设施内智能精准喷雾植保设备研究开发
2012-08-14 03:25董微卓杰强王会学卜云龙程龙兰立波
中国蔬菜 2012年18期
董微卓杰强王会学卜云龙程龙兰立波
(北京京鹏环球科技股份有限公司,北京 100094)
近年来,我国设施农业发展迅速,截至2008年全国设施蔬菜面积已达334.67万hm2,设施蔬菜总产量1.68亿t,占全国蔬菜产量的25%,设施农业年产值逾4 100亿元。设施农业高产高效的同时,由于光照不足、长期密闭、高温高湿,加之缺少天敌,易诱发病虫害(王涛 等,2008)。设施农业中的病虫害防治有其特殊性,设施内部土地利用率高、种植密度大、行间通过性差,一般地面行走的植保机具难以在温室中使用。目前我国基本上没有温室设施内专用的植保机械,大都照搬传统、露地防治病虫害的施药技术,应用最广的仍为手动背负式喷雾器,这种喷雾法施药技术粗放,农药浪费现象严重,作业幅度窄、射程近,并且劳动强度大、工效低,最大的危害就是操作者必须在密闭的空间内施药,极易发生中毒事件(戴奋奋,2004)。
随着现代农业的发展,设施农业生产由单纯追求产量、效益型逐步转向“高产、优质、高效、安全、生态”并重发展的新阶段。本试验充分吸收了设施生产发达的国家在植保方面先进的低量喷雾技术、静电喷雾技术、自动对靶等技术,结合国情和农艺特点,开发优化无需操作者进入、不受温室作物品种和种植方式限制、适合于农药喷洒要求的智能精准喷雾植保设备,实现温室作物病虫害的机械化、自动化防治,对于提高作业工效,减少农药流失(陆琳,2007),避免农药危害人体及污染环境具有十分重要的意义。
1 智能精准喷雾植保设备组成结构
智能精准喷雾植保设备采用主机单轨,自动换行装置双轨的形式,主机完成单跨或单行的药液喷洒后退回自动换行装置上,由自动换行装置载运到下一跨或下一行重新开始工作。该喷雾植保设备(图 1)采用先进的超低容量冷雾技术进行植保作业。药液施用时,雾滴变得非常小,直径控制在10~50 μm,以达到最优的空间和表层分布(苑立强 等,2010)。这样就使得化学残留物得以很快分解,同时缩短农药的起效时间。该装置还装备了先进的自动对靶系统,喷杆接近作物时,传感器感应到后,喷头就会根据探测结果对作物喷雾,没有作物时喷头会自动停止喷雾,而有作物时又立即开始喷雾,所以该喷雾植保设备喷雾是时断时续的,这样就使喷雾有了针对性,药液的利用率大幅度提高(邓巍 等,2008)。在喷雾植保设备喷到温室栽培行的尽头时,所有喷头自动停喷,机器借助自动换行装置换到下一行之后再开始喷雾,这样不但节省了药液,还为换行后喷雾稳定喷雾压力。开发的智能精准喷雾植保设备主要由施药系统、控制系统、行走系统3大部分组成。
