
永磁同步电机转子初始位置的自动标定*
2012-08-28 06:50曹艳玲文彦东
电机与控制应用 2012年8期
曹艳玲, 文彦东
(1.长春工程学院,吉林长春 130012;
2.中国第一汽车集团技术中心,吉林长春 130011)
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有系统效率高、功率密度大等一系列优点,因而被广泛使用。要实现PMSM的精确控制需要知道任意时刻电机转子的位置。因此,在电机工作前首先要对电机转子的初始位置进行标定。标定方法有两类,即无位置传感器估算法和有位置传感器测量法。无位置传感器估算法是通过逆变器要么施加交流电流,要么施加幅值较小的空间矢量电压,对电机转子位置估算。但这种方法计算复杂,而且对电机本体参数有很大的依赖性,因此在实际操作中很难保证高精度的测量,这会使得在电机控制中产生不期望的电流分量,尤其是在大电流幅值下,电流分量不可忽略,最终导致转矩控制精度下降或者系统效率降低。有位置传感器测量法是通过旋转变压器(简称旋变)获得转子的绝对位置。旋变具有良好的抗震性、抗干扰性及可靠性,因而在混合动力和纯电动车用驱动电机上有着广泛应用。目前,此种标定方法是经外部电源供电,利用电机逆变器对电机定子绕组施加空间电压矢量U100,使电机转子定位在A相,通过读取旋变输出信号得到电机转子的初始位置,这种测定方法精度高,可实现PMSM的精确控制,但它需要采用逆变器及外部高压供电,为便于现场调试。本文提出了一种检测PMSM转子初始位置的自动标定系统,无需上述方法提到的逆变器和外部高压供电电源,只需将电机的两个相线和旋变传感器信号连接到标定系统中,即可快速、准确地完成转子初始位置的自动测量。
1 转子初始位置计算原理
旋变由定子和转子构成,在安装旋变时,将其定子和转子分别与电机的定子和转子安装在一起。当电机旋转时,旋变的转子与电机转子同步旋转。旋变转子的位置信息可以通过旋变解码电路获得,而电机转子的位置可通过电机反电势得到。通常情况下,旋变转子的零位与电机转子的零位不同,二者相差一个固定角度,该角度可以通过反电势观测法测量。
在电机不施加外部三相电压的情况下,平滑匀速地旋转PMSM转轴,便会在定子侧感生出正弦感应电动势,其频率及幅值与转子旋转速率成正比。用T表示电机线电压UAB的周期,用t表示线电压过零点至Z脉冲的时间间隔(如图1所示),则电机转子零位与旋变转子零位的角度差为

式中:π/6为线电压超前于相电压的角度。
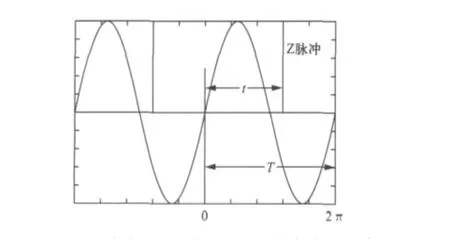
图1 线电压UAB与旋变Z脉冲波形示意图
2 系统设计
图2为PMSM转子初始位置标定系统原理框图。该系统以英飞凌16位单片机XC2785为处理和运算核心,辅以反电势采集电路、旋变信号解码电路及CAN通信电路构成。反电势采集电路用以将正弦反电势信号转化为方波信号;旋变信号解码电路用以读取旋变Z脉冲信号;XC2785单片机用以计算反电势周期T和过零时间间隔t,并由此得出位置角度差。由于CAN总线抗干扰能力强、传输距离远,非常适合现场应用,此系统选用CAN总线将角度差信号发送到上位机或者其他节点,从而对电机转子初始位置数据进行采集和管理。
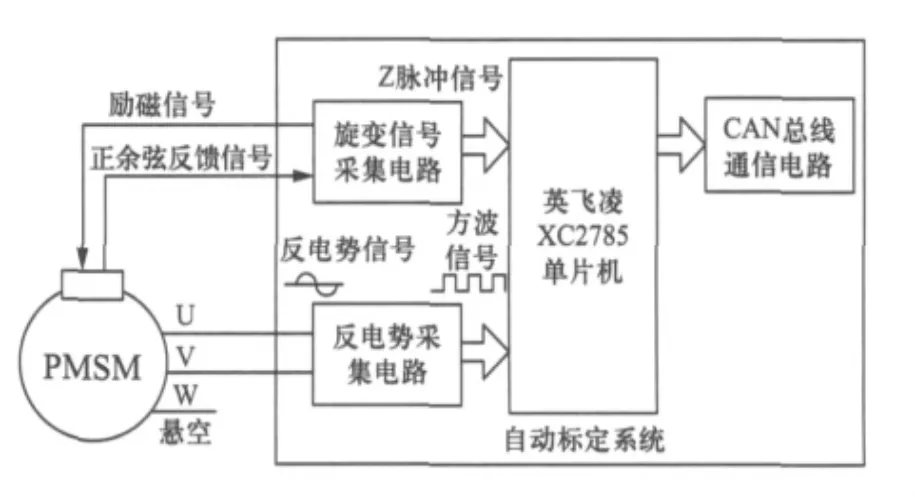
图2 系统原理框图
2.1 硬件设计
2.1.1 反电势采集电路设计
反电势采集电路利用AD629对反电势信号进行电压隔离和放大,采用AD790做成比较器电路,将反电势信号转化为方波信号,如图3所示。AD629采用±12 V双电源供电,供电电源选用0.1 μF和 10 μF 的电容滤波,以保证输出稳定。电机反电势首先经电阻R1和R2分压,再将电阻R2得到的电压连接到AD629的正、负输入引脚,并通过二极管对AD629的输出进行电压钳位,以保证输出电压不会超过单片机AD引脚能够承受的最大电压;AD790是一款快速、精密的电压比较器,采用双电源供电,其负输入端接地,正输入端连接反电势信号。AD790将AD629的输出电压经电平比较后转化为方波信号输送到单片机。
