
城市轨道交通站台安全门系统门控制单元设计
2012-08-22 07:34:26阚庭明王富章
制造业自动化 2012年23期
阚庭明,王富章,魏 奇
(中国铁道科学研究院 电子计算技术研究所,北京 100081)
0 引言
城市轨道交通站台安全门系统是一种专用于地铁站台的防护性系统。通过安全门的控制系统与驱动机构,实现地铁列车的车门与该系统站台安全门中的活动门之间的同步操作。列车未到站时,站台安全门关闭,将候车旅客与轨道隔离开;在列车到站以后,站台安全门的活动门与列车车门同步打开,乘客可以通过活动门直接出入列车车厢,为候车旅客提供了绝对的安全保障。站台安全门控制系统用于实现对城市轨道交通站台安全门设备的精确控制,是一个复杂的分布参数控制系统,该系统集建筑、机械、电子和控制等科学于一体,对信息传递速率、同步性、系统可靠性和电磁兼容性等方面的要求十分严格。控制系统中,最核心的部件是门控制单元(Door Control Unit, DCU)。
1 站台安全门控制系统结构
站台安全门控制系统主要由中央接口盘PSC、就地控制盘PSL、门控单元DCU、通讯介质及通讯接口等设备组成。其中:
1)中央控制盘(PSC)是整个安全门控制系统的核心,收集并处理来自各个监控点的控制/状态/事件信息,并将处理后的控制/状态/ 事件信息传向各个监控点。
2)就地控制盒(PSL)是列车驾驶员与安全门系统交互的设备,用于在非正常状态下(比如信号系统故障) 或紧急状态下由列车驾驶员实现对安全门的操作。
3)门控制单元(DCU)是现场控制单元,执行来自PSC 的控制命令,收集来自现场及自身的状态信息,并将此信息传向PSC。
4)控制系统将系统的控制及监视集中进行处理,系统中重要的控制命令及状态信号通过硬线进行连接,系统中其他的事件及状态信息则通过通讯网络进行传递。
2 DCU控制原理
DCU对电机的控制方式为电流转速双闭环直流调速。DCU输入端为30V,DC,内部采用一个桥式电路进行PWM斩波输出所需要的直流控制电压。
1)传动系统描述
门机传动系统为典型双闭环直流调速系统。主要由:
(1)主回路系统:由整流器UR,逆变器UPEM,电动机组成。先由整流器 将交流电整流为直流,再由逆变器将直流电压施加到电机上;
(2)电流闭环控制、PWM信号生成、IGBT门级触发系统:由电流调节器ACR、UPW、GD、电流反馈环节TA及其电平转换电路组成。主要作用是对电机电流进行闭环调节,产生PWM脉冲及最后IGBT触发;
(3)速度控制系统:由速度调节器ASR、速度反馈编码器TG及其电平转换电路组成。主要作用是对电机速度进行闭环控制。
2)主回路描述
直流电机驱动主电路由IGBT VT1~4及其续流二极管VD1~4组成。VT1~2和VT3~4交替导通,在电机电枢上产生电压。当平均值为正,电机正向运行;平均值为负,则反向运行;平均值为零,电机停止。
3 DCU功能设计
1)接口单元