2 智能精准喷雾植保设备施药系统
本试验设计开发的施药系统主要由喷杆、水箱、液压泵、软管、电磁阀等部分组成(图2)。为实现喷雾植保设备在温室内自动行走并进行施药作业,本系统在温室上部沿长轴方向搭建两条导轨,在导轨上自由运动的主机可以带动喷杆(图 3)沿预定轨道做往复运动。该施药系统的喷杆固定在滑动小车上,喷头与水箱(图 4)之间通过软管进行连接,施药时,将混合好的农药倒入水箱中,药液由液压泵从水箱中抽出经出水软管送到各个喷头(图5)。为了实现喷头流量自动调节,在药液输出端安装一个能自动控制的电磁阀,电磁阀由单片机控制器的 I/O口对其进行脉宽调制控制,实现精准施药(陈勇和郑加强,2005)。

图1 智能精准喷雾植保设备
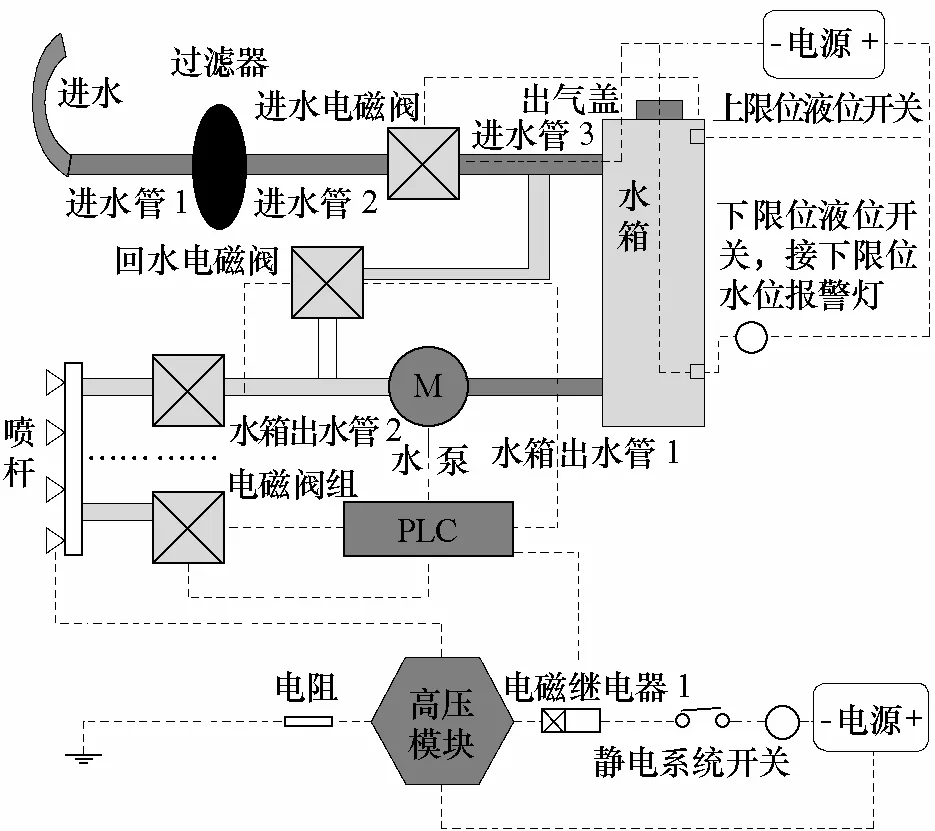
图2 施药系统组成及实施过程
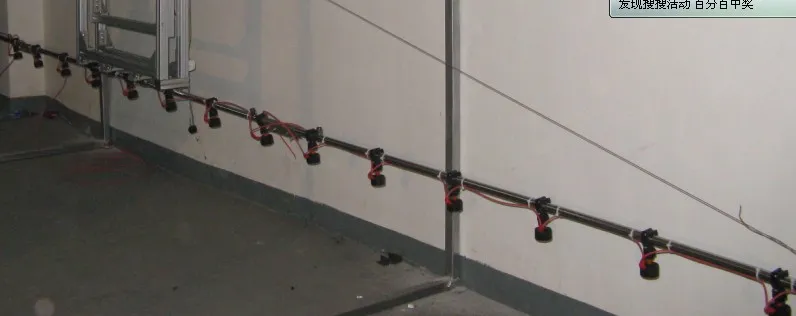
图3 智能精准喷雾植保设备的喷杆
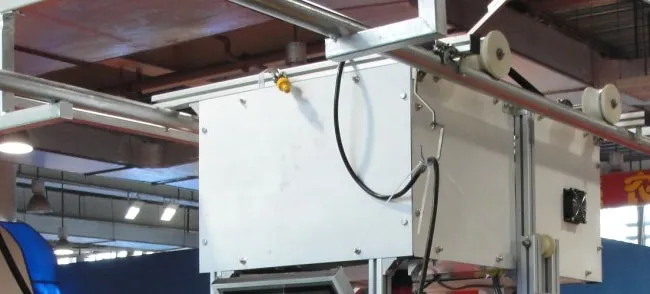
图4 智能精准喷雾植保设备的水箱

图5 智能精准喷雾植保设备的静电喷头
3 智能精准喷雾植保设备控制系统
控制系统主要由硬件系统和软件系统构成。软件系统包括上位机,主要通过控制界面设置喷杆高度、喷头流量、行走速度及串口工作参数等。硬件系统由PLC控制器组成(图2),主要用于接收上位机的串口数据信息,从而控制喷杆高度、喷头流量、行走速度等参数(陈勇和郑加强,2005)。
该控制系统对施药系统的控制方案是:① 喷施机工作过程中,水泵由总电源开关同时控制开闭,水泵处于常开状态,通过回水电磁阀开闭实现水流方向转换;② 信息采集系统确定喷施决策,传递至控制系统,喷施工作时,PLC控制相应电磁阀组开启,回水电磁阀关闭;③ 上限位液位开关控制进水电磁阀开闭状态,如果液位到达上限位,则关闭电磁阀,否则开启;④ 下限位开关控制水位报警灯,如果液位到达下限位,则开启报警灯,提示缺水;⑤ 