
从三正交偶极子天线接收信号中估计飞行器姿态参数
2012-07-24 06:51陈广东
雷达学报 2012年2期
何 敏 陈广东* 张 凯
从三正交偶极子天线接收信号中估计飞行器姿态参数
何 敏 陈广东张 凯
(南京航空航天大学无人驾驶飞机研究院 南京 210016)
来自基站的极化电磁波包含的波达方向和极化状态信息,能建立飞行器姿态与大地坐标系的联系,因此利用机载三正交偶极子天线接收信号可以估计飞行器的姿态。该文研究了在只有一个基站信号和飞行器上单一接收点的条件下,如何实现飞行器的姿态感知,并推导了飞行器姿态估计算法。该文首先研究了估计波达角和极化椭圆倾斜角的算法,并分析了参数估计的性能,然后利用这些参数推算出飞行器的俯仰角、航向和横滚角,从而获得对飞行器进行控制的必要姿态信息。最后通过仿真实验验证了该方法的有效性。
三正交电偶极子天线;极化状态;波达方向;姿态估计
1 引言
飞行器的飞行姿态及其变化率是对飞行器进行控制的必要信息,这些信息多从惯导传感器(融合其它传感器)获取。惯导使用机械、光纤、激光陀螺等器件,结构复杂,造价高,不但占用空间,增加飞行器负载质量,耗费能量,还会累积误差。飞行器,尤其是无人飞行器,一般配备电磁波信息链(遥控遥测或卫星导航)。电磁波是雷达和通信等信息系统中承载信息的媒介,信号时延、多普勒频率、空间到达角和极化状态是其重要特征参量,能携带丰富的信息。目前国内外都研究在地球卫星导航系统接收端,利用多点接收,三角计算的方法感知姿态。飞行平台接收到的电磁波电场旋转椭圆包含了波达方向和极化角信息,这些信息不受飞行平台姿态及其运动影响,本文通过极化电磁波信号处理,估计飞行器姿态角,只需一个基站信号和飞行器上单一接收点,就可实现姿态感知。
与其他姿态测量相比,极化电磁波信号处理作为火箭、导弹或炮弹的姿态信息源,具有低成本,适应恶劣环境的特点;适宜科研试验和军事训练的靶机或试验导弹的空载设备使用,这些场所电磁波信息条件良好;该技术可用于卫星导航定位系统,使接收机具有姿态感知能力。
三正交偶极子天线与多点分布阵列天线相比,优势在于:(1)因其同点极化分集接收方式可处理宽带信号;(2)可全向接收信号,没有姿态测量范围的限制;(3)在有限的体积内实现3个独立的通道收发,制造技术成熟。Das 等人研究出一种由双极化圆形贴片和单极子构成的三极化天线。Gray 等人在他的文中介绍了一种由双极化介质谐振器和单极子构成的三极化天线。Itoh 等人则提出了一种由两个垂直缝隙和单极子构成的三极化天线。共形天线结构具有强度高、外形隐蔽、占用空间少等优点,在实际工程中已经得到了广泛的应用,国内三极化共形天线正在研制中。本文研究从理想3维极化天线,即三正交偶极子天线接收信号中估计飞行器姿态参数,获得飞行器航姿导航信息。电磁波由地面测控基站发出。本文以下介绍三正交电偶极子天线接收信号模型,波达方向、极化角和飞行器姿态角估计算法,估计精度,并用仿真实验验证了方法的有效性。
2 三正交电偶极子天线接收信号模型
(1)

,

排除了参数模糊后,三极子天线可全向工作,即飞行器的任何机动姿态下,本文方法都将有效。与信号频率相比飞行器姿态为慢速变化,即在相邻的快拍采样时间内(快拍采样频率最大可达信号频率,做到微秒级以下),可认为飞行器姿态保持不变。

