
基于模糊神经网络的道岔故障诊断系统研究
2012-08-06 09:37李雅美魏文军
铁路计算机应用 2012年1期
李雅美,魏文军
(兰州交通大学光电技术与智能控制教育部重点实验室,兰州730070)
随着铁路建设的发展,对于信号设备的安全可靠性及行车效率的要求越来越高,道岔作为限制列车运行速度的关键设备之一,必须提高其可靠性。本文提出了一种基于模糊神经网络的故障诊断方法,它具有模糊逻辑与神经网络两种系统的优势,不但可以确定故障类型,而且利用模糊权重的概念,能够进一步对故障的严重程度进行判断,提高了故障诊断的准确率。
1 模糊神经网络
1.1 模糊理论与神经网络的结合
神经网络具有处理非线性知识、自学习和并行计算等方面的能力,适用于处理非结构信息。模糊系统具有处理模糊信息的能力,对处理结构低的知识更为有效。将模糊理论与神经网络相结合,采用模糊神经网络进行故障诊断,同时具有模糊逻辑和神经网络的优点,既能够处理专家知识和经验,又能够通过强大的自学习能力和数据处理能力增强系统的决策能力。利用神经网络的自学习能力,优化模糊逻辑系统中的模糊规则、隶属函数和模糊决策算法,经过模糊化处理使得神经网络的训练样本更精确,加快学习速度,提高诊断精度,成为更完善的故障诊断模型。
1.2 模糊神经网络结构及学习算法
本文采用串联型模糊神经网络实现道岔故障诊断,网络由模糊化处理和常规BP网络组成,模糊处理部分的隶属函数将输入数据进行模糊化处理,经模糊化处理后的数据送给BP网络进行训练,输出数据与期望的目标输出进行比较,根据误差反向调整BP网络的连接权。
1.2.1 串联型模糊神经网络组成
串联型模糊神经网络由4层组成:
(1)第1层为输入层,该层节点从外部接收输入数据并传送到下一层。
(2)第2层为模糊化层,该层是对输入进行模糊化处理,计算各输入分量的隶属度函数值。隶属函数采用升半柯西分布函数。数学表达式为:
(3)第3层通过权与模糊化层的输出相连,为BP网络的隐层。
(4)第4层是输出层,为BP网络的输出层。
1.2.2 神经网络算法改进
由于标准BP算法存在收敛速度慢、容易陷入局部极小值等缺陷,本文采用弹性BP算法加快网络的收敛速度。其传递函数为,简称为S型函数。弹性BP算法的目的是消除梯度幅度的不利影响,在进行权值的修正时,仅仅用到偏导的符号,而其幅值却不影响权值的修正,权值的大小仅仅取决于与幅值无关的修正值。如果权值在相同的梯度上连续被修正,则其幅度必将增加,从而克服了梯度幅度偏导的不利影响,即:
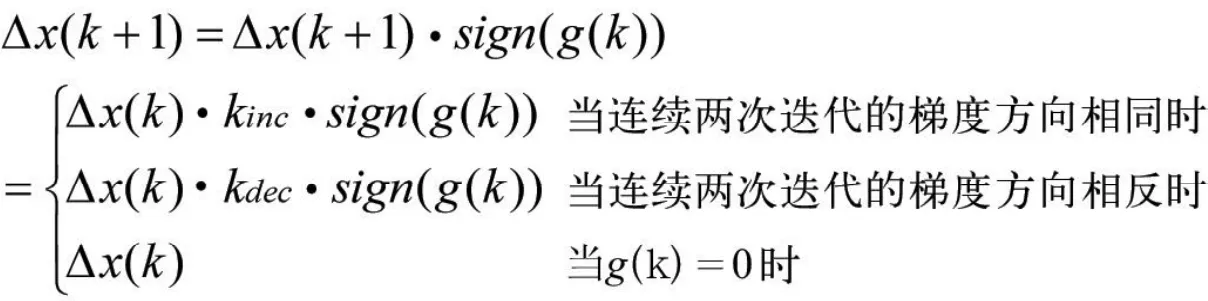
式中:g(k)为第k次迭代的梯度;x(k)为权值或阈值第k次迭代的幅度修正值,其初始值△x(0)是用户设置的;增量因子kinc和减量因子kdec也是用户设置的。
2 道岔故障诊断系统的实现
2.1 系统整体设计
将模糊神经网络应用于道岔故障诊断,利用Visual C++和Matlab混合编程的方法构造一个简单的故障诊断系统对道岔故障进行诊断。本系统包括4个部分:样本数据的采集,模糊化处理,BP神经网络的训练,故障诊断界面的实现。故障诊断界面主要由故障数据输入界面和诊断结果输出界面组成。
道岔故障诊断系统的总体结构如图1。
2.2 道岔故障诊断过程
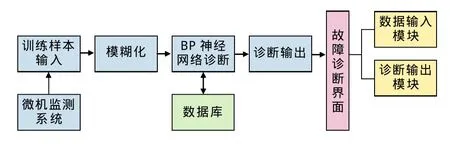
图1 道岔故障诊断系统的总体结构图
微机监测系统获得道岔各种状态的数据信息,经过模糊化处理作为BP神经网络的训练样本输入,当网络权值与阈值达到稳定时即可进行故障诊断。把训练好的神经网络作为故障诊断的依据,存入数据库,当监测到新的状态数据时,首先进行搜索,将该状态信息与数据库中的信息进行对比,如果数据库中存在此种故障类型,则直接将诊断结果输出到诊断界面,如果不存在,则利用模糊神经网络故障诊断模块进行推理,得出诊断结果,并将此种故障类型存入数据库。
2.3 软件实现
采用Visual C++与Matlab混合编程完成故障诊断,Visual C++的程序作为前端客户机,通过调用Matlab引擎在后台与Matlab服务器建立连接,实现动态通信。在Matlab中对神经网络进行训练仿真,以.mat文件格式保存,Visual C++通过调用Matlab神经网络工具箱的方法,调用训练好的神经网络,实现故障诊断。
3 道岔故障诊断实例验证
3.1 道岔动作电流曲线分析
通过对转辙机动作电流曲线的分析,判断道岔转辙机的电气特性、时间特性和机械特性,反映道岔转辙机的故障情况。道岔动作电流曲线如图2,曲线1和3为故障曲线,曲线2为正常曲线。

图2 道岔动作电流曲线比较图
对正常情况与故障情况的道岔动作电流进行分析,当道岔动作电流正常时,动作电流曲线的特点:
(1)在道岔启动的瞬间,电机启动电路中有较大的电流,曲线骤升,形成一个尖峰,峰值通常为6 A~10 A。若峰值过高,说明道岔电机有匝间短路。曲线由启动时的高峰变为平滑曲线的时间不能过长,一般应在0.5 s之内。如果这一时间延续过长,说明道岔启动困难。产生道岔启动困难的主要原因有道岔密贴力过大,即调整过紧;道岔尖轨反弹等。