电磁阀组由PLC控制器控制,由控制系统依据喷施决策进行开闭;⑥ 静电系统使用,首先需要开启静电系统总开关,静电指示灯亮,高压模块由电磁继电器开闭变换,电磁阀组开启时,电磁继电器闭合;⑦ 机械安装:过滤器、进水电磁阀、水箱、水泵、回水电磁阀处于一个模块,高压静电发生装置与水路适当分离,电磁阀组处于升降机构上,从而实现进水和出水。该控制系统的控制流程,如图6所示。
上位机为工控机,主要完成喷杆高度、喷头流量、行走速度及串口工作参数的设定、病害数据信息的采集、喷雾工作条件的判断、病害区域的位置确定以及对下位机PLC的监控。下位机为PLC,用于接收上位机的串口数据信息,从而控制喷杆高度、喷头流量、行走速度等参数。系统中机械臂各关节动作控制简单,且主要基于顺序模式进行工作。相比普通的嵌入式系统而言,PLC性能稳定、抗干扰能力强、编程简单,更加符合本系统的要求,因此下位机采用 PLC对移动平台和机械臂以及喷嘴组进行控制。移动平台由变频电机驱动,在高架导轨上行走,变频器已加载了梯形加减速程序,通过接收PLC发送的启停指令进行工作。交剪吊架由额定功率为20 W的交流减速电机驱动,运行速度40 mm·s-1,吊架行程2 500 mm并装有限位开关,也可通过程序设置软限位。交剪吊架配有专用控制器,通过RS485串口接收PLC的操作指令并反馈执行状态。直线导轨与腕关节都使用混合式步进电机驱动,配置细分驱动器,其中直线导轨采用步距角1.2°、保持转矩7 N·m的三相步进电机,导轨行程1 200 mm,并设有限位开关;腕关节采用步距角0.8°、保持转矩0.65 N·m 的两相步进电机,与减速比为1∶125的谐波减速器固连实现喷杆2 r·min-1的旋转速度,在90°位置时设有限位开关。6个喷嘴通过电磁阀实现单独开闭控制,喷嘴距离目标400 mm时的喷幅为120 mm×120 mm。电磁阀最高响应频率10 Hz。
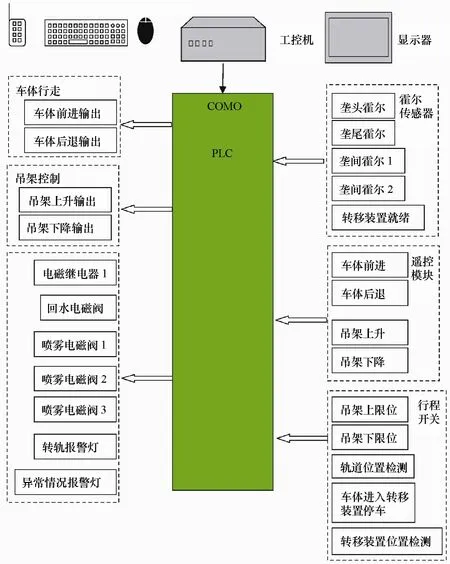
图6 控制系统流程图
4 智能精准喷雾植保设备行走系统
行走系统主要包括导轨、齿轮齿条、步进电机等部分。当电源开关开启时,由步进电机提供给施药系统动力,使其沿着行走系统的导轨进行喷施作业,当在温室内完成一个横向来回行程时,由跨间自动转移装置(图7)进行纵向转换,实现施药系统在温室下一跨的横向来回行走,如此循环。
