
基于半实物仿真系统的多假目标航迹欺骗研究
2012-07-13 06:28张国兵郎荣玲
电子设计工程 2012年12期
张国兵 , 郎荣玲
(1.北京航空航天大学 电子信息工程学院,北京 100083;2.中国人民解放军91336部队 河北 秦皇岛 066000)
雷达抗干扰技术和雷达干扰技术经过长期的对抗与较量,使双方都得到迅速发展,导致单一或简单的雷达干扰技术已经无法对现代雷达实施有效的干扰,虽然人们在不断地探索新的干扰技术,但是目前人们主要采用多种干扰技术复合使用,对敌方雷达实施有效的干扰,以便达到一定的战术或战略目的。例如针对目前搜索警戒雷达,它们采用低旁瓣、频率捷变等抗干扰技术,使得单一的距离假目标欺骗和方位欺骗难以对其进行有效的干扰,且干扰源容易暴露在雷达主瓣方向。而采用有源多假目标航迹欺骗干扰技术,可以逼真地模仿目标的运动轨迹,不容易被雷达剔除,从而增大了敌方情报系统的虚警率。这种干扰技术可用于掩护己方空中进攻或撤退,也可干扰敌方并诱敌开机,暴露兵力部署。所以,研究多假目标航迹欺骗技术具有重要的军事价值[1]。
1 半实物仿真的特点和优点
半实物仿真是指在仿真试验系统的仿真回路中接入所研究系统的部分实物的仿真。与其它仿真方法相比,半实物仿真具有以下特点:1)在所研究系统中有的部分很难建立起准确的数学模型,为了保留该部分的功能、性能的准确性,在半实物仿真中,该部分以实物与其它仿真分系统对接;2)是利用半实物仿真,还可以进一步修正系统的数学模型,提高数学模型的准确度;3)利用半实物仿真,将更直接、客观、有效地检验系统各设备的功能和性能[2]。
根据半实物仿真的特点,半实物仿真同其它的仿真方法相比具有实现更高真实度的可能性,是仿真技术中置信度最高的一种方法。在使用过程中,可以固化、重复某一工作状态,具有较高的实用性和可扩展性,而且半实物仿真具有研制周期短、经费低等优点。因此,利用半实物仿真手段研究多假目标航迹欺骗技术具有较强的真实性和实用性。
2 多假目标航迹欺骗的原理
2.1 实现多假目标航迹欺骗的条件
多假目标航迹欺骗主要是针对于搜索警戒雷达实施迷惑干扰,干扰机要想在敌方一部或者多部雷达终端显示器上形成任意想定的多假目标航迹路线,必须满足以下5个条件:1)干扰机的辐射功率必须足以使干扰信号从对方雷达天线旁瓣进入;2)必须侦察分析出雷达天线的扫描规律和主波束宽度,并精确测出其参数;3)干扰机的接收灵敏度必须足以接收到雷达的旁瓣信号;4)干扰机的辐射功率、假目标的持续时间和速度均可控,以模拟不同特征的目标;5)能精确测定辐射源的地理位置[4]。
2.2 航迹欺骗产生的原理
多目标欺骗航迹模拟电路的组成如图1所示,航迹模拟电路各点输出的波形如图2所示。T1是指接收机B收到的脉冲群,每一个脉冲延迟T1。

图1 航迹模拟电路组成方框图Fig.1 Composition of circuit for track simulation
TR/2代表的距离为欺骗源距雷达站的距离,ΔT1/2代表欺骗目标可以移动到与雷达站最近的距离。

ΔT0:代表欺骗目标可以移动的距离范围;
快锯齿波与慢锯齿波两者相交点表示产生欺骗脉冲点,锯齿波的斜率代表移动脉冲的速度;
ΔT2:代表欺骗目标航迹起始角延迟的时间;
T2:代表在雷达波束宽度内对应于目标的照射时间;
T:代表雷达的脉冲重复周期。
欺骗目标航迹的产生过程:根据欺骗源的位置,确定脉冲的延迟时间T1,使欺骗触发脉冲延迟到雷达脉冲第2个的后面,距第第2个脉冲为T0,用延迟了的脉冲触发单稳态电路,产生的宽度为T1,再用方波T1控制快锯齿波的产生。用一个慢锯齿与快锯齿相交,便产生了移动,这个移动脉冲就是我们要产生的欺骗目标。在方位上的欺骗是以收到的雷达主瓣信号为基础,把它延迟ΔT2,它所延迟的角度则为:

式中θ代表雷达旋转范围;t0为雷达天线转过θ角所需时间。
雷达转过第1圈时,延迟ΔT2,出来第1个亮点;
当转过第2圈时,延迟ΔT2+ΔTi,出现第2个亮点;
当转过第 3圈时,延迟 ΔT2+2ΔTi,出现第 3个亮点……依次类推。产生角度欺骗所需的时间为:

产生欺骗角度θn:

产生欺骗距离Rn:

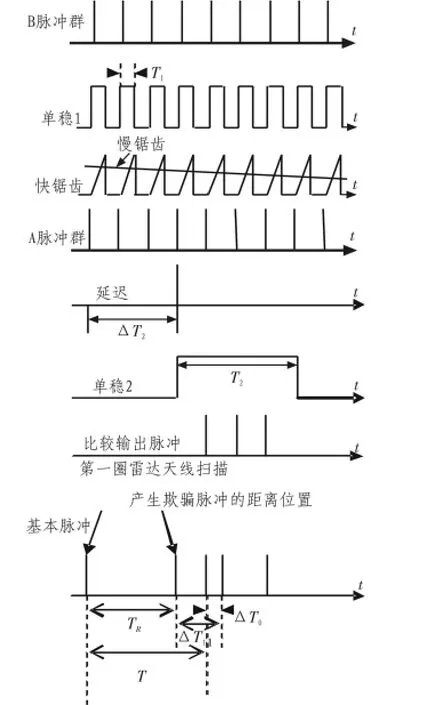
图2 航迹模拟电路各点输出波形关系图Fig.2 Output waveforms form all points of circuit for track simulation
2.3 多假目标欺骗的参数匹配
在实施多假目标欺骗干扰时,必须对敌方搜索警戒雷达的相关参数进行测量与分析,并依据受干扰雷达的工作参数,确定干扰机的欺骗干扰参数。下面以某型A雷达为例,其参数如表1所示,可以确定干扰机实施多假目标欺骗的参数及数据如表 2、3、4所示。
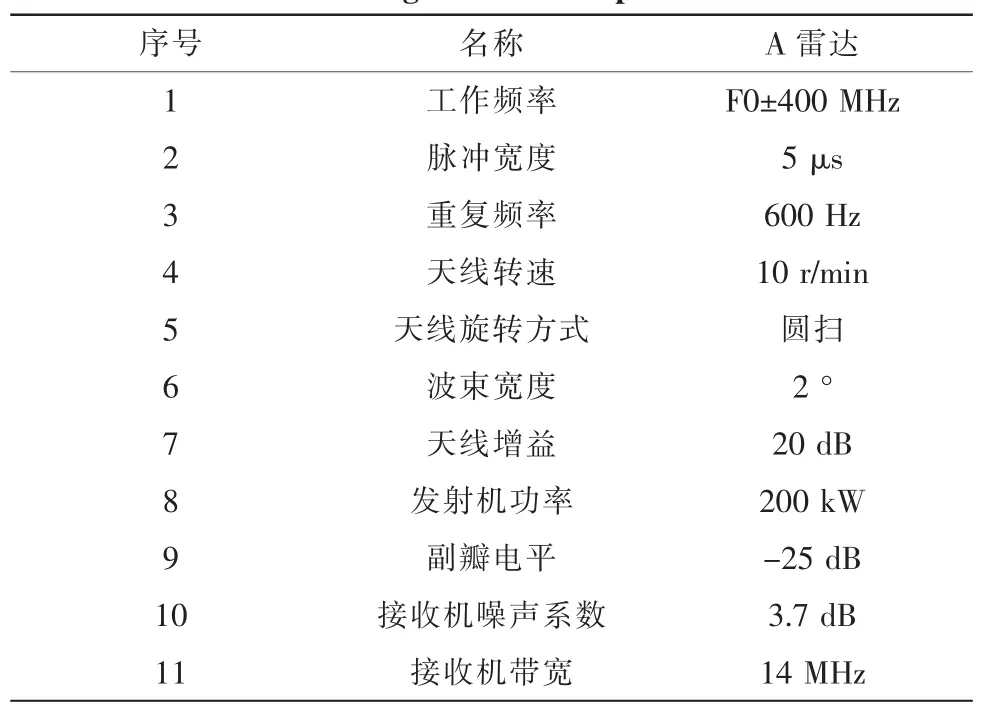
表1 A雷达参数设置Tab.1 Settings of A Radar parameters
由基本计算公式(6)、(7)。

