
基于DEDS故障诊断方法在GBM控制系统中的应用
2012-07-25 05:34:40林景栋
传感器与微系统 2012年2期
林景栋,谭 成
(重庆大学自动化学院,重庆 400044)
0 引言
基于离散事件动态系统(discrete event dynamic system,DEDS)监控理论的故障诊断技术是动态系统故障诊断的一种新途径[1],它具有[2,3]信号无衰减、诊断更可靠、输入与输出量均是数字量等特点。石膏砌块成型线(GBM)作业时的故障诊断具有鲜明的 DEDS特性,为此,本文采用DEDS故障诊断理论对GBM系统的故障情况进行在线监测和诊断[4]。实验结果表明:基于DEDS故障诊断理论的诊断效果明显,证明了DEDS故障诊断理论在GBM故障诊断中的可行性和有效性。
1 DEDS故障诊断基本理论
1.1 随机自动机模型的构建
被诊断的DEDS以自动机为模型,用四元组表示为

其中,X为系统状态集;∑为符号表,代表系统的事件集合;x0为系统初始状态;p为部分转移函数;由G产生的闭语言L(G)为系统行为。
DEDS中的事件分为可观事件∑0和不可观事件,即∑=∑0∪。故障事件集∑f根据故障类型可表示为几个互不相交的非空集合的并

如某Fi类故障发生,就表示集合∑fi中某事件发生。诊断的目的就是要找出哪个故障集合中的事件己经发生。
关于系统的可诊断性,其形式化定义如下:
定义 1[1,5,6]:假设语言L是闭语言且是有效的,给定可观映射P、故障集合∑f和故障划分∏f,如果满足下面条件,则L是可诊断的


1.2 随机诊断器模型
诊断器是故障诊断的执行机构,它基于系统模型G构建。诊断器在系统离线的时候用于判断系统的可诊断性;在线时可以观测系统行为并执行诊断。
定义故障标识集(设故障分为m类)

所有可能的标识集合Δ={N}∪2Δf,其中,N表示“正常”;E表示该类故障已经发生。
系统G的诊断器可表示为


定理1[1]:假设语言L是闭语言且是有效的,L的诊断器为Gd,Gd是可诊断的,当且仅当对任何一类故障Fi,Gd中不存在任何Fi不定环。
1.3 随机诊断器进行在线估计
通过概率转移矩阵的计算,可以在线地计算状态估计中每一个元素的概率,从而也能计算出故障发生的概率。
假设可观事件序列为s0=e1e2…en,对应的状态序列(q1,q2,…,qn),则非标准化的概率矩阵为

