机器人甲状腺切除术在韩国将成为一种新的规范术式?
2012-08-20 09:47潘笑露翻译审校
中国微创外科杂志 2012年7期
潘笑露 翻译 嵇 武 审校
(南京军区南京总医院解放军普通外科研究所,南京 210002)
甲状腺疾病的风险随着年龄的增长而升高[1]。在韩国越来越多的甲状腺恶性肿瘤患者被检出。尽管对是否应广泛开展甲状腺疾病的超声筛查还没有共识,主动要求参与筛查的病人数不断增加[2]。超声导向细针穿刺活检细胞学检查的进展也带来了极早期不可扪及阶段的甲状腺恶性肿瘤的高检出率。同时,据全国范围内统计,甲状腺癌为韩国女性最常见的肿瘤,占全部肿瘤发生率的23.5%,该病正以每年26.0%的增长率逐年大幅增加[3]。
传统开放性甲状腺手术是常规手术方法,具有并发症低的特点。但是,尽管可以出于美观将切口沿皮肤褶皱方向开口并置于颈部尽可能低处,该术式仍无法避免颈部可见的手术瘢痕。不幸的是,可疑的甲状腺病变通常发生于中青年女性人群,绝大多数病人一生中都不会出现术后机能异常,因此良好的术后美容效果成为首要的问题。
由于对原有颈部外观进行保护的需求日益增加,已有学者在避免或减小颈部瘢痕上进行了若干项甲状腺手术技术的实践。1996年,Gagner[4]首次将腔镜运用于甲状旁腺手术中;1997年,Huscher[5]首创了腔镜甲状腺腺叶切除术。从那时以来,已有通过颈部、胸壁、腋窝及乳房等几种不同的手术路径的手术报道[6,7]。在韩国,Bae 等[8]报道腔镜甲状腺切除术正日益流行。但是,腔镜法的手术时间比传统术式的手术时间更长,特别是当术者并不十分熟练的时候。腔镜法最常用的手术路径是经腋径路(transaxillary approach,TAA)
经双侧腋窝和乳晕入路(bilateral axillo-breast approach,BABA)的腔镜技术首先由 Choe 等[9]报道。我们回顾分析了从那之后总计512例手术,认为BABA法腔镜甲状腺切除术是安全有效的,可产生近乎完美的外科效果——低术后并发症风险、低术后复发率及良好的美容效果[10]。
目前,TAA法及BABA法在韩国是最为广泛应用的腔镜方法。但是,腔镜法在技术上的高要求,给术者带来巨大挑战,因此该法并没有在韩国得到广泛使用。另一方面,随着机器人技术在腔镜甲状腺手术上的进展,更多术者开始机器人辅助甲状腺切除术(robotic-assisted thyroidectomy,RoT)的实践。
1 韩国机器人甲状腺手术的开展
第一例头颈部机器人手术是由 Lobe等[11]于2005年完成的。他们提出,机器人手术将在不久的将来在该领域内一展宏图。自此,机器人甲状腺手术的例数在世界范围内不断增加。
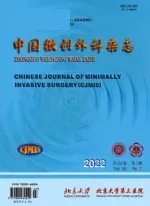
根据韩国国立循证医学合作机构(NECA)统计[12],自2007年起,机器人手术所占全部手术的比例大幅增加(图1)。2005年7月~2010年10月,共有13 700例机器人手术,而仅2010年就有5500例。这其中大部分手术是由普外科和泌尿外科操作的(图2)。此外,韩国的监测数据显示[13],机器人甲状腺切除术为韩国最常见的机器人手术(图3)。