2.1.2 旋变解码电路设计

旋变位置解码电路如图4所示,采用的是AD2S90和 AD2S99转换芯片,二者配合使用。AD2S90是解码电路的核心,内部功能模块主要包括相敏检测器、乘法器、压控振荡器、增减计数器,形成一个闭环反馈系统。AD2S90位置信号以A-B-NM形式输出,NM(North Marker)代表旋变转子位置过零,旋变信号过零一次就会产生一个Z脉冲信号,将该信息输入到单片机即可进行角度差的计算。AD2S99为AD2S90提供同步基准电压信号,同时还给旋变提供高品质的正弦波励磁信号,共有4种信号频率可供选择,即2 kHz、5 kHz、10 kHz和20 kHz,以满足不同旋变传感器的要求。另外,由于AD2S99的输出能力有限,为了增加系统的驱动能力和抗干扰能力,在AD2S99励磁信号输出端增加运放以满足旋变对输入励磁信号驱动能力的要求。
2.2 控制器软件设计
系统软件设计主要包括反电势方波信号读取、Z脉冲读取、CAN通信及电机转子初始位置计算四部分。反电势和Z脉冲信号均被连接到单片机电平变化中断引脚上,图5为电机转子初始位置计算时序图。由于在一个反电势周期中必然会出现一个Z脉冲,所以在反电势方波电平上升沿中断中起动定时器,在Z脉冲上升沿中断中直接读取定时器的数值,此数值即为线电压过零点至Z脉冲的时间间隔t,而在下一次方波上升沿中断中再次读取定时器的数值,即为反电势的周期T。对定时器清零,重新起动定时器,以实现多次重复测量,利用公式(1)可计算出电机转子零位与旋变转子零位的角度差θ。
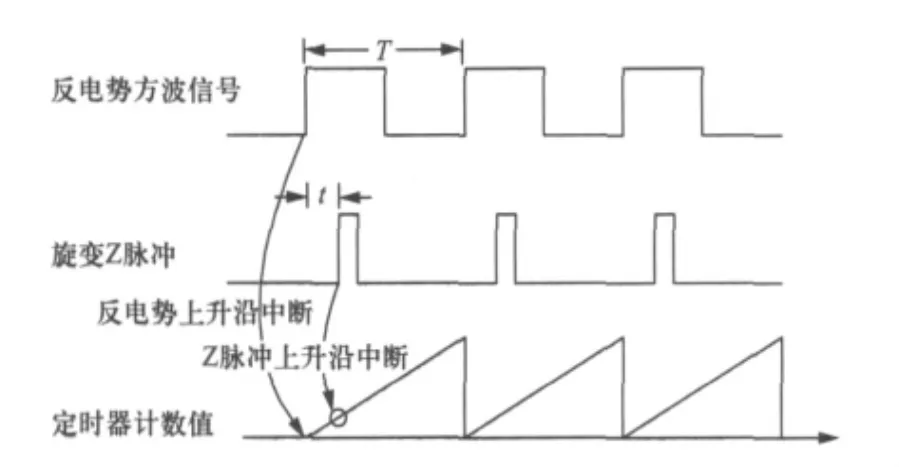
图5 电机转子初始位置计算时序图
3 试验结果
试验中旋变采用的是多摩川公司的TS2225N14E102。此旋变要求励磁输入为AC7Vrms-10 kHz,输入阻抗为 120 Ω ±20%,输出阻抗为340 Ω。电机为内嵌式 PMSM,基速为2 000 r/min,峰值扭矩为300 N·m,峰值功率为40 kW,永磁磁链为0.070 7 Wb。取电机输出轴顺时针旋转方向为正方向,将电机A、B相线连接到反电势采集电路的正、负输入端,将电机的旋变传感器信号线连接到旋变位置解码电路。单片机输出显示反电势信号周期T为167.184 ms,反电势过零点至 Z脉冲信号的时间间隔t为103.248 ms,电机转子零位与旋变转子零位的角度差θ是252.32°。为了对试验结果进行验证,将电机反电势信号和旋变解码电路输出的Z脉冲信号输入到示波器,得到的波形图如图6和图7所示。从这两个图可以看出,通过示波器测得的T和t分别为167 ms和103 ms,导致这两个测量结果存在差异的主要原因是单片机定时器的分辨率非常高,仅为4 μs,并且从单片机得到的试验结果为多次测量的平均值。
4 结语

本文主要研究了PMSM转子初始位置的自动标定与控制技术,设计了应用差分放大器对电机转子位置信号进行采集,利用单片机对电机转子初始位置数据进行处理和运算。试验验证了该测量方法可有效标定PMSM转子初始位置,具有精度高、速度快和自动化等优点,并且该工具传输距离远、抗干扰能力强,可节约时间和成本。
[1]GULEZ K,ADAM A A,PASTACI H.Torque ripple and EMI noise minimization in PMSM using active filter topology and field-oriented control[J].IEEE Transactions on Industrial Electronics,2008,55(1):251-257.
