基于3D摄影测量盾尾质量检测技术
2012-08-28 08:39:40李凤远韩伟锋
隧道建设(中英文) 2012年6期
李凤远,韩伟锋,陈 桥
(1.盾构及掘进技术国家重点实验室,郑州 450001;2.中铁隧道集团有限公司,河南 洛阳 471009)
0 引言
随着城市地铁隧道、水工隧道、越江隧道、地下管线隧道的增多,盾构法作为隧道建设中最为重要的一种工法,已被广泛应用。由于在盾构施工过程中内部压力比较大,为防止盾尾漏浆,盾尾的密封要求比较严格。盾尾密封最为重要的一个要求就是盾尾的圆度,如果偏差太大就容易漏浆[1-4]。目前国内配套设备和关键件的设计、生产技术水平低,故生产出的盾尾,特别是旧盾尾再次使用前需要对其圆度进行严格的检测。
传统的盾尾检测方法是先人工拉线找中心,然后使用卷尺或全站仪检测。新制造的盾尾可以使用走刀检测、大型龙门三坐标测量仪、柔性关节臂测量仪及激光跟踪仪等。但各设备在大型工件测量领域有明显的不足,而且大型龙门三坐标测量仪、柔性关节臂测量仪和激光跟踪仪等设备都需进口,价格昂贵,成本很高,测量需要花费一天或几天的时间,从技术和实用角度考虑,不便实现大型工件的测量。
3D摄影测量是利用光学成像原理,采用非接触式测量,采集到物体表面点的空间位置形成点云[5-7],然后利用Qualify软件将点云与设计数模进行比对[8-9]。通过点云和标准数模进行比对,利用计算机计算出各点偏差值。3D摄影测量技术测量环境和测量范围不受限制、操作简单方便、测量精度高,无需搬运工件,也不需要对设备进行繁琐的位置调整和精度校正等操作,对于测量大型叶片、大型模具、大模型等约1 h就能完成,可以说是一个便携式快速光学“三坐标测量仪”。3D摄影测量技术在钢铁、汽车、模具、风电等行业已经得到广泛应用。
1 测量设备
3D摄影测量系统又称照相测量定位系统或近景摄影测量系统,是利用照相机技术来获取某些特征标志点的三坐标位置进行的三维测量方法。利用Digimetric计算出贴在物体表面参考点的三维坐标值,形成一个固定的坐标系统,再根据坐标变换使测量的三维坐标点对齐到大型工件的CAD数模上,进行对比后得到对比结果。3D摄影测量设备见图1。
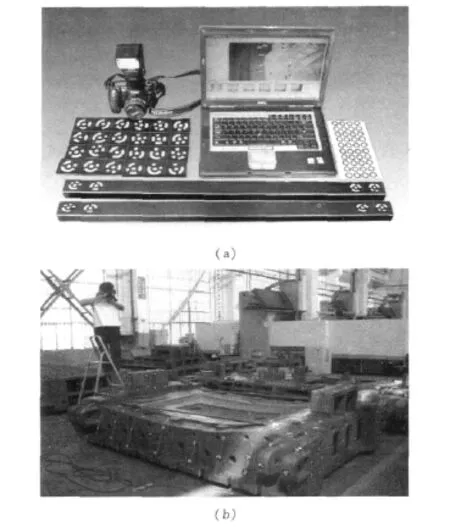
图1 3D摄影测量设备Fig.1 3D photogrammetry devices
2 测量原理
摄影测量是利用光学成像原理采集物体表面点空间位置坐标,但图像本身没有空间具体位置的概念,且不同的点在不同的照片上空间的位置坐标是不一样的,需要有编码点作为不同照片之间的连接桥梁。每个编码点都有唯一的编号且已经在相机中标定,而任何一个标志点相对于编码点的空间位置都是唯一的,故通过编码点可以把不同照片采集到的同一个标志点识别为同一点,并且为每一个标志点自动生成唯一代号。直接生成的空间点云不带实际尺寸概念,在检测前需要放置一般比例尺,比例尺上贴有编码点,编码点之间的距离为标准距离,并且已经在相机中标定。在计算过程中,系统会参照该比例尺对所有的编码点进行距离计算。利用标志点取点,编码点作为不同照片关联的桥梁,带编码点的标尺作为比例尺,系统生成的点云即是带尺寸位置的空间点云。通过把点云与标准数模进行比对可分析出盾尾各处的具体偏差值。各种定位工具如图2所示。
3 贴编码点与标志点
粘贴编码点和标志点的数量适中即可,如果编码点和标点数量太多会增加计算机运算时间,如果点数太少容易影响测量精度。通过实际测量经验,6 m左右的大型构件标志点的间距保持在约6 cm即可,编码点的数量能保证2张照片有8个以上的重合点即可。
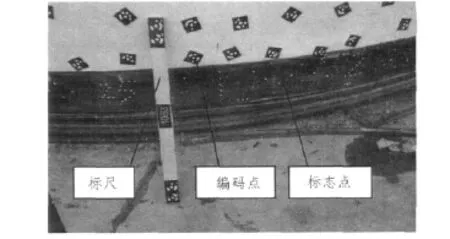
图2 定位工具Fig.2 Positioning tools
盾尾检测不但需要检测出最大偏差值,而且还需要确定具体是哪个位置为最大偏差点。由于盾尾是一个圆形构件,基本没有比较好辨认的几何特征,需要利用标志点在盾尾一周间隔一定角度贴出不同数字,以方便确定具体位置的偏差值。进行偏差比对时需将标准数模和点云对齐,由于盾尾为圆型构件,对齐特征需要端面和轴心,端面需要找出一个相对垂直于柱面的平面贴点,利用该平面上的点拟合出基准平面特征,利用圆柱面的点拟合出轴心。盾尾带数字形状编码点和标志点如图3所示。