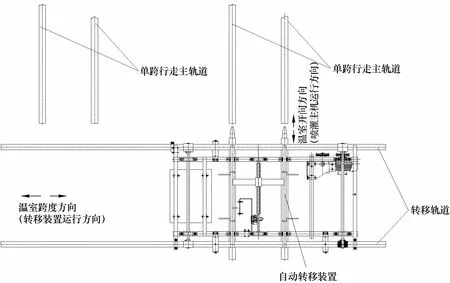
图7 跨间自动转移装置工作示意图
设施内智能精准喷雾植保设备的跨间自动转移装置采取程控行走方式。采用跨间自动转移装置优点是:转移装置的活动主轨道与行走主轨道的对接、喷雾植保设备的转移行走及换跨均靠程序自动完成,操作省时省力,充分发挥了喷雾植保设备主机的自控功能,不仅仅可在单跨内实现自动灌溉,而且可在整栋温室内实现自动灌溉。
本试验设计了定位精确、可靠程度高的喷雾植保设备跨间自动转移装置,采用了霍尔检测传感器定位(图 8),直线驱动器对轨道进行精确对位,实现了轨道的转移自动化和精确化,并将其与主机系统有效集成。

图8 霍尔检测传感器定位示意图
5 小结
本试验开发的设施内智能精准喷雾植保设备不受温室作物品种和种植方式限制,具有精准实用、性能优良、自动化程度高等特点,可极大提高农药的利用率,减少农药对环境的污染,减轻劳动强度,对于我国现代设施农业装备水平的提升有着积极的推动作用。
陈勇,郑加强.2005.精确施药可变量喷雾控制系统的研究.农业工程学报,21(5):69-72.
邓巍,何雄奎,张录达,曾爱军,宋坚利,邹建军.2008.自动对靶喷雾靶标红外探测研究.光谱学与光谱分析,28(10):2285-2289.
戴奋奋.2004.简述我国施药技术的发展趋势.植物保护,30(4):5-8.
陆琳.2007.发达的国外植保机械化.云南农业,(4):23.
王涛,何金戈,廖宇兰,李粤,梁栋.2008.植物保护喷雾机械的发展研究状况综述.安徽农学通报,14(21):163-164.
苑立强,贾首星,沈从举,孟祥金.2010.静电喷雾技术的基础研究.农机化研究,(3):28-30.
猜你喜欢
农业装备与车辆工程(2022年5期)2022-10-31
中国农机化学报(2022年8期)2022-08-12
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
农业机械学报(2022年2期)2022-03-14
今日农业(2021年17期)2021-11-26
中国品牌(2020年4期)2020-11-16
今日农业(2020年18期)2020-10-27
湖北农机化(2020年4期)2020-07-24
汽车与驾驶维修(维修版)(2019年3期)2019-05-08