式中Φ(qi,ei)表示由可观事件ei驱动,从qi转移到下一个状态qi+1的状态转移矩阵。用E表示φun(s0)中各元素的和,则标准化的概率矩阵为

诊断故障时,设置其故障对象参数β,且0<β<1,如图1为参数变化趋势图,若Prob(F|S0)>β,则称故障F已经发生[5]。
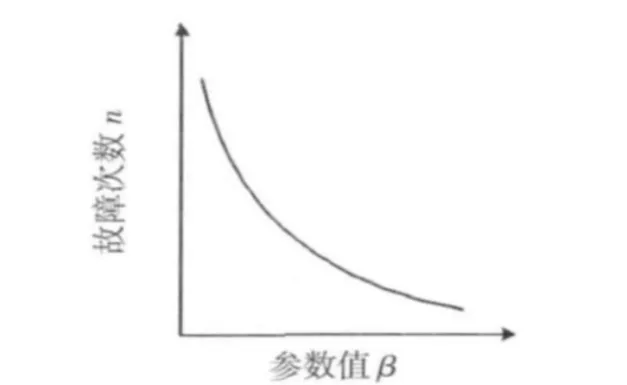
图1 参数值变化趋势图Fig 1 Change trend chart of parameter value
2 GBM灌注系统随机自动机模型的建立
2.1 GBM灌注系统
GBM灌注系统是整个GBM控制系统的重要环节,GBM灌注系统由控制器、搅拌机系统、电磁阀门、半球阀门、空压装置等组成,结构如图2所示。
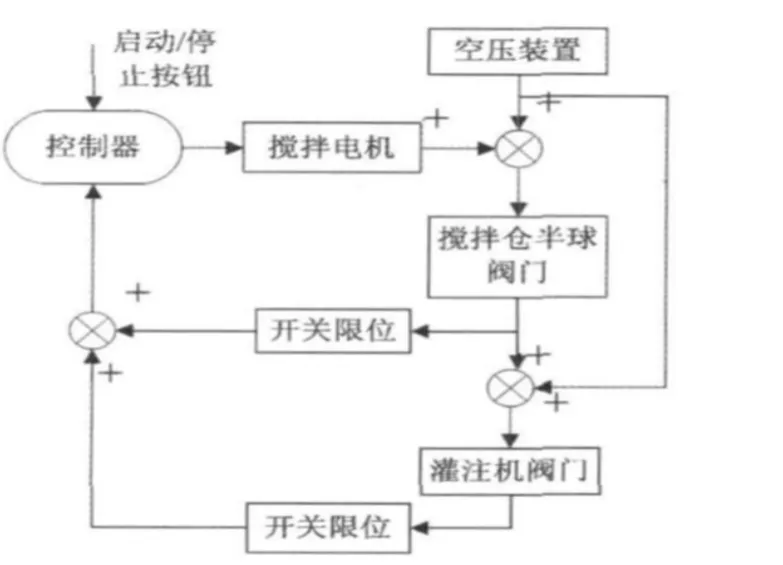
图2 GBM灌注系统结构图Fig 2 Structure diagram of GBM perfusion system
在整个GBM控制系统中,由于粉料与水混合后产生晶体会逐步凝固的特殊过程,GBM灌注系统是配料系统和模具成型系统的一个接口,同时也是GBM控制系统使用过程中故障率最高的部分。如果灌注系统控制出现故障,容易导致搅拌仓放料堵塞和灌注机堵塞现象,严重影响生产效率和维护效率。因此,需把灌注装置分离出来,建立故障诊断系统模型进行故障诊断。
2.2 GBM灌注系统随机自动机模型建立
2.2.1 半球阀门的随机自动机模型
GBM灌注系统运行后,搅拌仓半球阀闭合,启动搅拌电机并加入粉料和水,延时后打开搅拌仓半球阀,再延时后关闭搅拌仓半球阀,并向搅拌仓加水用于后面的灌注机清洗,延时打开搅拌仓半球阀清洗水,再延时关闭搅拌仓半球阀,等待下一次运行。
半球阀门的随机自动机模型如图3所示,建模为一随机自动机G=(X,∑,p,x0),状态集X={0,1,…,16,17},以图中的圆圈顶点表示。其中,0,1,2,3,4,5,6 分别代表GBM灌注系统正常情况下的待命状态、搅拌前初始化半球阀闭合、浆料制成后半球阀打开、清洗注水前闭合、注水到位后打开、清洗完成后关闭、GBM灌注系统运行和停止状态;7,8,9,10,11,12 和 13 分别表示 GBM 灌注系统在发生故障FL1后的待命状态,搅拌前初始化半球阀闭合、浆料制成后半球阀打开、清洗注水前闭合、注水到位后打开、清洗完成后关闭、GBM灌注系统运行和停止状态;14和15代表发生故障FL2后半球阀一直处于关闭状态,16,17则为未完全打开状态;事件集和可观测事件集分别为∑ ={M0,M1,M2,M3,M4,M5,M6,FL1,FL2},∑0={M0,M1,M2,M3,M4,M5,M6},不可观事件集(引起的转移为虚线);∑u0=(FL1,FL2),各事件的具体含义如下:根据实际数据采集和分析确定,半球阀初始闭合态M0(指阀门通过传感器检测关闭到位)发生的概率为0.85;浆料制成后半球阀打开M1(指阀门通过传感器检测打开到位),发生的概率为0.65;清洗注水前闭合M2,发生的概率0.8;注水到位后打开M3,发生的概率为0.9;清洗完成后关闭M4,发生的概率为0.9;GBM灌注系统启动运行M6,发生的概率为0.9;停止,发生的概率为0.9;半球阀门机械故障FL1,传感器无法输入故障FL2,FL1和FL2发生的概率都为1。在发生故障的情况下,Mn(n=0…6)发生的概率都为1。
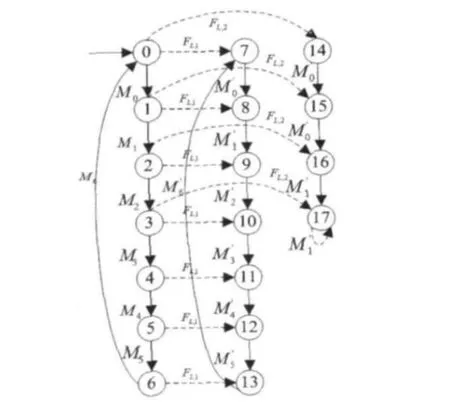
图3 随机自动机模型Fig 3 Random automata model
2.2.2 灌注机阀门的随机自动机模型
灌注机阀门的随机自动机模型基本与以上的半球阀门的随机自动机模型故障类似,建立模型也类似,在此省略。
3 GBM随机诊断器的构建与可诊断性分析
在线故障诊断主要体现在:1)在每一个可观测事件发生以后,估计系统当前的状态;2)根据估计的系统状态推测故障事件的发生;3)计算状态估计中每一个元素的发生概率。逻辑诊断器只能实现在线的前两项功能,但因为随机诊断器中每一个逻辑状态都有一个相关的概率矩阵,因此,能实现在线的故障诊断。
3.1 半球阀门随机诊断器的构建与在线估计
该诊断器模型诊断结果如图4所示,N代表正常状态,FL1和FL2代表故障标记。状态转移矩阵分别为