目前,机器人甲状腺手术在韩国的趋势还未见报道。我们制定了一份对甲状腺手术的看法的问卷[14],询问术者在该技术在我国的发展状态上的意见。结果表明,术者更倾向于TAA法及BABA法。大多数术者认为,机器人甲状腺切除术将会有更大的发展,但发展将与挑战并存。其中主要的障碍为患者要承担的昂贵费用以及患者对该方法的不了解。
显然,由于许多优点,这些术式正越来越受欢迎,尤其是在早期甲状腺的恶性疾病中。此外,许多研究已经表明机器人手术良好的美容效果使患者受益,并将减少颈部不适[15,16]。
就手术的彻底性而言,有几项研究用术后甲状腺球蛋白水平(thyroglobulin,Tg)作为指标对机器人法在该方面的应用进行了研究。我们回顾分析了109例乳头状甲状腺癌的术后情况,均行甲状腺切除术和中央组淋巴结清扫术[17]。其中未进行放射性碘(RAI)治疗的病人有 98%Tg <1.0 μg/L,而经过RAI治疗的病人则有76%Tg<1.0 μg/L。进一步的倾向得分匹配研究表明,BABA法机器人辅助甲状腺手术与传统开放性甲状腺手术比较,二者在RAI摄取比例、甲状腺球蛋白激活水平及第一次放疗后Tg<1.0 μg/L的病人比率上并没有显著区别[18]。因此,我们可以认定BABA法机器人甲状腺切除术较其他术式更为有效。
另外,Kang等[19]回顾分析33例确诊为甲状腺癌合并颈淋巴结转移的病人,均行机器人TAA法手术及改良的颈部根治性清扫术(modified radical neck dissection,MRND),并且未发生如 Horner综合征等重大合并症或重要神经损伤。其中22例(66.7%)术后Tg<1 μg/L。因此,机器人辅助改良颈部根治性清扫术是在技术上可靠且安全的甲状腺癌合并颈部淋巴结转移病人的处置方法。问卷调查的数据显示,尽管TAA被认为是侧叶完整切除的更好选择,但大多数机器人甲状腺手术操作者认为BABA法较TAA法更容易完整切除两侧甲状腺且美容效果更好。
同时,术者认为,由于腔镜甲状腺切除术掌握起来较为困难,该术并未得到广泛普及。而机器人手术的直观性则意味着其较腔镜法更易于学习。机器人手术还拥有诸多优势,例如更好的三维术野及可帮助术者更为灵巧地消除手部震颤的功能让操作更加精确。Lee等[20]报道,有腔镜甲状腺手术经验的术者用于掌握机器人甲状腺切除术的时间比掌握腔镜法更短。术者需要操作50例全甲状腺切除术及40例甲状腺次全切除术以掌握机器人法,而传统腔镜单侧叶切除术则约需一个熟练的内分泌外科大夫操作约60例手术。
除此之外,机器人辅助甲状腺切除手术为术者提供了一个良好的人体工程学环境。最重要的是,操作者可在术中独立控制摄像头,这保证了手术全过程中的最佳术野。韩国的一个多中心研究[21]评估在该法术中外科医生在人体工程学上的考虑因素。与开放或腔镜甲状腺切除术相比,术者在机器人辅助甲状腺切除术中感受到较少的骨骼和肌肉不适。
2 BABA机器人甲状腺切除术