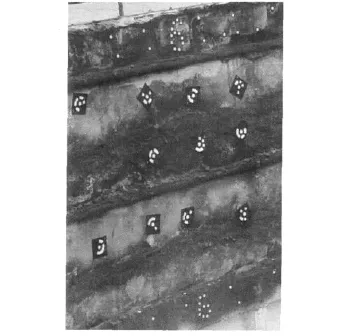
图3 编码点与标志点粘贴示意图Fig.3 Coded points and marking points
4 采集点云与创建标准数模
完成了标志点、编码点和标尺的定位后须进行图像拍摄。为保证能够有效地采集到标志点,每2张照片重合的编码点应当大于8个,在拍摄过程中,保持相机距离标志点约2 m,并且在采集过程中所有的点与标尺不能够移动。如果有点或者标尺移动须重新采集,否则会出现相对位置错乱,从而造成检测失败。标志点采集位置如图4所示。
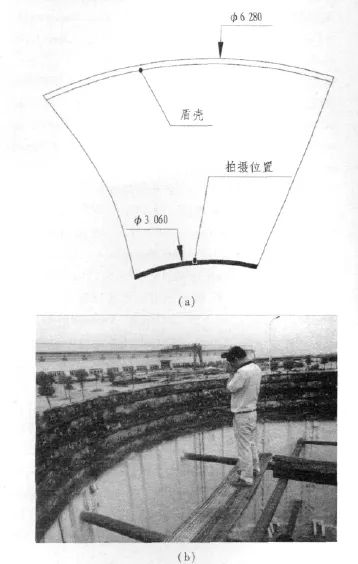
图4 标志点采集位置示意图(单位:mm)Fig.4 Positions of marking points(mm)
摄影测量系统是利用光学成像原理采集标志点的圆心。由于设备上会有各种污渍,系统会把部分白色的污渍错误地识别为标志点,对系统分析形成干扰,在进行偏差比对前须清除所有采集到的干扰点,否则系统会把干扰点与标准数模进行比较,造成检测错误。处理后的标志点云如图5所示。
图5 标志点云Fig.5 Cloud of marking points
标准数模并不是传统意义上的三维模型,质量比对的数模只需建立检测面模型即可,并且应尽量简化数模,否则会增加计算量。检测盾尾圆度关键是检测盾尾刷固定环的圆度,数模可以只包含盾尾刷固定环内圆柱面。
5 应用实例
某项目盾尾为二次使用,直径6 280 mm,按照检测要求使用摄影测量方法检测盾尾刷固定环圆度。在被测盾尾上标志出对齐基准点,在需要测量处贴好标志点,并布置编码点和标尺,使用标定后的数字相机,从不同角度进行拍摄,将拍摄所得图像导入到计算机;使用Digimetric测量系统软件对图像自动进行处理,去除明显干扰点,形成有效三维坐标点云,使用专业质量比对软件将点云拟合出中心轴与端面,导入标准数模,同理拟合出中心轴和端面;将点云中心轴和端面与标准数模中心轴和端面对齐,则建立了质量比对系统的相对坐标系。盾尾标准数模和点云如图6所示。

图6 盾尾标准数模和点云Fig.6 Standard numerical model and point cloud of shield tail
采用专业质量比对软件对测量点云和标准数模进行坐标比对,得出该项目盾尾检测部位位置尺寸质量偏差。图7为各标志点偏差云图。从图7中可以看出,该盾尾最大变形处位于 4号位置,偏差值为42.467 mm。图8为各阶段偏差所占的点比例。从图8中可以看出,该盾尾有44.508%的点的偏差值为-5.530~5.530 mm,共有3.852%的点偏差大于36.31 mm。
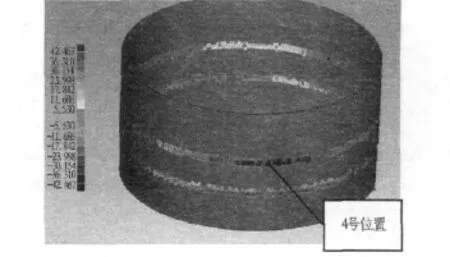
图7 各标志点偏差云图(单位:mm)Fig.7 Deviation cloud of marking points(mm)

图8 各段偏差值所占标志点比例Fig.8 Percentage of deviation points in total marking points
6 结论与讨论
1)使用摄影测量对盾尾圆度检测,可以准确地判定出盾尾各处最大偏差值,进而对盾尾偏差较大的位置进行修复或者为安全起见重新制造盾尾,保证盾构施工安全。
2)采用3D摄影方法可为超过6 m直径的盾尾进行测量,为盾构工厂制造质量检测、用户验收质量比对、现场组装测量等提供了一种新方法。
3)检测系统本身检测精度能达到0.10 mm/4 000 mm,但由于检测方法、检测人员水平和检测方案的限制,最终检测精度还不是很高(约1 mm),对于检测方案还有待于进一步研究。
[1] 张迪.水底大型泥水盾构盾尾密封失效的应对技术[J].铁道建筑技术,2011(5):1-6.(ZHANG Di.Countermeasures for failure of tail sealing of large underwater slurry shield[J].Railway Construction Technology,2011(5):1-6.(in Chinese))