图1 三正交电偶极子天线与极化电磁波椭圆状旋转电场
3 波达方向和极化角估计
若忽略噪声,将式(1)展开为
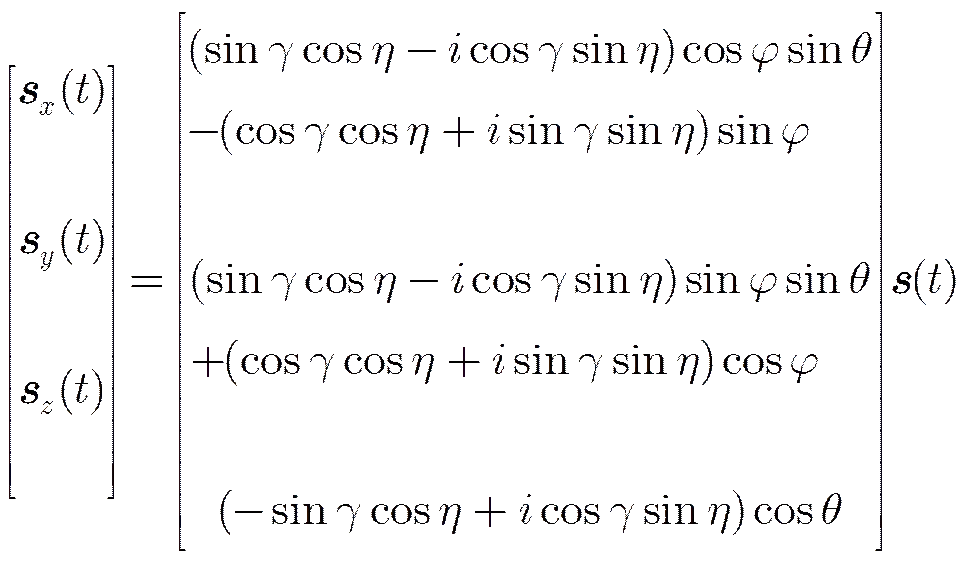
(2)

(4)
加入噪声后,以上方法估计精度较低。若要在噪声环境下获得高精度参数估计,可进一步应用最大似然估计。考虑到飞机与地面站距离不断变化,飞机所处空间环境不断变化,噪声方差和接收信号功率也不断变化。该信号模型快拍取样的似然函数为
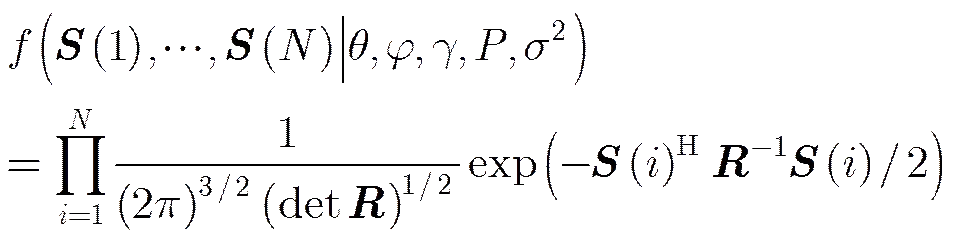
似然函数对数为
(5)
其中

(6)
这样最大似然估计简化为以式(2),式(3),式(4)的初始估计结果为中心,在小范围内进一步搜索,使接收信号的值最大。
同样利用聚焦的似然函数对数计算信号参数估计的CRB(Cramer Rao Bound)也能减少计算量,文献[11]证明了参数估计的CRB:

4 飞行器姿态角估计
为单位阵的3个列向量(下标表示所参照的坐标系)。
设基站所在位置的地理坐标系3轴方向分别为正北、正西和垂直地面向上(反重力方向)。设基站测得的对飞机的仰角为、方位角为偏北(逆时针向),在地理坐标系下发射信号的极化参数为,其中的极化椭圆倾斜角为固定值,可直接存储在飞机中,信号的极化椭圆率在接收端和发射端一致且已知。
该方法包括如下步骤:
步骤1 基站测量地理坐标系3轴方向,分别为正北、正西和垂直地面向上(反重力方向),作为姿态基准;
步骤3 运动平台通过极化敏感阵列天线接收来自基站的极化电磁波信号,并对该信号进行处理获得电磁波的波达方向和极化参数,以
步骤4 飞机载计算机从地面站遥控信号中获得基站对运动平台的仰角和方位角,根据基站测得的对飞机的仰角、方位角以及在地理坐标系下发射信号的极化椭圆倾斜角,可以得到波结构坐标系到地理坐标系的转换矩阵:

将波结构坐标系下的飞机姿态方向向量转换到地理坐标系下,就得到了地理坐标系下的飞机姿态方向向量:
由该地理坐标系下的飞机姿态方向向量即可确定飞机姿态,得到航向角、俯仰角和横滚角,实现姿态感知。将运动平台坐标系下的运动平台姿态方向向量先转换到波结构坐标系下,再转换到地理坐标系下,完成运动平台姿态感知。
本方法的实质是使运动平台获得比较基准,即基站标定的地理坐标系,计算出地理坐标系下的姿态,从而起到惯导姿态传感器和航向传感器的作用。步骤1,步骤2是所有测控基站都必须进行的工作,步骤3,步骤4才是为感知飞机姿态增加的工作。基站测控系统在跟踪飞机的过程中仰角、方位角可能要变化,需及时传递给机载系统(若飞机与基站满足远场条件,,基本不变化,可以不传或减少传递频率,总体而言增加的通信量极小)。极化椭圆倾斜角保持不变。
5 飞行器姿态角估计的CRB
基站天线通常比机载天线大得多,假设参数估计误差与机载天线相比可忽略,仅考虑机载天线的参数估计误差。以固定机翼飞机为例,由图1知,飞机姿态向量经坐标轴的3次连续转换