(2)解锁阶段由于电阻增加,则动作电流迅速减小,电流至峰值后迅速回落,弧线应平顺,若有台阶或鼓包则为道岔密贴调整过紧造成解锁困难。
(3)01~03段平均值为转辙机工作电流,曲线应平滑,若电流幅值上下波动则有如下可能:滑床板凹凸不平、碳刷与整流子面接触不良或有污垢、电机有匝间短路。该段曲线若有大量的回零点,则为电机转子断线。
(4)03~04段为锁闭电流,一般高于工作电流,但不应高出0.25 A以上,若高出过多则为道岔密贴调整过紧。在03后有一段逐渐下滑的波动段,波峰与波谷间的电流之差应不大于0.35 A,若大于则为磨擦带不良。
对道岔动作电流异常曲线进行分析,曲线1在启动过程中的峰值过高,超过了道岔电流额定峰值,说明曲线1所示的道岔启动电路有短路或半短路情况存在。当启动完毕后,曲线1由峰值迅速回落的过程中有一个缓冲阶段,说明解锁电流大,可能存有故障。当解锁完毕后,曲线1远高于正常曲线,说明动作电流大,曲线1又突然呈上升趋势并达到摩擦电流的高度,可能存有故障。对于曲线3,在解锁完毕后该曲线低于额定电流,说明该道岔可能是摩擦带松、沾油、或固定不良;同时在该阶段,该曲线不是一条平滑的曲线,即动作电流不稳,这有可能是启动电路中各接点有接触不良。曲线3在锁闭阶段突然增大,可能存有故障。
3.2 故障诊断网络设计
选择道岔电流作为道岔故障诊断的特征参量,采集正常工作状态及各种故障状态下的适当的电流值数据,分析道岔电流曲线可以得到每种故障现象的故障论域,采用模糊诊断算法在监测到的故障征兆和故障原因之间建立隶属函数,对故障数据进行模糊处理,将其作为神经网络的训练样本,根据网络输出判断故障的类型。
对于道岔故障,考虑故障论域Y=(yi| i=1,2,…,7),如表1。
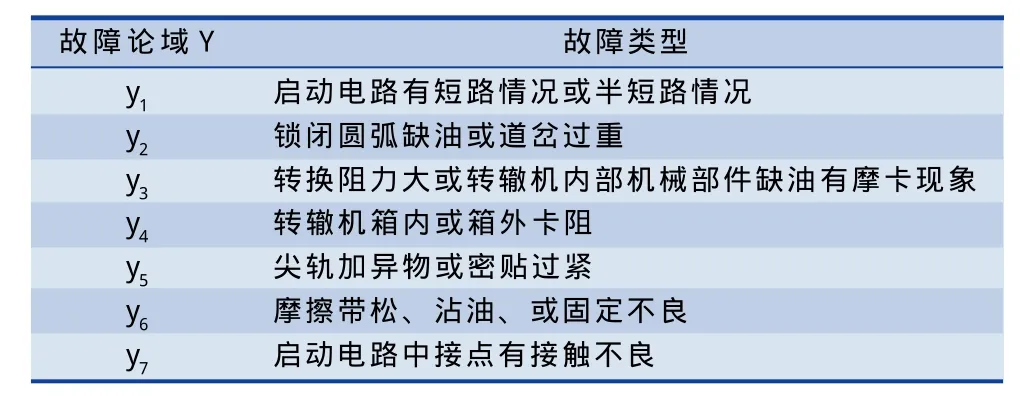
表1 道岔故障论域Y
考虑故障征兆论域X=(xj| j=1,2,…,10),如表2。

表2 道岔故障征兆论域X
创建BP神经网络,输入层的神经元个数为m=10,输出层神经元个数为n=7,隐层神经元个数(a∈[0,10] ),隐层神经元传递函数为s型正切函数tansig,输出层神经元传递函数为s型对数函数logsig,利用监测数据创建网络进行训练。
3.3 仿真实验
(1)根据模糊隶属函数对道岔故障数据进行处理,得到故障征兆模糊向量。
(2)将道岔故障征兆模糊向量作为神经网络的输入样本,与网络的目标输出一起输入神经网络进行训练。
