
主从轴运动控制中5次方曲线的设计
2012-08-29 12:06:44刘泽洋
装备制造技术 2012年7期
刘泽洋
(上海交通大学自动化系,上海 200240)
现在一般伺服运动中,如果是控制电机走固定位置的方式,上位控制系统PLC 一般都是让伺服走一个梯形的位置块。这种模式都是单轴的运动模式,在这种情况下,每个轴的运动都是独立的,而不是关联的。在这类运动方式下,如果要将2个轴或者多个轴的运动建立联系,只能通过上位PLC 将2个轴或多个轴进行逻辑关联。
例如在某个时间节点,PLC 通过逻辑判断要某2个轴一起运动,则发出一个触发信号,触发2个轴开始运行先前设定好的速度指令或者位置指令。但是在这个模式下,一旦PLC 发出触发指令后,2个轴就开始各自进行运动,在完成当前运动前,PLC 是无法进行过程干预,或者2个轴之间是无法进行速度或者位置关联的。所以,这类模式是无法保证过程中的2个轴的关联性。
如果在运行的过程中,任意一个轴的速度有变化,或者位置有波动,其他轴是无法获知这个情况,还是会根据之前的设定继续完成该步骤。
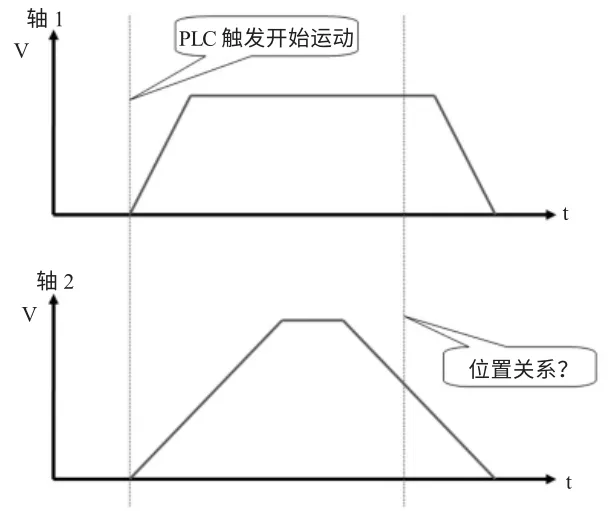
图1 PLC 控制的2 轴运动方式图
所以为了解决这个问题,市场上出现了运动控制器。运动控制器集成了原先PLC 的所有功能,同时增加了多轴的同步运动控制。
多轴的同步运动控制,就是将原先PLC 的轴和轴之前的逻辑关系,转变成了一一对应的位置关系。

图2 走位置同步的从轴块位移和速度曲线图
图2 显示的就是一条同步运动中从轴相对于主轴的位置曲线。红色的是位置曲线,蓝色的是速度曲线。用户先在程序中完成想要实现的曲线动作,然后下载到运动控制器中,运动控制器在程序运行的过程中,根据这条曲线来判断主轴和从轴的位置关系,并实时地根据主轴反馈回来的位置信号,发送对应的位置命令给从轴,从而实现了轴和轴之间的位置同步功能。
这个功能在市场上一部分运动控制器中都能够实现。但并不是说,使用了这个功能做出来的设备的效果,就一定非常好,非常完美了。
从图2 中可以发现,在伺服电机从位置零走到100%完成点的过程中,位移曲线实际上是一条由3段曲线拼接而成的。第一段是一条加速曲线,中间是段匀速区间,最后一段是条匀减速曲线。
相对应的,速度曲线也是由3 段曲线拼接完成,第一段是斜率恒定的匀加速曲线,所以速度是从0开始加速上升的;中间段是匀速过程,所以速度值是一个恒定的值;最后一段是匀减速,所以速度从匀速值开始减速下来到0。
这条曲线初看起来好像挺不错的,位移曲线比较圆滑,速度是匀加速的,也没有跳变。但是再进一步分析之后,就会发现有问题存在。