6 仿真实验
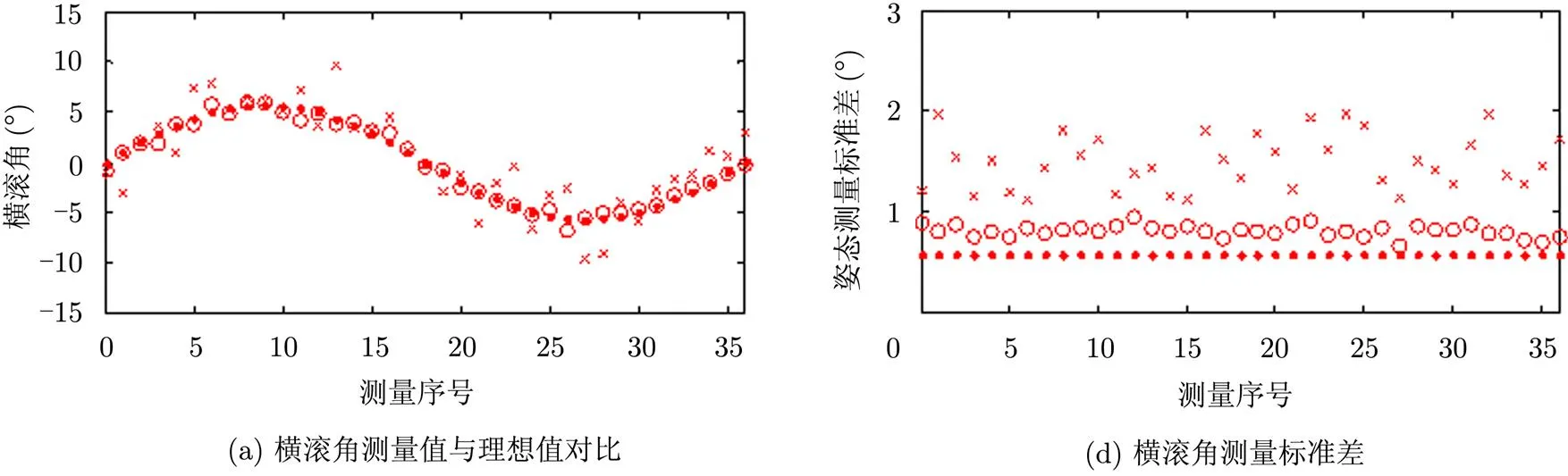
图2为从三正交电偶极子天线接收信号中估计飞行器姿态参数仿真结果。实验仿真了在飞行器航向角旋转90°,横滚角上下摆动,俯仰角保持为的连续航姿变化过程。其间根据电磁波信号估计飞行器姿态角,作了36次姿态测量,进行每次估计的接收信号包含1000快拍的椭圆极化信号,信噪比10 dB,快拍采样周期1,根据前文,这样的信号在横滚、航向和俯仰向具有不同的估计精度。图2横坐标为测量次数,图2(a), 2(b), 2(c)纵坐标为横滚角、航向角和俯仰角,坐标单位为度,图中“”曲线为理想角轨迹,“×”曲线为根据式(2),(3),式(4)的初始估计得出的横滚角、航向角和俯仰角;“°”为最大似然估计得出的横滚角、航向角和俯仰角。由图2(a), 2(b), 2(c)可见最大似然估计得出的结果与理想值更加接近。图2(d), 2(e), 2(f)横坐标与图2(a), 2(b), 2(c)相同,纵坐标为60次Monte Carlo实验统计出的与图2(a), 2(b), 2(c)对应各姿态角参数估计标准差,单位为度。图中“”线为参数估计的CRB,“×”和“°”线为初始估计和最大似然估计的标准差,由图2(d), 2(e), 2(f)可见各姿态角参数估计精度不同,时,航向角估计精度最高,俯仰角估计精度最低,以精度最低的俯仰角精度衡量,误差约为1°,达到普通飞行器控制的要求。
7 结论
从3维极化天线接收信号中估计飞行器姿态参数,精度达到飞行控制的要求,能作为自动驾驶仪航姿导航信息源。在实践中,极化电磁波测控系统已实现了信号的波达方向和极化参数实时估计,为本文的飞机姿态感知打下了技术基础。卡尔曼滤波加入飞行平台运动系统特征信息,姿态角经卡尔曼滤波后可获得更高的精度。该方法对于宽带信号也是有效的。从电磁波测控导航信号中估计飞行器姿态参数,测量速度比惯导快得多。多基站信号的姿态测量研究是下一步工作。
[1] Cho Am, Kang Young-shin,.. Altitude integration of radar altimeter and GPS/INS for automatic takeoff and landing of a UAV[C]. 2011 11th International Conference on Control, Automation and Systems, Kintex, Gyeonggi-do, Korea Oct. 26-29, 2011: 1429-1432.
[2] Han Songlai and Wang Jinling. Quantization and colored noises error modeling for inertial sensors for GPS/INS integration[J]., 2011, 11(6): 1493-1503.
[3] Axelrad P and Ward L M. Spacecraft attitude estimation using the global positioning system: methodology and result for RADCAL[J].,, 1996, 19(6): 1201-1209.
[4] 吴美平, 逯亮清. 北斗双星系统车辆定向技术[J]. 国防科技大学学报, 2006, 28(3): 89-93.
Wu Mei-ping and Lu Liang-qing. Research on vehicle heading determination through Beidou Bi-satellite system[J]., 2006, 28(3): 89-93.
[5] Junli Chen, Xiaoliang Wang,.. An integrated relative navigation system using GPSNISNAV for ultra-close spacecraft formation flying[C]. 2010 IEEESystems and Control in Aeronautics and Astronautics (ISSCAA), 2010: 803-808.
[6] Das N K, Inoue T, Taniguchi T,.. An experiment on MIMO system having three orthogonal polarization diversity branches in multipath-rich environment[C]. Proceeding of 2004 60th IEEE Vehicular Technology Conference. Los Angeles, USA, 2004,Vol. 2: 1528-1532.