(3)网络训练误差曲线,如图3。
由误差曲线可以看出,网络训练误差达到了预期目标,最小值大约为le-6。神经网络经过训练之后,对于监测到的任意一组状态数据作为神经网络输入都可以得出诊断结果。
通过微机监测系统监测到某一时刻的道岔启动电流曲线如图4,与正常状态下的电流曲线相比发现图4出现异常。
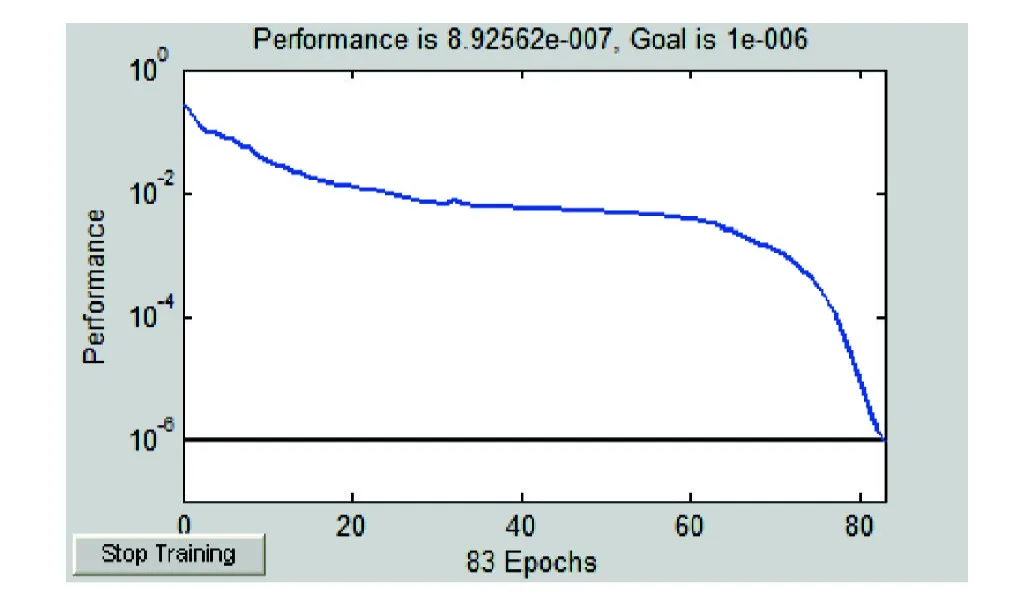
图3 网络训练误差曲线
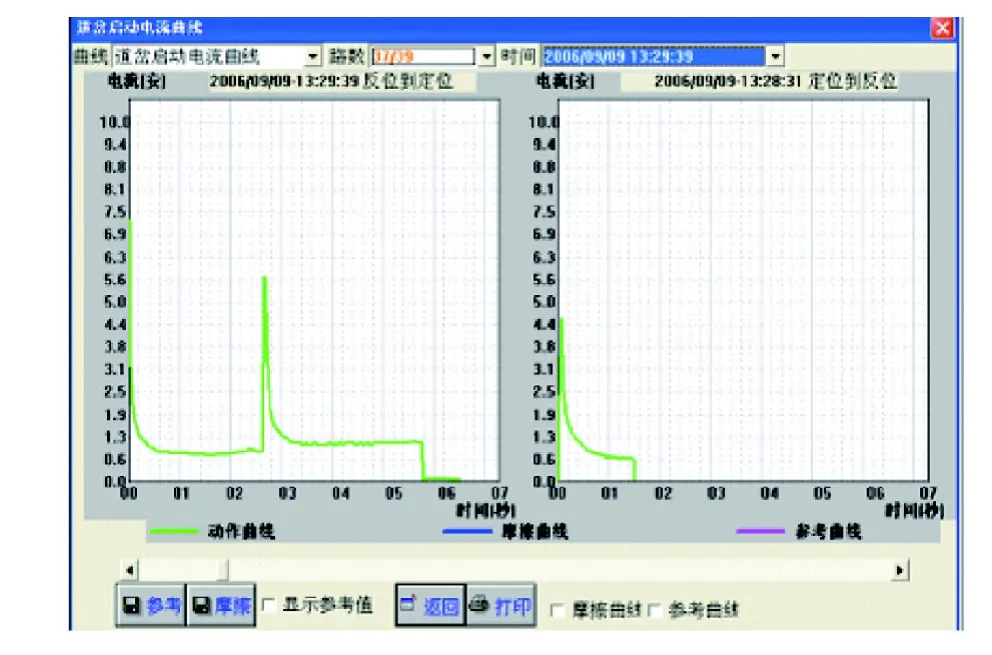
图4 道岔启动电流曲线
从动作电流曲线来看(13∶28∶31),由定位向反位转动时,电流曲线峰值偏小,经过1.5 s左右,电流突变为零,由此可以判断电路电阻偏大、动作电流偏小,不足使1DQJ自闭,1DQJ落下切断动作电路,使电流突变为零,控制盘面现象为道岔失去表示,处于四开状态。因为道岔没有表示,操作人员将道岔操纵回定位,从动作电流曲线来看(13:29:39),电流曲线峰值正常,在转换过程中曲线不平缓,出现峰值。
对故障征兆向量进行模糊化处理的到模糊征兆向量如表3。

表3 故障模糊向量X
将故障的模糊向量输入神经网络,输出结果为(0.0000,0.0000,0.0000,-0.0000,-0.0000,0.0000,1.0000),由输出结果判断故障类型为故障7,即道岔启动电路中接点有接触不良故障。
道岔一旦产生此种故障,则表现为道岔转换过程中,突然自己停转,控制台无表示,实际道岔在四开状态,产生此种故障的原因:(1)转辙机电气特性不良,使动作电流偏小,不足使1DQJ自闭;(2)1DQJ后线圈(1~2线圈)工作不良,可能为继电器与插座接触不良或线缆有虚接现象,从而使电路中电阻增大,电流减小,不能使1DQJ自闭,继电器保持不住。道岔由反位向定位转时道岔动作电流突然增大,产生此种故障的原因是:(1)在转换过程中出现卡阻,使电机出现短暂的半短路,电流出现峰值;(2)电机特性不良,线圈匝组间存在半短路状态;(3)1DQJ后线圈电路工作状态不良,存在虚接,瞬间的断开接触,使线圈出现较大感应电流,与电机动作电流重叠,出现较大的峰值。综合分析得出:电机特性不良;1DQJ后线圈工作状态不良。
对于故障严重程度的判断,需要利用权重的概念来对故障征兆进行处理,从而确定故障的程度。
道岔启动电路中接点有接触不良故障相关的征兆是:动作电流突然增大、动作电流小。结合征兆权重,得到了故障单征兆及多征兆组合的样本输出,以此作为训练样本对神经网络进行训练,则输出为故障的权重值,利用其判断故障的严重程度。