对信号系统通过PSC传来的指令信号和门体安全开关信号进行处理,提供给逻辑单元及驱动单元。
2)逻辑单元
由功能强大的微处理器及安全相关器件组合构成,一旦接收到由PSC或按钮开关传来的指令,结合对安全开关状态的探测,逻辑单元便激活驱动器,并解脱锁定装置,开始运行开,关门循环。具体包括:
(1)此单元监测电机转速,用于障碍物探测及处理保护。
(2)判断门体位置,从而在非正常情况,按预定的方式控制门体运动。
(3)存储,形成历史和故障记录。
(4)可通过PTE接口(RS232)改变运行参数和下载新的软件。
(5) 可 通 过Profi bus总线接口,与PSC构成现场总线网络,向PSC发送安全门各类信息,实行监控。
(6)速度控制参数存储在逻辑单元中,故可存储产生大量所需的速度运行曲线。(其他参数如门体夹紧力阀值,重关门间隔时间,延迟时间,重关门次数)形成速度曲线的关键参数是开/关门速度设定,开/关门加、减速度斜率设定,低速关门值设定等。这样设定理论上可以形成无数条曲线(远超过60条)。由于对关键技术指标,如开/关门时间,开关门启动时间差,需在现场对不同的门进行细调,因而这样的方式更利于调试;对存储在不同存储器单元中的下列参数可调为门体加紧阀值:133N;重关门延迟时间0~10s;障碍物探测间隔时间0~2s;重关门次数1~5次。
3)驱动单元
由功能强大的微处理器,安全相关器件组合,以及PWM(脉宽调制)功率开关放大器组成。它主要负责直流电机的控制,包括PWM控制、速度环、电流限制、PI调节器,基于码盘的行程控制和分析电机电流及温度的测量。实现按电流阀值进行障碍物探测及处理功能:电机电流和速度限幅值,过流,过温保护。电机及门体开关的控制原理如图1所示。
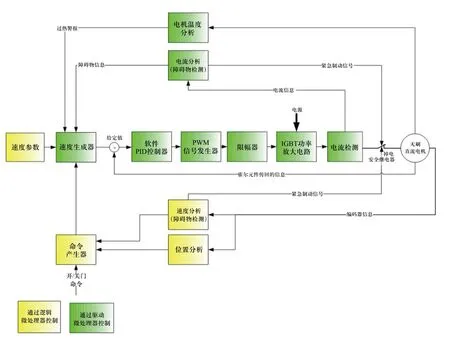
图1 DCU电机控制原理框图
4 DCU的优化设计
1)冗余功能
在驱动单元和逻辑单元中均使用微处理器以保证功能冗余安全性,它们不仅通过串行口相联,还通过硬线相联。其测量参数相互比较、处理保证所有与安全相关的功能都通过冗余的方式处理,如图2所示。
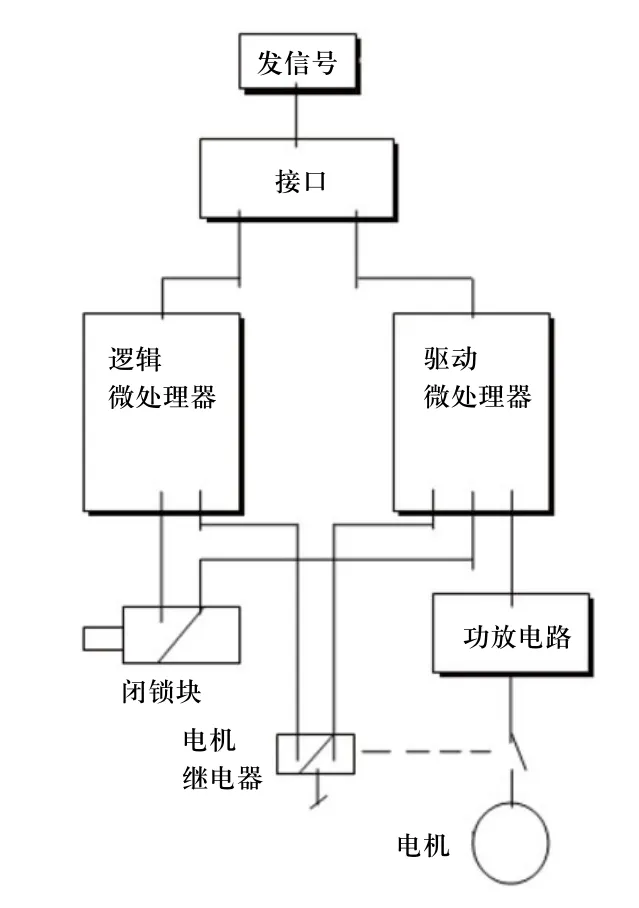
图2 冗余功能构成示意图
电机上的断电安全继电器作为电机安全的释放开关。DCU始终监视着继电器的状态。继电器由两个微处理器冗余控制。通过逻辑单元或驱动单元的处理,系统可防止电机由于错误的“开门命令”被通电。
与电机安全继电器功能一样,解锁信号也由两个微处理器冗余控制。通过执行触点,监视继电器的状态。
为了保证满足安全等级要求,电机的超速保护也用冗余方式处理。
2)障碍物探测
在开/关门过程中一旦出现障碍物,门控单元(DCU)的两个处理器可以从电机速度降低和电流增大的现象中探测出异常,而无需触点和专门的传感器,保证充分的冗余度。