[2] 李胜新,刘广仁,张平.盾构法隧道掘进中盾尾密封涌水涌砂防治技术[J].石油工程建设,2009(2):79-80,6.(LI Shengxin,LIU Guangren,ZHANG Ping.Prevention and control of water and sand gushing at shield tail seal during shield tunneling[J].Petroleum Engineering Construction,2009(2):79-80,6.(in Chinese))
[3] 刘军,张弥.盾构开挖盾尾空隙引起的地层移动[J].铁道工程学报,1987(2):203-208.
[4] 朱祖熹.盾构法隧道的盾尾防水密封与盾尾密封油脂[J].中国建筑防水,2009(7):2-6.(ZHU Zuxi.Waterproofing and sealing of shield tail and sealing grease[J].China Building Waterproofing,2009(7):2-6.(in Chinese))
[5] 张建霞,王留召,蒋金豹.基于数字影像的低空摄影测量研究[J].测绘通报,2006(12):29-31.(ZHANG Jianxia,WANG Liuzhao,JIANG Jinbao.Low-altitude aerial survey research based on digital image[J].Bulletin of Surveying and Mapping,2006(12):29-31.(in Chinese))
[6] 沈小乐.数字摄影测量产品的几何精度分析[J].湖北民族学院学报:自然科学版,2007(1):46-51.(SHEN Xiaole.Analysis of geometric accuracy on digital photography product[J].Journal of Hubei Institute for Nationalities:Natural Science Edition,2007(1):46-51.(in Chinese))
[7] 张玉双,于湜,王子茹.摄影测量的发展与应用[J].包钢科技,2000(4):94-96.(ZHANG Yushuang,YU Shi,WANG Ziru.Development and application of photogrammetry[J].Science& Technology of Baotou Steel(Group)Corporation,2000(4):94-96.(in Chinese))
[8] 陈博,李香梅.基于CATIA V5和Geomagic Qualify的汽车零部件质量快速检测[J].北京汽车,2011(5):40-43.
[9] 邹付群,成思源,李苏洋,等.基于Geomagic Qualify软件的冲压件回弹检测[J].机械设计与研究,2010(2):79-81.(ZOU Fuqun,CHENG Siyuan,LI Suyang,et al.Springback inspection for punching parts based on geomagic qualify[J].Machine Design & Research,2010(2):79-81.(in Chinese ))
猜你喜欢
计算机测量与控制(2024年2期)2024-02-29 04:22:22
电子设计工程(2022年20期)2022-10-28 13:42:54
汽车实用技术(2019年20期)2019-11-06 07:18:24
机械管理开发(2018年11期)2018-11-28 08:40:52
测控技术(2018年12期)2018-11-25 09:37:20
传感器与微系统(2018年7期)2018-08-29 00:44:24
中国房地产业(2016年9期)2016-03-01 01:26:36
工程建设与设计(2016年4期)2016-02-27 10:51:09
计算机工程与设计(2014年9期)2014-12-23 01:16:00
中国质量与标准导报(2014年7期)2014-02-28 22:24:36