首尔国立大学医院(Seoul National University Hospital,SNUH)是BABA法腔镜甲状腺切除术的先驱,并自2008年开始了机器人BABA甲状腺手术的实践[22]。我们首个机器人手术的细节及相关情况发表于2009年[23]。术野(图4)及相关手术步骤概述(表1)见图示。我们倾向于该方法,这是因为该法两侧叶的对称视野以及其与开放式手术技术上的相同性使术者更易于掌握操作方向。
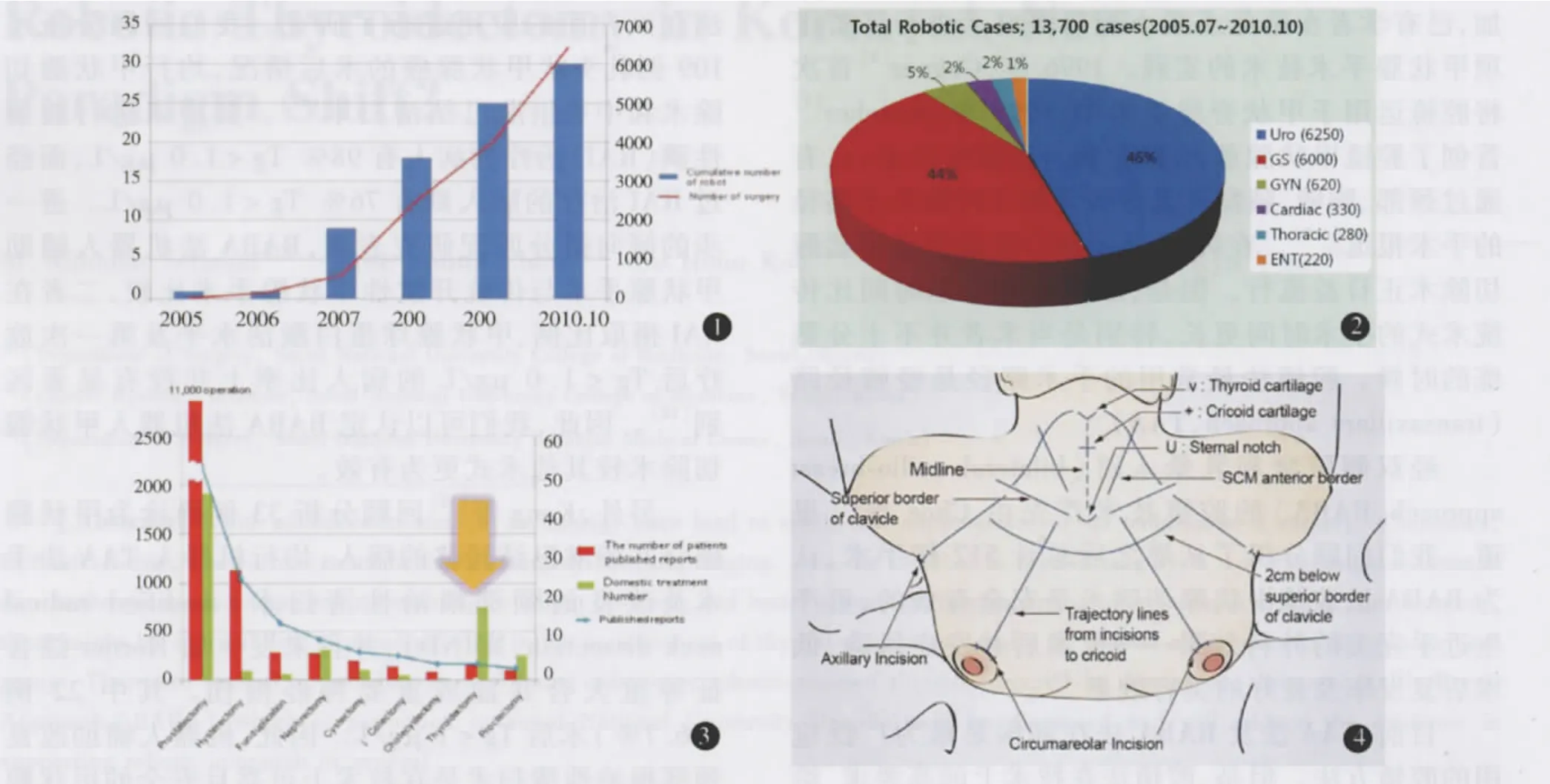
图1 近5年来韩国机器人手术的例数 图2 2010年韩国的机器人手术 图3 2008年文献中报道的病人例数与在韩国治疗的病人例数对比 图4 手术的定位标记
3 展望
机器人外科手术更精确的手术操作及良好的人体工程学效应使更多新的甲状腺切除方法成为可能。经自然腔道内镜手术(naturalorifices transluminal endoscopic surgery,NOTES)正得到越来越多的应用。经口咽-舌下入路甲状腺切除术已在尸体及活猪上实验成功[24,25],为中央室甲状腺切除术提供一种新的无瘢痕手术方法。但是,该法仍需评估,如关于手术感染风险等的其他问题仍亟待进一步讨论。
我们已成功施行经双侧腋窝耳后入路腔镜甲状腺切除术(endoscopic thyroidectomy via bilateral axillo- postauricular approach,BAPA)[26]。该法是为了女性,尤其是那些不希望手术破坏乳房区域的年轻女性而开展的。但此法在技术上特别是给助手们带来了挑战,该方法的手术视野与常规手术视野呈镜面影像。尽管可以运用镜面影像监视器,手术助手仍需时间去训练合适的手眼协调。在机器人手术中,该问题由于机器人系统的存在得以轻松解决。
除了上述优点,有几位作者报道机器人纵隔异位甲状腺肿的成功切除[27,28]。该法运用胸腔镜,作者们认为机器人操作系统提供了较传统胸腔镜更优秀的视觉上的控制及操作精确性。
4 总结
机器人手术毫无疑问将成为治疗甲状腺疾病的规范术式,特别是对于年轻人群中的微小肿瘤性甲状腺肿。这是由于此法较腔镜甲状腺切除术的显而易见的技术优势。
除病人将免于颈部可见瘢痕带来的烦恼外,机器人甲状腺切除术,无论是BABA法或TAA法,与开放式手术有着相近的手术风险及预后。而最重要的是,病人由于手术瘢痕的不明显对手术的美容效果非常满意。从术者的角度上看,机器人甲状腺手术优秀的人体工程学及器械操作将为操作提供极大的帮助。
机器人甲状腺手术的惟一缺点是该法为病人和公共卫生系统带来的沉重经济负担。目前未见关于机器人手术成本效益分析的研究。因此,术者应小心选择机器人辅助甲状腺手术的适应证。幸运的是,随着机器人手术花费的下降,该技术将在未来得到更广泛的应用。
1 Berghout A,Wiersinga WM,Smits NJ,et al.The interrelationships between age,thyroid volume,thyroid nodularity and thyroid function in patients with sporadic nontoxic goitre.Am J Med,1990,89:602 -608.