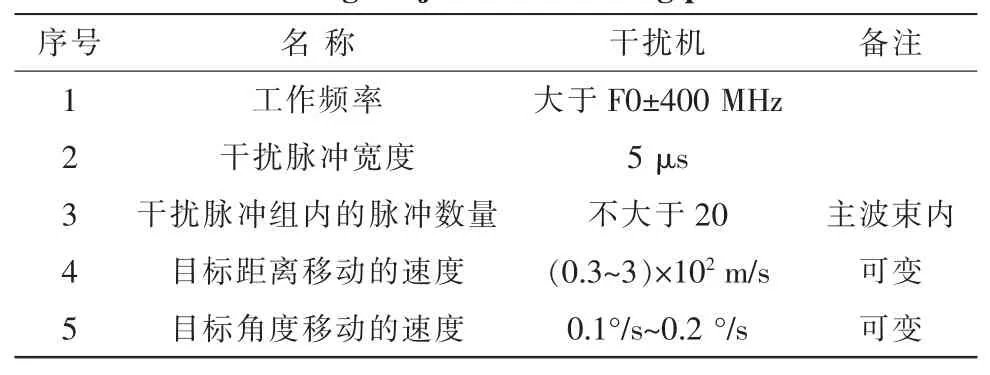
表2 干扰机匹配参数设置Tab.2 Settings of jammer matching parameters

可解得干扰机发射等效功率,式中PjGj为发射机等效功率;Pmin为雷达接收机灵敏度(-140 dBW);λ为工作波长(0.1 m);Ga(θ)为雷达天线副瓣增益(-25 dB)。 解算数据见表 3,该数据为10~250 km距离假目标所需的干扰机发射等效功率[5]。

表3 不同距离上干扰机发射等效功率Tab.3 Launch equivalent powers of jammer in different distances
2.4 多目标欺骗航迹的数据预算
干扰机在侦察分析出A雷达的工作参数后,依照多目标欺骗航迹模拟的原理,预先产生多批假目标欺骗航迹的数据,对A雷达实施多批假目标欺骗干扰,多批假目标航迹数据产生的原理相同,下面以两批假目标欺骗航迹数据为例进行说明。
确定A雷达的工作参数后,将干扰机的干扰参数初始化,其具体参数如下:
1) 天线旋转周期 6 s;Δθ=10°;T2=0.033 3 s;ΔTi=0.02 s;ΔRi=1 km;Δθi=1.2°;R=80 km 将它们代入公式(9):

算得一组想定数据,根据这些数据绘制成图2中的航迹a。
2) 天线旋转速度 6 s;Δθ=20°;T2=0.066 6 s;ΔTi=0.025 s;ΔRi=2 km;Δθi=1.5°;R=150 km 将其代入公式(9),算得一组想定数据,根据这些数据绘制成图3中的航迹b。
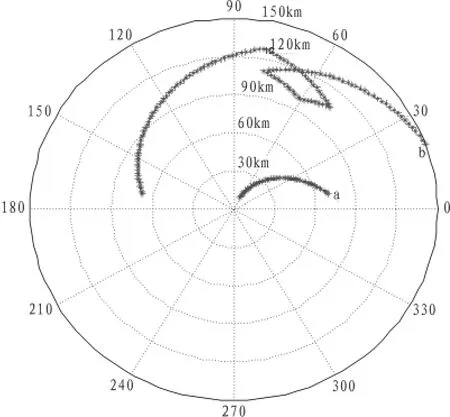
图3 两批假目标航迹图Fig.3 Two group of false tracks
3 半实物仿真系统的构建
3.1 系统的构成
本半实物仿真系统采用了计算机仿真技术、网络技术、微波技术和数学建模技术对雷达和雷达干扰机以及它们之间的对抗过程进行等效仿真模拟。其构成框图如图4所示,主要由雷达模拟分系统、雷达干扰模拟分系统两部分组成,雷达模拟和雷达干扰模拟两个分系统之间采用射频注入方式进行对接,而雷达模拟分系统和雷达干扰机的收发天线以及收发功率都是采用物理等效的方式进行动态天线方向图仿真模拟,这种实现方式不仅使雷达与雷达干扰机之间的对抗空间按等效原理缩小,而且严格保证了它们之间的时空一致性。

