
长度计量基础知识讲座(三十五)
2012-09-07 01:55顾耀宗上海市计量测试技术研究院
上海计量测试 2012年4期
顾耀宗/上海市计量测试技术研究院
第三十五讲 触针式表面粗糙度测量仪
1 结构和工作原理
触针式表面粗糙度测量仪(以下简称仪器)通常由底座、传感器、驱动器、电子信号处理装置、计算机、打印机等部分组成。图1为常用仪器结构示意图。
仪器驱动箱可通过顶部水平调节钮作±10°的水平调整,内部安装了一个40 mm行程的高精度直线基准导轨,传感器可沿导轨做直线运动。仪器配置专用测量软件,可选定被测零件的不同位置,设定各种测量长度进行自动测量。评定段内采样数据点达3000个。电脑和打印机可显示或打印各种粗糙度参数及轮廓的支承长度率曲线等。
仪器的驱动器带动传感器沿被测表面做匀速滑行,传感器通过锐利触针感受被测表面的几何形状变化,并转换成电信号。该信号经放大和处理,再转换成数字信号贮存在计算机系统的存贮器中。计算机对此原始轮廓进行数字滤波,分离出表面粗糙度并计算其参数。测量结果由显示器输出,也可由打印机输出。
2 仪器的主要技术特征
2.1 触针和测量力
触针针尖的尺寸和形状是影响获取表面轮廓信息是否真实的首要因素。然而,实际轮廓的真实性不仅与触针针尖半径和形状以及被测表面的加工沟槽有关,而且与触针的测量力、传感器的移动速度以及被测表面的硬度等因素有关。为使仪器能适应用于测量较深谷底和较小的峰谷间距,并保持一定的移动速度,必须给触针施加一定的测量力,以保证触针与被测表面在测量过程中始终保持接触。
2.2 测量基准
传感器触针的运行轨迹必须沿着被测表面基本平行的基准线移动,才能获得真实的被测轮廓形状。仪器建立测量基准的方式有独立测量基准和相对测量基准两类。独立测量基准是使传感器沿直线或一定的弧形线移动;相对测量基准是利用与传感器壳体安装成一体的导头,支承在被测表面上,所测得的轮廓信息是触针相对于导头的垂直位移量。
2.3 滤波器和传感器的移动速度
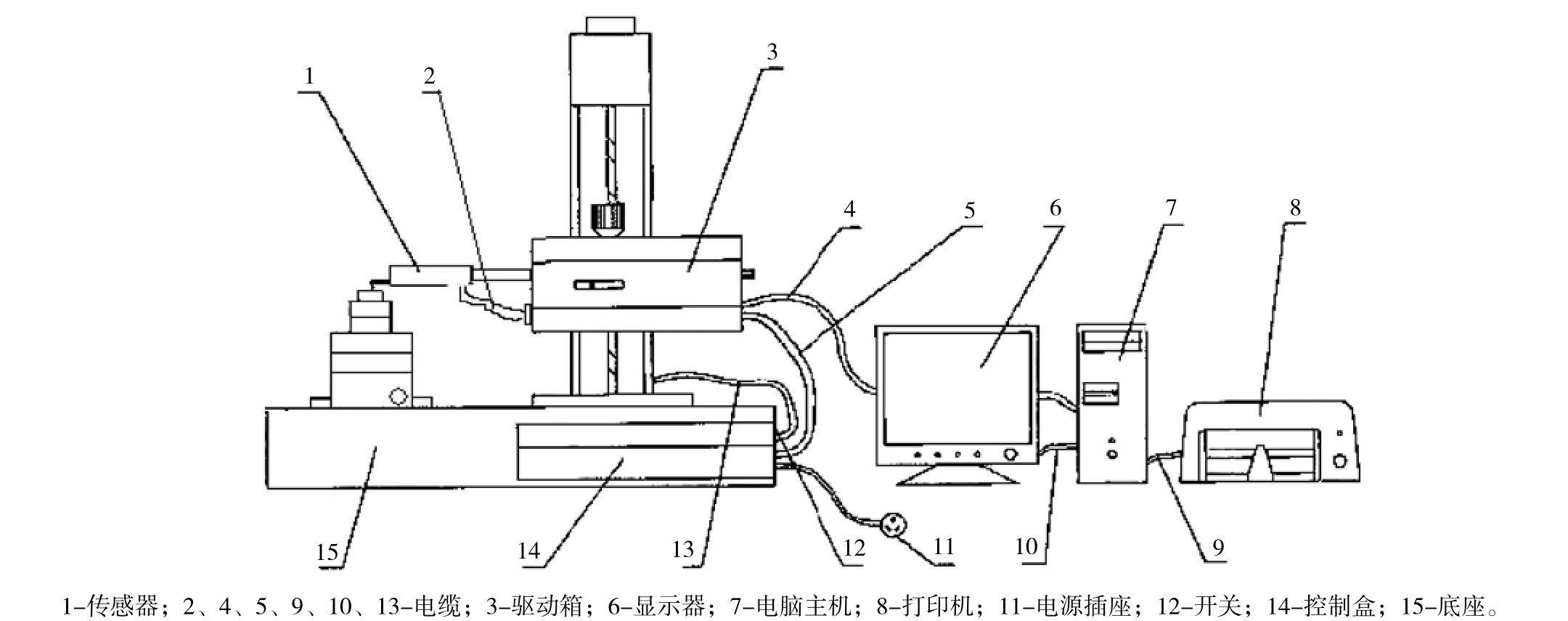
图1 触针式表面粗糙度测量仪结构示意图
仪器利用滤波器来消除或减弱表面波纹度对表面粗糙度测量结果的影响,并采用标准规定的取样长度数值作为截止波长,用“Cut-off”表示。
由触针获取并转换为电信号的频率f取决于微观不平度间距s和传感器的移动速度v,f = v/s ,这表明传感器的移动速度与截止波长有关。
3 仪器的种类