[2]OCEN D,ROMERAL L,ORTEGA J A,et al.Discrete space vector modulation applied on a PMSM motor[J].12th International Power Electronics and Motion Control Conference,2006:320-325.
[3]JIN N Z,WANG X D,GAO H Y,et al.Sliding mode based speed regulating of PMSM MTPA control system for electrical vehicles[C]∥ International Conference on Electronic and Mechanical Engineering and Information Technology,2011:987-992.
[4]KAEWJINDA W,KONGHIRUN M.Vector control drive of permanent magnet synchronous motor using resolver sensor[J].ECTI Transactions on Electrical ENG,Electronics,and Communications,2007(5):134-138.
[5]JUNG D S,SONG J H,LEE U H,et al.Improving design of HEV traction motor for high power density[C]∥ IEEE International Conference on Power Electronics and ECCE Asia,2011:2677-2680.
[6]TARIP A R,NINO-BARON C E,STRANGAS E G.Design and analysis of PMSMs for HEVs based upon average driving cycle efficiency[C]∥ IEEE International Electric Machines& Drives Conference,2011:218-223.
[7]李豹,左月飞.永磁同步电机转子位置求取方法[J].电机与控制应用,2011,38(4):34-36.
[8]鲁文其,胡育文,黄文新,等.无刷直流电机无位置传感器转子位置自检测复合方法[J].电工技术学报,2008,23(9):70-75.
[9]周扬忠,胡育文,黄文新.直接转矩控制电励磁同步电机初始转子位置估计[J].电工技术学报,2007,22(12):55-60.
[10]薛山,温旭辉,徐志捷.基于AD2S90的数字旋转变压器[J].电工技术杂志,2003(9):102-104.
[11]史久根.CAN现场总线系统设计技术[M].北京:国防工业出版社,2004.
猜你喜欢
中国石油石化(2022年12期)2022-07-16
防爆电机(2020年4期)2020-12-14
河北理科教学研究(2020年1期)2020-07-24
中国外汇(2019年19期)2019-11-26
客车技术与研究(2019年5期)2019-10-24
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
电子设计工程(2015年3期)2015-02-27
决策与信息(2014年21期)2014-12-13
物理与工程(2010年5期)2010-03-25
