
证据理论在汽轮机转子故障诊断中的应用
2012-09-19 13:24程加堂徐绍坤
自动化仪表 2012年11期
程加堂 艾 莉 徐绍坤
(红河学院工学院,云南 蒙自 661199)
0 引言
汽轮机组是一个集机、电、液于一体的复杂系统,它是电力工业中的关键设备。降低汽轮机组的故障,提高其可靠性是保证电力系统安全运行的前提。作为整个系统的核心部分,汽轮机转子在长期连续高速的旋转过程中,将不可避免地出现故障。因此,研究汽轮机转子的故障诊断技术具有重要的现实意义。
由于在某些故障征兆下,各个故障都有一定的发生概率。通过信息融合,将发生概率最大的判定为主要故障,可提高诊断精度,所以证据理论特别适合处理信息融合的故障诊断问题[1]。因此,研究人员将证据理论应用于直流电机及航空发动机的故障诊断中[2-3],取得了较好效果。
本文利用灰色神经网络对汽轮机转子进行局部故障诊断,并将诊断结果作为证据体。根据证据理论[4-7],对各证据体进行合成,并计算它们的基本可信任分配函数,从而判定故障类型。
1 证据理论
1.1 基本概念
设Θ表示有限个证据信息X所有可能结果组成的集合,且集合内的元素相互独立,则称Θ为X的识别框架。Θ中的所有可能的集合用幂集2Θ表示。若集函数 m:2Θ→[0,1],且满足:

则称m为辨识框架Θ上的基本可信任分配函数,m(A)为A的基本概率赋值,它表示对命题A的精确信任程度。
如果A为Θ的子集,且m(A)>0,则称A为证据的焦元,所有焦元的集合称为核,证据由证据体[m,m(A)]组成。
由基本可信任分配函数,可定义相应的信任函数和似真度函数为:

式中:Bel(A)表示A为Θ的信任函数,信任函数又称下限函数,表示对A的总信任度;似真度函数Pl(A)也称为上限函数,表示不否定命题A的程度或者说发现A可靠或似真的程度;A的不确定性由u(A)=Pl(A)-Bel(A)来表示,置信区间为[Bel(A),Pl(A)],表示对A的不确定区间。
1.2 组合规则
设Bel1和Bel2是同一识别框架Θ上的两个信任函数,m1和m2分别是其对应的基本可信任分配函数,焦元分别为 A1,A2,…,Am与 B1,B2,…,Bn,并且:

式中:i=1,2,…,m;j=1,2,…,n。
此时,m1和m2可以组成一个新的基本可信任分配函数m=m1⊕m2,相应的信任函数用(Bel1⊕Bel2)表示,信任函数的大小可通过(m1⊕m2)来计算 。这时,合成后的基本可信度分配函数为:

式中:k为证据间的冲突程度。当k≠1时,m(C)有一个确定的概率赋值;否则,认为m1与m2矛盾,不能对它们进行组合。对于多个证据的组合情况,需要逐个进行两两组合。此外,由组合所获得的最终证据与组合时的次序无关。
2 证据理论融合算法
2.1 灰色神经网络
灰色神经网络是指将灰色系统理论和神经网络相结合的一种算法,目的是使两者优势互补,更好地解决复杂的不确定性问题。其建模的思路为:先用灰色建模方法进行累加处理,使原始数据序列呈单调增长趋势,以便神经网络进行逼近;再基于BP网络建立对象的预测模型;最后经累减还原后即得预测值。这种方法发挥了灰色模型中累加生成的优点,增强了原始数据序列的规律性,提高了系统建模的效率与模型的精度。从结构上看,两者的结合为“串联”型。该模型又可称作串联灰色神经网络模型[8]。
2.2 算法实现流程
汽轮机转子的故障类型复杂多样,具有渐变和不规则性。如果仅仅从某一方面进行故障诊断,结果往往不完备。为此,本文采用证据理论混合算法的故障诊断方法,充分利用传感器信息,提高了故障诊断准确度。故障诊断系统的流程如图1所示[9]。
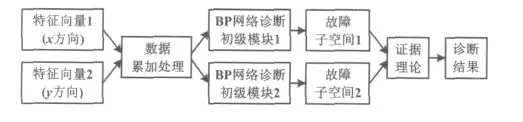
图1 故障诊断流程图Fig.1 Flowchart of fault diagnosis
3 算法应用实例
3.1 特征量提取
汽轮机是大型的旋转机械,振动信号是其非常重要的特征信号。因此,汽轮机转子的故障诊断总是从振动信号入手,并从中提取故障征兆,从而建立故障征兆集合与故障集合的映射关系。
选取汽轮机转子常见的4种故障类型,即不平衡、不对中、碰磨、松动(分别用 y1、y2、y3、y4表示)作为故障识别框架,并在局部故障诊断中定义故障类型的编码为:不平衡(1 0 0 0)、不对中(0 1 0 0)、碰磨(0 0 1 0)、松动(0 0 0 1)。在发生这些故障征兆的基础上,选取x方向、y方向的8种故障特征参数,即(0 ~0.375)f、(0.375 ~ 0.75)f、(0.75 ~ 0.937 5)f、(0.937 5 ~ 1.125)f、(1.125 ~ 1.5)f、(1.5 ~ 3.0)f、(3.0 ~5.0)f、>5.0f(其中 f为基频)作为该识别框架的证据体[10],分别用 x1,x2,…,x8表示。部分样本故障数据如表1所示。