[7] Gray D and Watanabe T. Three orthogonal polarization DRA-monopole ensemble [J]., 2003, 39(10): 766-767.
[8] Itoh K, Watanabe R, and Matsumoto T. Slotmonopole antenna system for energy-density reception at UHF[J]., 1979, 27(4): 485-489.
[9] Wong K T. Direction finding/polarization estimation-dipole and/or loop triads[J]., 2001, 37(2): 679-681.
[10] Pesavento M and Gershman A B. Maximum-likelihood direction-of-arrival estimation in the presence of unknown nonuniform noise[J]., 2001, 49(7): 1310-1324.
[11] Nehorai A and Paldi E. Vector-sensor array processing for electromagnetic source location[J]., 1994, 42(2): 376-398.
Aircraft Attitude/Heading Estimation Using a Dipole Triad Antenna
He Min Chen Guang-dong Zhang Kai
(Research Institute of Unmanned Aircraft, Nanjing University of Aeronautics and Astronautics,Nanjing210016, China)
This paper performs aircraft attitude/heading estimation using an airborne dipole triad antenna. The signal model is given with the parameters such as the wave Direction Of Arrival (DOA) and state of polarization. The algorithms for estimating the source DOA and electric ellipse orientation angle are presented along with their statistical performance analysis. From these parameters, the aircraft gesture angles about pitching, yawing, and rolling, which are needed by autopilot, are produced. Simulation results validate the proposed algorithm’s efficacy.
Dipole triad antenna; State of polarization; Direction Of Arrival (DOA); Attitude/Heading estimation
TN911
A
2095-283X(2012)02-0157-06
10.3724/SP.J.1300.2012.20036
2012-05-17收到,2012-05-21改回;2012-05-28网络优先出版
陈广东 steve_chen3596@163.com
何 敏(1988-),南京航空航天大学硕士研究生,研究方向为测控与导航。
陈广东(1968-),电子与信息系统博士,研究员,研究方向为探测与成像,合成孔径雷达技术,目前在南京航空航天大学工作。
张 凯(1986-),南京航空航天大学硕士研究生,研究方向为电磁波探测。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
现代财经-天津财经大学学报(2022年5期)2022-06-01
航天电子对抗(2022年2期)2022-05-24
哈尔滨工业大学学报(2022年5期)2022-04-19
北京航空航天大学学报(2021年9期)2021-11-02
消费电子(2021年7期)2021-08-10
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
空间科学学报(2021年6期)2021-03-09
北京航空航天大学学报(2020年10期)2020-11-14
