
模糊PID控制策略在汽车助力转向系统中的应用
2012-08-26 08:05李智勇
制造业自动化 2012年18期
李智勇,戴 蓉
LI Zhi-yong1, DAI Rong2
(1. 四川工程职业技术学院 电气信息工程系,德阳 618000;2. 中国民用航空飞行学院 计算机学院,广汉 618307)
0 引言
电动助力转向系统是汽车技术发展的趋势,它具有结构简单、节能环保、安全可靠等优点,能够满足人们对汽车驾驶安全、稳定、灵活的要求。合理的控制策略是影响EPS性能的关键。传统的PID控制策略存在许多弊端,已经不能满足发展的需要,因而出现了一些先进的理论例如鲁棒控制理论、神经网络控制理论等,希望提升系统抗干扰性和稳定性等。本文采用了模糊控制理论来优化PID控制器,算法简单、性能优异,尤其适合EPS的非线性系统,意义重大。
1 EPS系统原理
电动助力转向系统(简称EPS)是一种由电动助力机直接提供转向辅助扭矩的动力系统,将挑战成为液压转向系统而成为汽车转向系统的今后发展方向。EPS系统具有装配灵活、调整简单、节能环保等优点。如图1所示,EPS主要由输入轴、电机、扭矩传感器、循环球螺杆和ECU等部分组成。
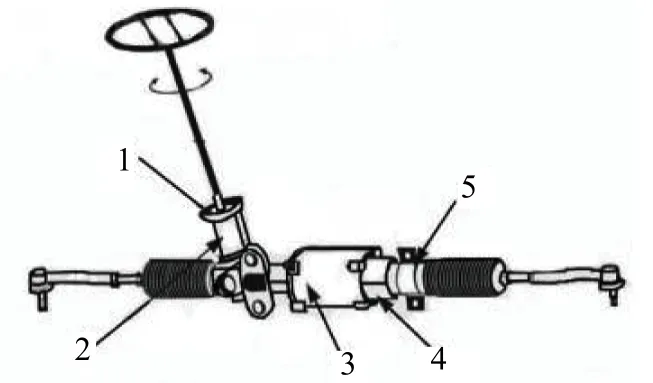
图1 EPS结构图
汽车驾驶员在转向时,转向盘的转矩大小和转向被转矩传感器所检测,电压信号再输给ECU,ECU再将检测到的各种信息发出指令给电动机控制器,使其输出合适的转向助力转矩,实现转汽车向。
EPS具有以下优势,使得它近年来获得广泛应用:
1)电机仅转向时提供助力,节省燃油。
传统的转向系统有发动机带动转向油泵,不管无论是否转向都会消耗发动机一定的动力。而EPS不转向时并不消耗能量,电机仅仅在转向时才提供助力,这样EPS就能降低燃油消耗。实验表明,不转向时可以降低燃油消耗2.5%左右,转向时,降低5.5%左右。
2)软件能够调整转向助力的大小,同时兼顾高速操纵的稳定性和低速转向的轻便性。
通过软件调整助力,低速时系统提供较大的转向助力,使得转向轻便;车速慢慢提高,系统提供的转向助力逐渐减小,转向时所需的转向力就逐渐增大,提高车辆的稳定性。
另外,EPS还施加一定的附加回正或者阻尼力矩,同时兼顾车辆在高速、低速时都具有较好的回正性能。
3)结构紧凑,质量轻巧,易于保养。
EPS省去了液压转向油泵、液压管路等部件,电机、减速机构又和转向柱、转向器形成整体,整体系统紧凑,生产装配性好,易于保养。
4)EPS可以通过程序的设置和不同的车型相匹配,缩短开发周期。
2 EPS的模糊PID控制策略
EPS的控制需要解决确定电机目标电流和对目标电流进行跟踪两大问题。
2.1 确定目标电流
目标电流由助力特性曲线确定,相同力矩下,目标电流按照车速的递增而下降,助力随电流的增大而加大,本文选择线性助力特性曲线,通过查询表格确定目标电流,具有轻便的特性。从图2中可以看出,转向盘输入力矩用Td表示,助力转矩用Ta,最大助力时的转向盘力矩表示为Tdmax,线性助力特性数据量小、结构简单、方便存储而且容易进行调整。

图2 线性特性曲线
2.2 跟踪目标电流
EPS系统中最被广泛采用的是基于PID的控制策略,通常按照误差比例、积分、微分线性组合,进行控制。通过调节使系统输出接近目标值,实现跟踪目标转矩。但是这种方式采用精确的参数,并不能得到满意的特性。本文采用的模糊PID控制,其结构如图3在不同情况下调整kp、ki、kd参数,保持为最佳,提高动态响应速度。