根据传感器原理的不同,触针式表面粗糙度测量仪可分为电感式、压电式、光电式、激光式和光栅式等。
根据测量基准的不同,触针式表面粗糙度测量仪可分为带导头式和无导头式。带导头式仪器只能用于测量表面粗糙度,无导头式仪器不仅可测量表面粗糙度,还可测量表面波纹度和表面形状。
根据仪器的结构、外形、重量和使用方法的不同,触针式表面粗糙度测量仪还可分为台式和便携式两种。台式仪器一般带有大理石底座,结构复杂,装夹、调整方便,测量准确度高,通常用于实验室。便携式仪器结构简单,重量轻,通常用于加工现场。
4 仪器计量特性的校准
4.1 仪器校准项目和计量特性
仪器校准项目和主要计量特性要求见表1。
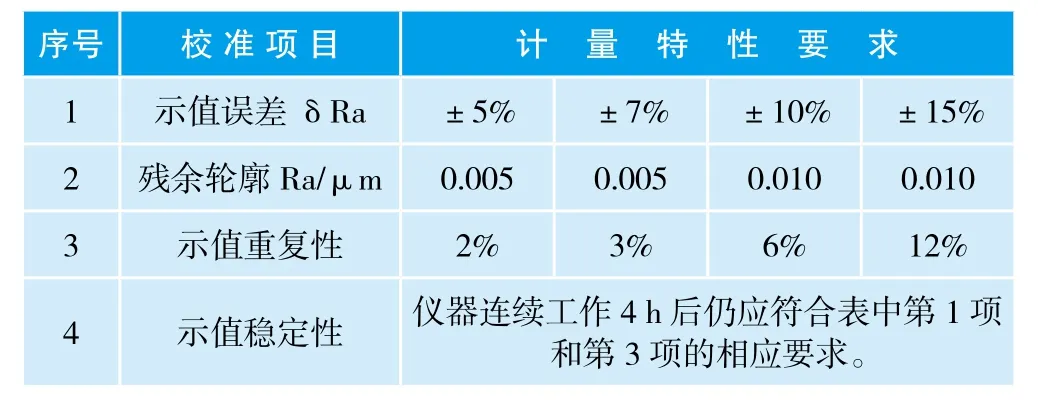
表1 校准项目和计量要求
4.2 校准方法
4.2.1 残余轮廓
选用仪器最小量程和最大放大倍数,对1级平面平晶进行测量,读取Ra值。残余轮廓是由导向基准的偏差、外部和内部的干扰、轮廓传输中的偏差等因素造成的,又称虚假信号、虚假轮廓。
4.2.2 示值误差
采用一组多分度线标准样板,在相应量程和取样长度分别对其进行测量。在样板工作区域内的三个不同位置各测量3次,取其平均值,按下式计算仪器的相对示值误差δRa。

式中:Ra ─ 测量值的平均值;
Ra0─ 多刻线标准样板检定值。
4.2.3 示值重复性
在小量程高放大倍数条件下,选用一块相应的多刻线标准样板,对样板某一固定位置重复测量10次,其最大值与最小值对测量平均值的百分比即为示值重复性。
4.2.4 示值稳定性
在小量程高放大倍数条件下,选用一块相应的多分度线标准样板,在一固定位置上,每小时按示值重复性的要求测量一次,共测4次。4 h后,再按示值误差的要求测量一次。仪器连续工作4 h后,仍能满足示值误差和示值重复性的要求。
猜你喜欢
机械工业标准化与质量(2021年7期)2021-10-12
装备制造技术(2020年1期)2020-12-25
甘肃科技(2020年20期)2020-04-13
制造技术与机床(2019年11期)2019-12-04
模具制造(2019年4期)2019-06-24
质量技术监督研究(2018年1期)2018-03-26
中国公路(2017年11期)2017-07-31
中国交通信息化(2017年4期)2017-06-06
制造技术与机床(2017年12期)2017-02-02
材料科学与工程学报(2016年2期)2017-01-15