DCU控制门速度克服门运动阻力。如果门的运行速度与速度图相差较大,DCU将根据门的速度计算出符合速度图的值。如果门的速度低于设置的障碍物速度或检测后速度急剧下降,DCU就会认为原因不是运动阻力造成。DCU将会启动反向制动以停止PSD运动。关门过程中遇到障碍物时,关门力立即释放,滑动门门扇各自动反方向运动50mm,延迟2s(0~10s内可调)再重关门,重复关门三次,门仍不能关闭,滑动门全开并报警待处理。
开门过程中遇到障碍物时,开门力立即释放,滑动门门扇各自动反方向运动50mm,延迟2s(0~10s内可调)再重开门,重复开门三次,门仍不能开,滑动门全关并报警待处理。
1) 逻辑单元监测速度
如果速度低于预定的值,则微处理器认定为存在障碍物,并立即向驱动单元发出停止指令,若驱动单元没有返回正确的应答,安全继电器使电机失电。
2) 驱动单元监测电流
如果电机电流高于预定数值,则微处理器认定为存在障碍物,并立即发出停止指令,若电流未见减小,同一安全继电器使电机失电。二者互为冗余。若二者同时发生,电机立即停止。
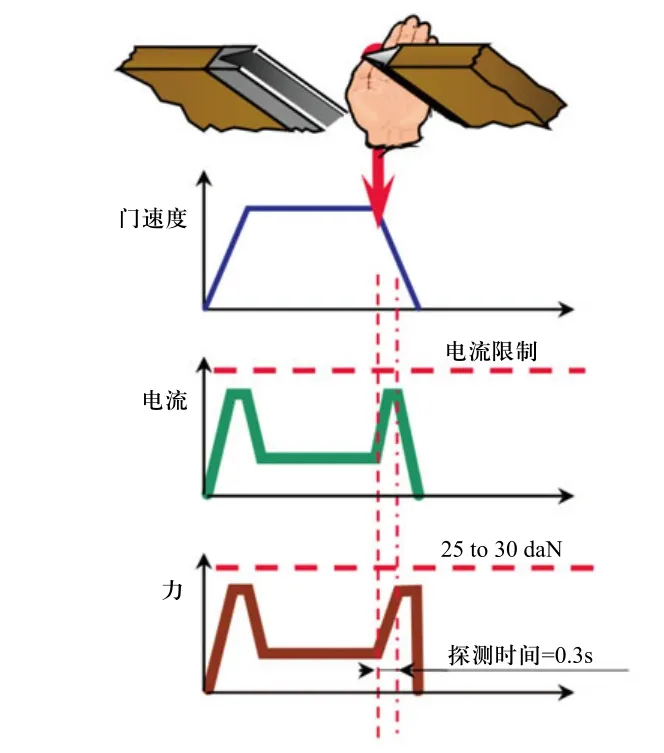
图3 开关门障碍物探测系统流程图
5 结束语
站台安全门系统已成为地铁安全运营中重要的一个专业设备,直接影响地铁的安全和正常运营。站台安全门的DCU是门体控制的核心部件,其性能直接决定站台安全门运行的安全系数。本文通过对站台安全门系统DCU的控制原理进行分析,给出了DCU的接口、逻辑及驱动单元功能设计,并根据运营需要设计了冗余设计和障碍物检测的优化功能,对于站台安全门系统核心设备的国产化具有重要意义。
[1] 陈韶章. 地下铁道站台屏蔽门系统[M]. 北京: 科学出版社, 2005.
[2] 陈海辉, 胡跃明, 熊建明. 地铁屏蔽门控制系统方案[J].华南理工大学学报(自然科学版), 2002, 30(4), 44-47.
[3] 郭庆鼎, 赵希梅. 直流无刷电动机原理与技术应用[M].中国电力出版社, 2008.
[4] 叶宏. 地铁屏蔽门障碍物探测方案的探讨[J]. 工业控制计算机, 2008, 21(7): 68-69.
猜你喜欢
肝博士(2024年1期)2024-03-12 08:38:12
红蜻蜓·低年级(2023年4期)2023-04-24 09:17:38
中国特种设备安全(2021年7期)2022-01-19 05:07:58
家电科技(2021年5期)2021-11-09 11:17:46
中国新闻周刊(2021年2期)2021-01-29 05:17:19
中国生殖健康(2020年2期)2021-01-18 02:51:34
小溪流(故事作文)(2018年10期)2018-12-28 10:45:08
中国生殖健康(2018年2期)2018-11-06 07:10:56
小布老虎(2017年4期)2017-08-10 08:22:40
西南军医(2016年3期)2016-01-23 02:17:41
