行的稳定性。采用加速退磁技术前后的无刷直流电机三相端电压和过零点实验波形如图5所示。
3 硬件设计
搭建了基于STM8S208RB的变频空调控制器的电路,主要包括电源电路、功率驱动电路、过流差分放大电路、过零点检测电路等(限于篇幅省略STM8S208RB最小系统图和电源部分)。

图5 快速退磁三相端电压波形和过零点信号Fig.5 Three phase voltage and zero crossing point for Fast demagnetization
3.1 驱动电路
驱动电路如图6所示,IR2101是IR公司生产的一款高性价比驱动器,使用方法非常简单,性价比高,能输出100-210 mA电流。IR2101驱动器可驱动一组功率管,整个功率电路只需3片即可,这样不但节约制造成本,而且还提高系统稳定性[8]。
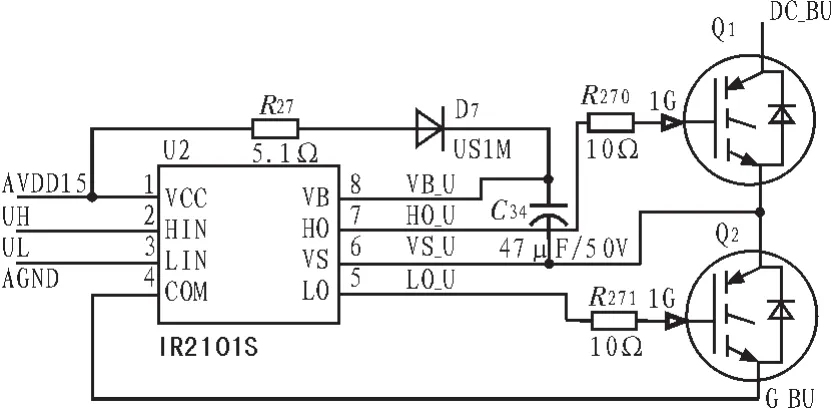
图6 驱动电路Fig.6 Driver circuit of IR2010S
3.2 过流反馈与过流保护电路
电流反馈与过流保护监测电路如图所示。母线上的电流通过2毫欧,并通过l mV358进行差分放大,通过一阶滤波后输入给STM8S的片内AD采样输入端;并同时将此电流信号连接到比较器lm2903,用于电机过流保护检测,当母线电流过大设定的过流保护阈值时,微处理器进入过流保护状态。
3.3 过零点检测电路
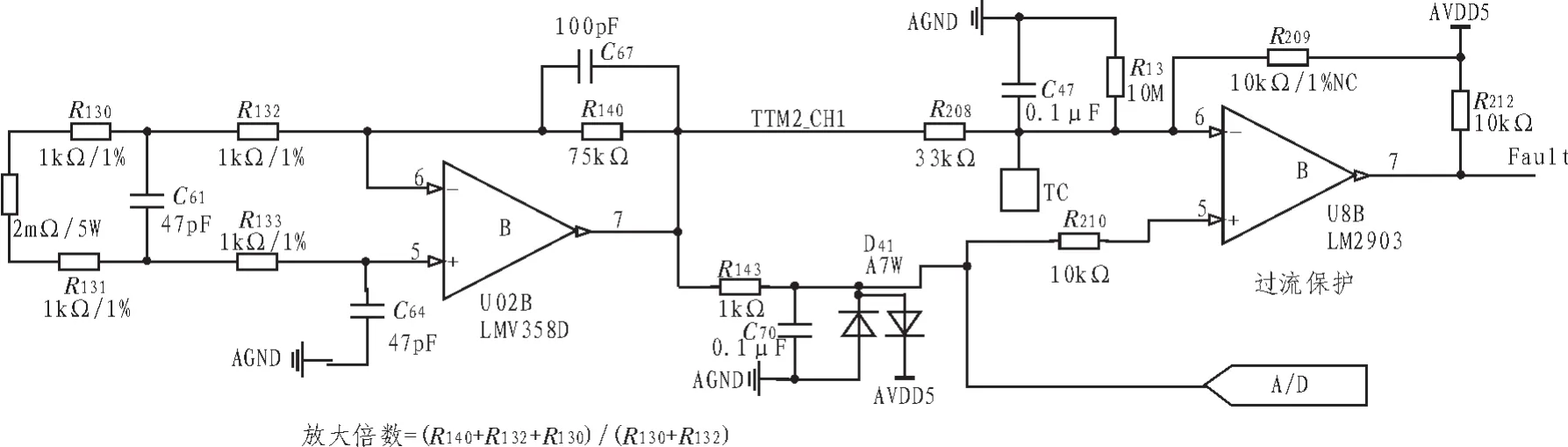
图7 电流反馈和过流保护电路Fig.7 Current feedback and protection circuit
过零点检测电路如下图所示,图8为U相过零点检测电路,其中PHASE_U连接电机的U相,Z_MS_U为单片机的GPIO控制信号,ZDtet_U连接STM8S的AD口,三极管Q31起到对AD口过压保护和射极跟随的作用,提高输入阻抗。R91和D20起到对三极管基极加速放电的作用,当PWM“ON”时,Z_MS_U为低电平,R92,R93和 R89构成分压电路,当 PWM“OFF”时,Z_MS_U为高阻抗,R89不起作用,电机反电动势信号直接通过Q31进入AD采样端。
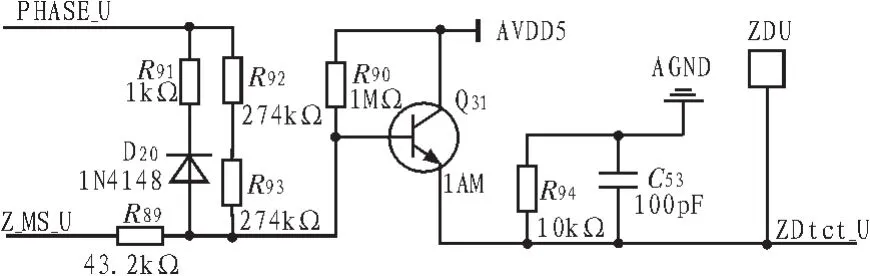
图8 过零点检测电路Fig.8 Zero crossing point detection circuit
4 实验环境
一套完整的48 V空调压缩机系统测试平台如图9所示;系统的供电电压为48 V,无刷直流电机的额定功率为600 W,额定转速3600转/分钟。功率器件采用IR公司的IRFB4310。VDSS=100 V,Rds(on)=5.6 mΩ,Id=140 A (Tc=25°),Id=97 A(Tc=100°)。