图3 模糊PID控制图
2.3 模糊PID控制设计
设计控制器的关键是建立模糊规则,总结技术知识和操作经验,建立比例系数kp、积分系数ki、微分系数kd三张模糊控制表,如表1、表2、表3。将输入变量e和误差变化率ec设成{NB,NM,NS,ZO,PS,PM,PB} 7个模糊等级, kp、ki、kd= {NB,NM,NS,ZO,PS,PM,PB}。
模糊推理的规则如下:
1)误差较大时,要提高响应速度,同时为了避免系统响应出现超调,kp取大值,ki取零;误差偏小时,防止振荡、不稳定,kp减小,ki取小值;当偏差很小,为使系统快速稳定,kp继续减小。ki取稍大值或者不变。
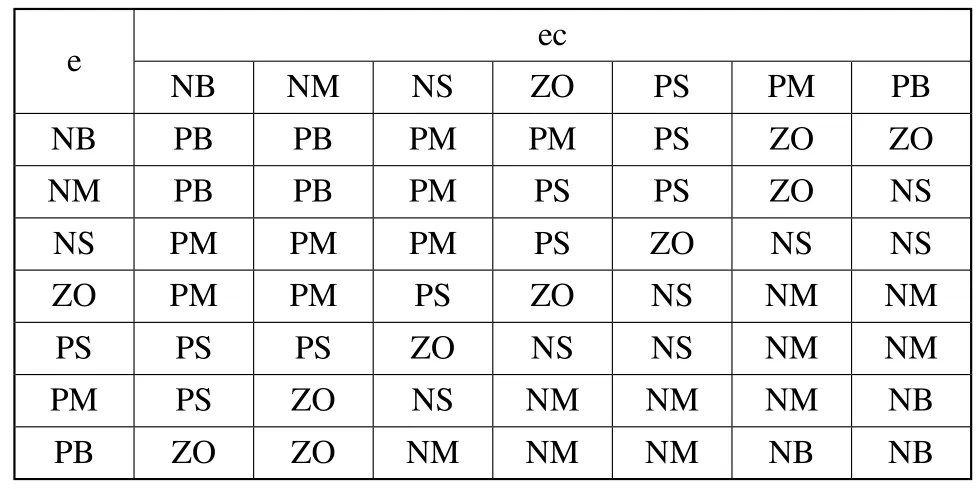
表1 kp的模糊规则表
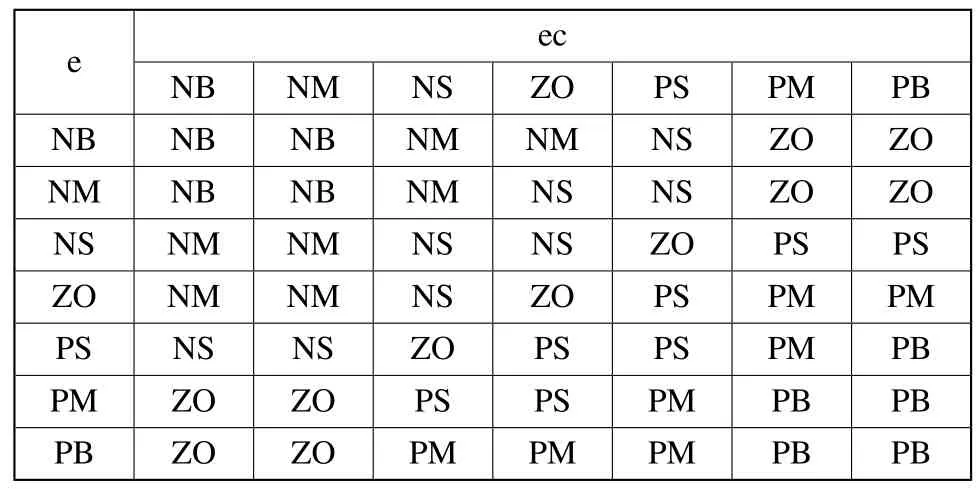
表2 ki的模糊规则表

表3 kd的模糊规则表
2)e越大,kp越小,ki越大,反之同样如此,考虑时需要结合偏差大小。
3)偏差与其变化率同号时,被控量的变化方向向着偏离既定值,kp取大值;偏差较大时,kp取小值,可以达到加快控制的动态过程的目的。
4)微分可以阻止偏差变化,改善动态特性,消除振荡,kp可以加大,减小稳态误差,使控制效果满意。e较大时,kd为0,被PI控制;e较小时,kd为正,PID控制。
3 仿真和结果
本文的仿真实验选择软件MATLAB 7.0.1。设置初始值 kp0= 10,ki0= 1000,kd0= 0.005,输出变量Dkp变化范围在[-9, 9]、Dki[-1000, 1000]、Dkd[-0.005,0.005]。
给转向盘输入阶跃信号和正弦信号作为其力矩输入信号,模拟常规和快速两种方向盘转动情况下的电磁转矩作为输出信号。输出信号和目标转矩放入模糊控制器做模糊PID调节,完成后其值看作是控制助力电压信号。本文将常规PID和模糊PID控制器进行EPS系统控制的仿真实验。图4的结果表明,模糊PID控制明显优于常规PID控制的EPS系统。模糊PID控制下快速转动方向盘时可靠性和稳定性更好,系统响应时间短、输出平稳、抗干扰,系统的助力跟踪性能良好。
4 结论
模糊PID控制策略结合了常规PID控制和模糊控制,文章首先介绍了电动助力转向的原理,然后设计模糊PID控制,确定模糊规则、调整控制参数等,说明模糊PID控制的精确控制和良好性能,EPS能轻便改善转向。通过MATLAB的仿真结果证明模糊PID控制效果优于PID控制,性能更好、更可靠。

图4 模糊PID控制仿真
[1]唐小琦, 关勇刚. 汽车电动助力转向控制系统的研究[J].华中科技大学学报, 2003, 33(7): 77-79.
[2]李国勇. 智能控制及其MATLAB实现[M]. 北京: 电子工业出版社, 2006.
[3]Jeonghoon Song, Kwangsuck Boo. Model development and control methodol ogy of a new electric power steering system [J]. Instn Mech 2004, 5(20): 320-333.
[4]施国标, 申荣卫, 林逸. 电动助力转向系统的建模与仿真[J]. 吉林大学学报, 2007, 37(1): 31-36.
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
中国特种设备安全(2022年2期)2022-07-08
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
防爆电机(2022年2期)2022-04-26
防爆电机(2021年5期)2021-11-04
消费导刊(2018年10期)2018-08-20
电机与控制学报(2018年9期)2018-05-14
山东青年(2016年12期)2017-03-02
山东工业技术(2016年15期)2016-12-01