2 Nam-Goong IS,Kim HY,Gong G,et al.Ultrasonography-guided fineneedle aspiration of thyroid incidentaloma:correlation with pathological findings.Clin Endocrinol(Oxf),2004,60:21 -28.
3 The Korea Central Cancer Registry(KCCR)2009.Ministry of Health& Welfare(MOHW).Korea
4 Gagner M.Endoscopic subtotal parathyroidectomy in patients with primary hyperparathyroidism.Br J Surg,1996,83:875.
5 Huscher CS,Chiodini S,Napolitano C,et al.Endoscopic right thyroid lobectomy.Surg Endosc,1997,11:877.
6 Slotema ET,Sebag F,Henry JF.What is the evidence for endoscopic thyroidectomy in the management of benign thyroid disease?World J Surg,2008,32(7):1325 -1332.
7 Tan CT,Cheah WK,Delbridge L.“Scarless”(in the neck)endoscopic thyroidectomy(SET):an evidence-based review of published techniques.World J Surg,2008,32(7):1349 -1357.
8 Bae J,Cho YU,Sung GY,et al.The current status of endoscopic thyroidectomy in Korea.Surg Laparosc Endosc Percutan Tech,2008,18:231-235.
9 Choe JH,Kim SW,Chung KW,et al.Endoscopic thyroidectomy using a new bilateral axillo-breast approach.World J Surg,2007,31(3):601-606.
10 Choi JY,Lee KE,Chung KW,et al.Endoscopic thyroidectomy via bilateral axillo-breast approach(BABA):review of 512 cases in a single institute.Surg Endosc,2012,26(4):948 -955.