神经网络训练误差曲线如图5。

图5 网络训练误差曲线
由误差曲线可以看到,网络训练误差达到了预期的目标,经过17步达到误差最小值。
将道岔启动电路故障样本经模糊隶属函数处理后得到故障向量如表4。

表4 道岔启动电路故障样本
用训练好的神经网络对该故障向量进行诊断,可得到道岔启动电路故障的严重程度为0.9824。
4 结束语
道岔作为影响铁路运行效率与安全的关键设备,在发生故障时应尽快找出故障原因并解决,提高其可靠性和安全性,保证列车运行效率。本文采用的基于模糊神经网络的道岔故障诊断方法在微机监测系统实时监测道岔工作状态的基础上增加了智能故障诊断功能,对于提高道岔设备的可靠性具有重要现实意义。
[1] 党建武,王阳萍,赵庶旭. 神经网络理论[M] . 兰州:兰州大学出版社,2004,9.
[2] 闻新,周露,李翔,张宝伟. Matlab神经网络仿真与应用[M] . 北京:科学出版社,2003,7.
[3] 舒刚. 人工智能方法在车站信号故障诊断中的应用与研究[D] . 北京:北京交通大学,2008.
[4] 祝晓燕,王继选,刘小贞,赵冉. 基于小波包特征向量弹性BP算法的故障诊断[J] . 汽轮机技术,2008(6):437-439.
[5] 刘伯鸿,李国宁,李志强. 基于神经网络联锁系统故障诊断专家系统的研究[J] . 铁路计算机应用,2006,15(4):1-3.
[6] 王铁军. 基于神经网络的道岔智能故障诊断方法的研究[J] .西铁科技,2010(2):8-10.
[7] 曹宏丽,岳丽丽,杨福元.专家系统和神经网络在道岔控制电路故障诊断中的应用研究[J] . 黑龙江科技信息,2010(1):62-63.
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
现代装饰(2020年7期)2020-07-27
铁道通信信号(2020年10期)2020-02-07
铁道通信信号(2019年3期)2019-04-25
铁道通信信号(2018年10期)2018-12-06
基层中医药(2018年1期)2018-03-01
商(2016年28期)2016-10-27
小星星·阅读100分(高年级)(2016年5期)2016-05-14
小星星·阅读100分(高年级)(2016年4期)2016-04-28
凿岩机械气动工具(2014年3期)2014-03-01