表1 部分样本故障数据Tab.1 Part of the sample data
3.2 局部故障诊断
对各个传感器检测的振动信号进行特征提取,并经过归一化及累加生成处理后,分别作为2个并行的BP神经网络的输入样本。训练后的网络输出经过累减还原后,即为局部故障诊断结果。试验中,子网结构均为8 -12 -4,训练目标为 0.000 1,置信门限设为 0.9。下面以汽轮机转子不平衡故障为例,具体说明该故障诊断方法的有效性,网络输出如表2所示。

表2 输出结果比较Tab.2 Comparison of outputs
根据所定义的故障编码规则可知,在x和y方向上,出现不平衡故障的概率最高。因此,采用灰色建模方法对数据进行相应处理后得到的数据与单纯采用BP神经网络相比,其诊断结果更接近期望值。
3.3 决策故障诊断
对子网输出进行归一化处理,再对可能出现的不平衡、不对中故障进行证据组合后,得到的不同子网络的可信度分配如表3所示。
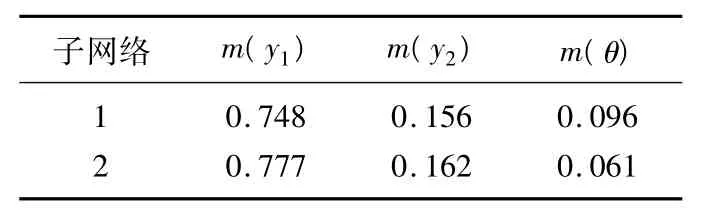
表3 可信度分配Tab.3 Credibility distribution
表3中,m(y1)表示对故障y1的信任度,m(y2)表示对故障y2的信任度,m(θ)表示故障类型的不确定度。此时,2个子网络故障诊断的可信度值均小于0.9,对于是否出现不对中故障尚不能完全排除。当k=0.242 39时,子网络融合后的故障可信度分配如表4所示。

表4 融合结果Tab.4 Fusion results
比较表3与表4可知,融合后发生不平衡故障y1的可信度值提高,达到0.925 8,大于置信门限0.9。同时,不对中故障y2的可信度下降到0.066 4。此外,不确定度值也大幅下降到0.007 73,说明融合后故障诊断的准确性增强。此时可以确定所发生的故障类型为不平衡故障,与实际发生的故障类型相吻合。
为了评估该诊断方法的性能,分别取不同故障模式下的典型样本进行测试,置信门限仍设为0.9,结果如表5所示。

表5 典型样本诊断结果Tab.5 Diagnosis results of typical samples
从表5典型样本诊断结果可以看出,该方法提高了故障诊断的准确率。
4 结束语
对汽轮机转子的故障进行诊断,将故障特征量转化为证据推理问题。在采用灰色神经网络进行局部故障诊断的基础上,按照证据合成规则,实现了汽轮机转子故障诊断的最优决策。该方法有效地提高了正判率,降低了诊断的不确定性。
[1]李巍华,张盛刚.基于改进证据理论及多神经网络融合的故障分类[J].机械工程学报,2010,46(9):93 -99.
[2]嵇斗,王向军.基于D-S证据理论的直流电机故障诊断研究[J].电机与控制应用,2008,35(2):49 -51.
[3]杨建平,黄洪钟.基于证据理论的航空发动机早期故障诊断方法[J].航空动力学报,2008,23(12):2327 -2331.
[4]梁旭荣,姚佩阳,梁德磊.改进的证据组合规则及其在融合目标识别中的应用[J].电光与控制,2008,15(12):37 -40.
[5]杨志荣,周建中.一种基于D-S证据理论的水轮机故障诊断方法[J].水电能源科学,2009,27(2):152 -154.
[6]杨伟,顾明星,彭静萍.证据理论在电机故障诊断中的应用[J].电力系统保护与控制,2010,38(2):64 -67.
[7]凌六一,黄友锐,魏圆圆.基于多传感器信息融合和神经网络的汽轮机故障诊断研究[J].中国电力,2010,43(3):46 -49.
[8]石为人.基于灰色神经网络建模的水质参数预测[J].计算机应用,2009,29(6):1529 -1535.
[9]贺建军,赵蕊.基于信息融合技术的大型水轮发电机故障诊断[J].中南大学学报:自然科学版,2007,38(2):333 -337.
[10]谷敬佩,梁平.基于小波包分析和信息融合技术的汽轮机转子故障诊断[J].汽轮机技术,2010,52(4):300-302.
猜你喜欢
一重技术(2021年5期)2022-01-18
能源工程(2021年6期)2022-01-06
能源工程(2021年3期)2021-08-05
小学生学习指导(低年级)(2020年3期)2020-06-02
电子制作(2019年22期)2020-01-14
电子制作(2018年10期)2018-08-04
Coco薇(2017年2期)2017-04-25
Coco薇(2017年2期)2017-04-25
山东工业技术(2016年15期)2016-12-01
北京航空航天大学学报(2016年6期)2016-11-16