11 Lobe TE,Wright SK,Irish MS.Novel uses of surgical robotics in head and neck surgery.J Laparoendosc Adv Surg Tech A,2005,15:647-652.
12 National Evidence-based Healthcare Collaborating Agency,Korea(NECA)
13 Biorobotics and Surveillance Data,Korea
14 Bae DS,Choi JY,Lee KE,et al.Survey questionnaire:assessment of benefits and challenges of robotic thyroid surgery by Korean surgeons.Free paper presentation Korean Surgical Society Annual Congress Nov 2011.
15 Lee J,Nah KY,Kim RM,et al.Differences in postoperative outcomes, function, and cosmesis:open versus robotic thyroidectomy.Surg Endosc,2010,24:3186 -3194.
16 Tae K,Ji YB,Jeong JH,et al.Robotic thyroidectomy by a gasless unilateral axillo-breast or axillary approach:our early experiences.Surg Endosc,2011,25:221 -228.
17 Lee KE,Koo DH,Kim SJ,et al.Outcomes of 109 patients with papillary thyroid carcinoma who underwent robotic total thyroidectomy with central node dissection via the bilateral axillobreast approach.Surgery,2010,148:1207 -1213.
18 Lee KE,Koo HD,Im HJ,et al.Surgical completeness of bilateral axillo-breast approach robotic thyroidectomy:conventionalopen thyroidectomy after propensity score matching.Surgery,2011,150:1266-1274.
19 Kang SW,Lee SH,Ryu HR,et al.Initial experience with robotassisted modified radical neck dissection for the management of thyroid carcinoma with lateral neck node metastasis.Surgery,2010,148:1214-1221.
20 Lee J,Yun JH,MD,Nam KH,et al.The learning curve for robotic thyroidectomy:A multicenter study.Ann Surg Oncol,2011,18:226-232.
21 Lee J,Kang SW,Jung JJ,et al.Multicenter study of robotic thyroidectomy:short-term postoperative outcomes and surgeon ergonomic considerations.Ann Surg Oncol,2011,18:2538 - 2547.
22 Lee KE,Rao J,Youn YK.Endoscopic thyroidectomy with the da Vinci robot system using the bilateral axillary breast approach(BABA)technique:our initial experience.Surg Laparosc Endosc Percutan Tech,2009,19(3):e71 -75.
23 Lee KE,Choi JY,Youn YK.Bilateral axillo-breast approach robotic thyroidectomy.Surg Laparosc Endosc Percutan Tech,2011,21(4):230-236.
24 Witzel K,von Rahden BH,Kaminsk C,et al.Transoral access for endoscopic thyroid resection.Surg Endosc,2008,22:1871 -1875.
25 Karakas E,Steinfeldt T,Gockel A,et al.Transoral thyroid and parathyroid surgery.Surg Endosc,2010,24:1261 -1267.
26 Lee KE,Kim HY,Park WS,et al.Postauricular and axillary approach endoscopic neck surgery:a new technique.World J Surg,2009,33:767-772.
27 Augustin F,Schmid T,BodnerJ.The robotic approach for mediastinal lesions.Int J Med Robotics Comput Assist Surg,2006,2:262-270.
28 Bodner J,Fish J,Lottersberger AC,et al.Robotic resection of an ectopic goiter in the mediastinum.Surg Laparosc Endosc Percutan Tech,2005,15:249 -251.
猜你喜欢
现代仪器与医疗(2021年1期)2021-06-09
心电与循环(2021年1期)2021-02-05
昆明医科大学学报(2020年11期)2020-12-28
中华养生保健(2020年5期)2020-11-16
中华养生保健(2020年3期)2020-11-16
中国医学装备(2020年3期)2020-04-01
中国现代医药杂志(2020年12期)2020-02-06
中国医药指南(2018年21期)2018-01-22
中国内镜杂志(2017年2期)2017-03-20
腹腔镜外科杂志(2016年9期)2016-06-01