图3 走梯形位置块速度和加速度曲线图
图3 中绿色的线是加速度曲线,可以发现加速度曲线也是分成3 段的,而速度曲线的加速和减速,实际上是因为加速度曲线的改变。在速度曲线的匀加速段,加速度曲线有一个恒定的正向输出值,从0时刻开始存在,一直到匀加速段结束。在匀速运动段,加速度为零。在匀减速段中,加速度值从0 变为负值,是伺服电机的速度从匀速开始逐步减速到0。
这个时候问题就出现了,虽然位移和速度都是逐步变化,没有跳变,但是对于加速度来说,则是一个跳变的过程。因为从零位开始,加速度是从0 直接跳变到一个恒定值,中间没有递变过程;然后在要达到匀速运动的时候,又是一个加速度跳变,从恒定值直接跳变回0;在匀减速运动开始的时候,又从0 直接跳变成一个负值;最后在运动结束的时候,再次从负值直接跳变成0。
这样问题就出来了:对于伺服系统来说,加速度对应伺服电机的扭矩,加速度的变化对应的实际上就是电机扭矩的变化。如果伺服系统的加速度跳变的话,对应的伺服电机的扭矩就会跳变。上图显示的一个完整的运动过程中,一共有4 次加速度跳变,所以对于伺服电机来说,一个运动周期就会有4 次扭矩跳变。虽然扭矩的变化对于伺服电机来说比较正常,但是如果伺服系统带的负载是一个比较大的设备,扭矩输出很大;或者负载端是比较精密的设备,不允许有任何跳变引起的振动;又或者产品刚性比较差,不允许有扭矩的突变的话,这个时候,问题就比较麻烦了。
这样回到最初的问题,因为现在的伺服系统基本都是采用这种运动方式来走定位,如果不能采用梯形位置块模式,那还能采用什么模式呢?
通过查阅相关资料,加上一些研究,发现有一种类型的曲线,可以不受加速度跳变的限制,并且可以自由设定加速度值,甚至可以设定加速度的加速度,即加加速度。这种曲线就是5 次方曲线。
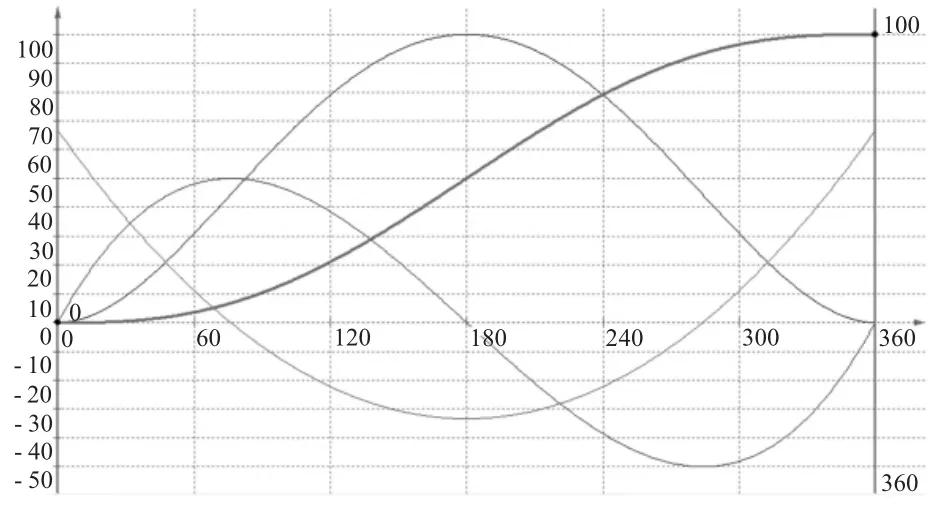
图4 5 次方曲线图
图4 显示的是一条标准的5 次方曲线,红色的是位移曲线,蓝色的是速度曲线,绿色的是加速度曲线,紫色的是加加速度曲线。可以发现,和普通曲线相比,多了一条加加速度曲线,也正式因为有了这条加加速度曲线,加速度曲线才能不用跳变。
如果将5 次方曲线应用在之前的梯形位移曲线上,效果会如何?

图5 应用5 次方曲线后的梯形位置块
可以很明显的发现,在应用了5 次方曲线之后,速度曲线、加速度曲线,都比之前的曲线更平滑柔顺,没有任何的阶跃和跳变了。速度曲线和之前一样,是从0 开始增加,一直增加到匀速段,之后匀速运行到减速段,在逐步减速到0。
而加速度曲线则和之前的完全不同:之前的曲线,加速度是从0 直接跳变的,之后保持恒定值,直到匀速段后再突然跳变回0。而现在5 次方曲线中,加速度是从0 开始有弧度的增加,在达到拐点后再有弧度的减少,当曲线要达到匀速运行段的时候,加速度正好回复到0。这中间没有一点阶跃或者跳变,都是平滑的运动。减速段也是一样,平滑地减速到0。
所以在用了5 次方曲线之后,就不用担心因为扭矩阶跃跳变而引起的负载突然变化,精度变差甚至损坏产品的问题发生了。
那么5 次方曲线到底是个什么曲线?为什么叫做5 次方曲线?曲线的方程式是什么?它又是如何影响曲线的速度,加速度和加加速度的呢?
5 次方曲线之所以叫做5 次方曲线,是因为在其位移方程式中,对于自变量X 最高有5 次方指数来影响方程式结果的。5 次方的方程式具体结构如下:

式中A、B、C、D、E 都是系数,而X 代表的是时间,或者是主轴的位置;而Y 代表的是从轴(或者说是该伺服电机本身)的位置。
5 次方曲线按照上面方程式求出来的结果是位置值,也就是位移曲线;如果要求速度曲线,就必须将该方程式求导,也就是将位移对时间求导,得出速度曲线。所以5 次方曲线的速度曲线方程式是:

同样的,加速度曲线的方程就是对速度曲线方程再求一次导:

而加加速度的方程就是对加速度方程求导:

现在方程式有了,但是方程式的系数ABCDE 都没有确定,还是无法求出具体数值的。所以需要将特殊的点带入方程式中,来求出系数ABCDE。
通常选取的特殊点是曲线的起始点和终点。比如起始点的起始位置是0,对应的从轴位置也是0,起始速度是0,加速度是0,则对应的求解方程就有:

根据这3个方程式,可以得出D 和E 的值是0。
但是知道这2个系数还不够,还需要知道ABC的值才能最终确定方程式。所以我们需要终点的数据:终点X 位置值1(100%),从轴位置1(100%),速度为0,加速度0。

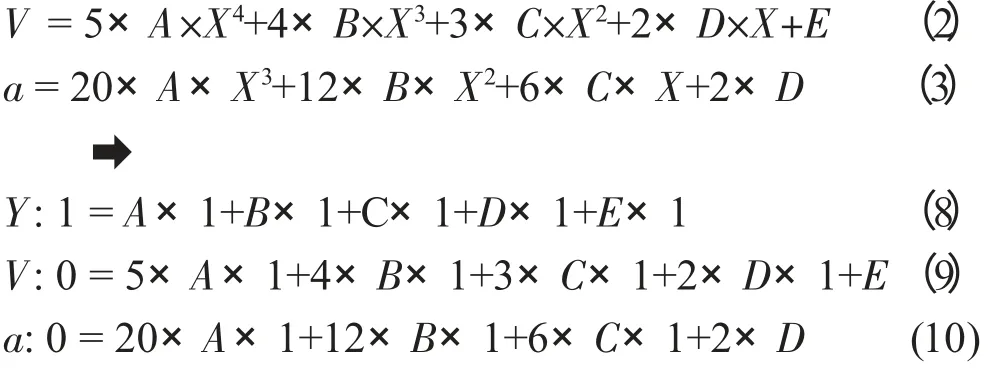
同时带入之前求得的D 和E,求出ABC 的值分别为:
A =6,B=-15,C=10。
所以按照之前给的设定条件,初始点和终点的具体值:
初始点:主轴位 置0,从轴位置0,起始速度0,起始加速度0;
终点:主轴位置1,从轴位置1,终点速度0,终点加速度0;
得到的5 次方曲线为:
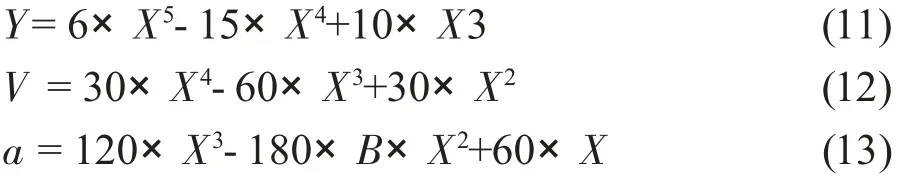
这个就是条标准5 次方曲线的方程了,如果按照方程式画出曲线来的样子就如下:

图6 5 次方曲线位置,速度,加速度和加加速度图
但是有一点要确定的是,每条5 次方曲线都会因为初始条件的不同(起始点和终点的位置,速度,加速度),而是每条曲线的ABCDE 都不一样。所以,只要前提条件变化了,就必须重新计算方程式,不然曲线就不是一样平滑的5 次方曲线了。
猜你喜欢
微特电机(2020年11期)2020-12-30 19:42:32
小资CHIC!ELEGANCE(2019年40期)2019-12-10 09:12:42
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
小小艺术家(2017年8期)2018-01-26 13:15:10
Coco薇(2016年7期)2016-06-28 02:09:09
工业设计(2016年6期)2016-04-17 06:42:53
作文·初中版(2015年10期)2015-10-26 16:37:53
机械制造与自动化(2014年1期)2014-03-01 04:21:41
文苑·感悟(2013年9期)2013-04-29 13:03:31