经过可观事件序列S0后,系统的逻辑状态为{(2,N),(5,F1),(l1,F2)},则随机诊断器的相应状态为q,φ=[0.40139 0.57500 0.02362]则可推断出 Prob((1,N)|S0)=0.40139;Prob(((6,FL1)|S0)=0.57500;Prob((11,FL2)|S0)=0.02362。若设定对象参数值为β=0.5,则可以推断故障FL1,已经发生,而没有发生FL2故障。
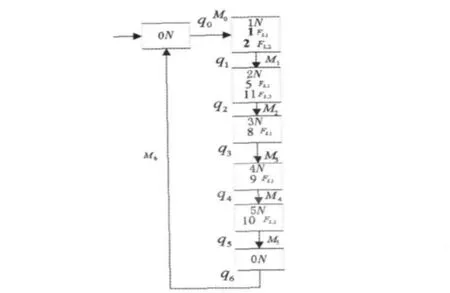
图4 随机诊断器模型Fig 4 Random diagnosis model
3.2 实验结果
根据以上方法,根据数据统计结果发现,设置参数β=0.5,GBM系统运行30d,即半球阀执行次数超过30,000次,由于故障出现后会导致凝固而无法执行其他程序,因此,故障可观测,在表1中正判数是与故障发生后人为观测的对比。结果表明:DEDS故障诊断方法在GBM故障诊断中效果明显。
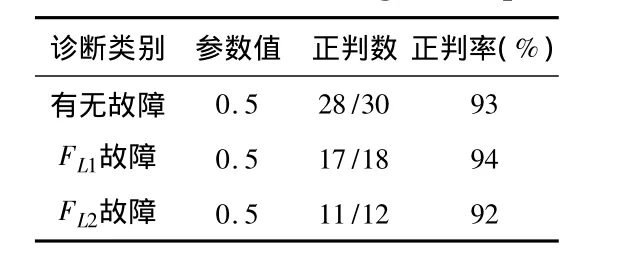
表1 DEDS诊断实验结果Tab 1 Results of DEDS diagnosis experiment
4 结论
本文介绍了DEDS故障诊断理论和GMB的故障诊断过程,实验结果表明:基于DEDS监控理论的故障诊断技术在GBM系统中有着良好的有效性和工程应用价值。适当选取参数值,其DEDS诊断方法更为明显。此方法为复杂的分布式或复杂的大型动态系统的故障诊断提供了一条有效途径。
[1]郑大钟,赵千川,离散事件动态系统[M].北京:清华大学出版社,2001:1-488.
[2]Fabre E,Benefits A,Jard C,et al.Distributed state reconstruction for discrete event systems[C]//Proc of 39th Conf Decision and Cont,Sydney,Australia,2000:2252 -2257.
[3]Lafortune S,Tenehetzis D,Sampath M,et al.Failure diagnosis of dynamic systems an approach based on discrete event systems[C]//Proclaimed Conf,Arlington-VA,2001:2058 -2071.
[4]徐 健,边信黔,王元慧.基于DEDS的AUV故障诊断问题研究[J].计算机仿真,2007,1(1):170 -173.
[5]宗 群,刘 利,刘文静,等.DEDS故障诊断方法在电梯中的应用[J].天津大学学报,2006,5(5):554 -558.
[6]Lini M R S,Rossi C.A fault detection and isolation method for complex industrial systems[J].IEEE Trans on Sits Man Cyber Parka Systems and Humans,2000,30(6):860 -865.
猜你喜欢
数学物理学报(2021年3期)2021-07-19 06:02:50
水电站机电技术(2020年1期)2020-02-28 01:59:10
智富时代(2019年4期)2019-06-01 07:35:00
水电站机电技术(2018年12期)2018-12-21 01:37:54
西部探矿工程(2018年12期)2018-11-21 05:34:04
西北大学学报(自然科学版)(2018年2期)2018-04-18 06:53:55
电网与清洁能源(2015年5期)2015-12-29 11:53:03
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
振动、测试与诊断(2014年5期)2014-03-01 01:14:21
机械与电子(2014年1期)2014-02-28 02:07:31