图9 实验测试平台Fig.9 Air-conditioner compressor experiment platform

表1 实验压缩机电机参数Tab.1 Air-conditioner compressor BLDCM parameters
5 结 论
本系统通过采用H-PWM-L-ON调制方式,利用快速退磁技术完成了无刷直流电机的稳定运行和无失步换相的目标。并通过三段式起动方式,完成无刷直流电机静态时的起动,实现了反电势检测法在无位置传感器无刷直流电动机控制系统中的应用。实验结果表明,所使用的过零点检测方法在压缩机负载下能够很好地工作。
[1]张琛,直流无刷电动机原理及应用[M].北京:机械工业出版社,2004.
[2]ST Microelectronics.UM0708 User manual STM8Sxxx threephase BLDC motor control software library V1.0.[EB/OL].(2009).www.st.com.
[3]韩瑞,赵创社,刘建伟,等.基于DSP的两相无刷直流电机转速控制系统[J].现代电子技术,2009(13):126-128,133.
HAN Rui,ZHAO Chuang-she,LIU Jian-wei,et al.Speed control system of two-phase brushless DC motor based on DSP[J].Modern Electronic Technique,2009(13):126-128,133.
[4]郑吉,王学普.无刷直流电机控制技术综述[J].微特电机.2002(3):12-14.
ZHENG Ji,WANG Xue-pu.The summary of the control technology of brushless DC motor[J].Small&Special Electrical Machines,2002(3):12-14.
[5]李自成,程善美,蔡凯,等.反电动势过零检测无刷直流电机转子位子新方法[J].电工技术学报,2009,24(7):52-57.
LI Zi-cheng, CHENG Shan-mei, CAI Kai, et al.A novel scheme of sensing rotor position of BLDCM based on the Zero-crossing of BACK EMF [J].Transactions of China Electrotechenical Society,2009,24(7):52-57.
[6]孙承波.空调永磁同步压缩机控制系统研究 [D].上海:上海大学,2008.
[7]ST Microelectronics.AN1129 PWM Management for BLDC Motor Drives Using The ST72141.[EB/OL].(2005)www.st.com
[8]柯建伟,周嘉农,姚雪峰,等.用于机器人伺服电机的PWM功率接口的设计与实现[J].昆明理工大学学报:理工版,2003,28(3):86-88.
KE Jian-wei,ZHOU Jia-nong,YAO Xue-feng, et al.Design and implementation of PWM power interface used in robot motor servo control system[J].Journal of Kunming University of Science and Technology Science and Technology,2003,28(3):86-88.
猜你喜欢
大电机技术(2022年5期)2022-11-17
防爆电机(2022年4期)2022-08-17
莆田学院学报(2021年5期)2021-11-13
微电机(2020年3期)2020-05-14
甘肃科技(2020年20期)2020-04-13
电子制作(2017年1期)2017-05-17
电测与仪表(2016年1期)2016-04-12
电测与仪表(2016年15期)2016-04-12
轴承(2015年6期)2015-07-26
淮南师范学院学报(2015年3期)2015-03-22