图4 半实物仿真系统构成框图Fig.4 Hardware-in-the-loop simulation system structure
3.2 系统的硬件设计特点
为了保证系统功能和性能的真实性,并且能够为雷达干扰及抗干扰技术研究提供有力的验证依据,系统在硬件设计方面尽量采用实际装备的硬件结构,只有目标、杂波环境模拟和收发天线模拟采用仿真的手段进行天线方向图模拟。系统的这种硬件设计特点确保了系统各个层次处理信息的真实性、完整性。
雷达模拟分系统可以模拟多种体制雷达,因此分系统在硬件设计方面比较有显著特点是数字波形产生模块和信号处理模块。数字波形产生模块采用了PC104+FPGA的模式,利用控制软件可对目标属性、目标环境和调制方式进行建模,以及设置的雷达工作参数,在FPGA中进行综合处理,以产生相应的雷达信号数据;信号处理模块采用了FPGA和DSP及SRAM结合的硬件处理结构,通过软件编程对其进行控制,可以使信号处理模块进行重构,构成不同的信号处理模式。两个模块都具有灵活多变,适合多种工作模式的特点[6]。
干扰模拟分系统在硬件设计方面主要采用了PC104+DRFM技术,基于DRFM的干扰设备能够对截获的雷达信号能进行高精度的保存并能进行逼真的复制,同样能将信号的相参信息保留和复制,通过适当的干扰调制就能产生与雷达信号相参的欺骗信号,从而可以对相参雷达形成有效的航迹欺骗干扰。
3.3 系统的软件设计特点
系统的软件设计与硬件紧密结合,甚至硬件软件化,弥补了硬件设计中的不足,使整个系统灵活可控,可重复,可重构,工作模式可固化,并且具有较强的实时监测和分析功能,能够直观地检测和分析各个层次信号的变化情况。系统软件的这种设计思想有利于雷达干扰技术的研究。数据库技术[7]的应用实现了系统参数组态化管理。采用数据库对雷达参数、目标环境参数、干扰航迹参数进行量化、层次化、简单化管理,有利于系统应用软件对组态化参数进行加载,可以快速构成复杂、多变的雷达干扰过程。
4 多假目标航迹欺骗在半实物仿真系统中的实现

图5 航迹产生原理示意图Fig.5 Principle of generating tracks
如图5所示,在雷达的作用距离范围内的任意方位,预先假定一条假目标运动的航线S(t),当雷达的主瓣在tAN时刻与航线S(t)相交时,干扰机发射干扰信号,从雷达副瓣进入雷达接收机,在相交点形成假目标航迹点。时间tAN的预测是航线欺骗干扰的关键。
根据航迹产生原理,图3中的两批假目标在半实物仿真系统中实现的效果如图6所示,与理论仿真航迹基本一致。

图6 雷达终端显示的假目标航迹Fig.6 False tracks display in Radar terminal
航迹产生原理:在进行航迹欺骗模拟时,需要由雷达干扰模拟分系统的接收单元完成对雷达模拟分系统的扫描周期等参数的测量,并在进行干扰模拟时,实时测量雷达天线主瓣的方向。一般情况下,雷达天线主瓣中包含较多的雷达信号脉冲,因此,实现雷达主瓣的信号照射到预想的目标上时,便可以产生假目标信号,此时干扰模拟分系统便根据当前天线指向干扰模拟分系统的天线副瓣方向,向雷达模拟分系统输出假目标信号,信号功率则根据所模拟目标信号的特点、距离、副瓣与主瓣的增益比等参数决定。在进行干扰信号模拟时,需要由控制单元实时对雷达模拟天线主瓣位置进行预测和估计以提前对DRFM进行控制,实现全主瓣宽度内的假目标模拟。
5 结束语
在满足雷达对抗干扰条件下,该半实物仿真系统不仅可以对多批假目标的任意航迹欺骗进行模拟,而且还可以对其他有源干扰样式进行模拟,构成逼真的雷达对抗动态过程,实现针对性地研究。因此,根据半实物仿真系统的优点,该系统对雷达对抗各种干扰技术和战术效果的研究具有一定的实用价值。
[1]孙龙祥,赵波,邱卫军,等.一种具有航迹特征的雷达假目标产生技术[J].雷达科学与技术,2005,8(4):198-201.
SUN Long-xiang,ZHAO Bo,QIU Wei-jun, et al.A technique for generating the radars false target with signature of flight path[J].Radar Science and Technology,2005,8(4):198-201.
[2]单家元,孟秀云.半实物仿真[M].北京:国防工业出版社,2008.
[3]闵庆义.有源假目标干扰及其抗干扰[J].航天电子对抗,1995(1):1-5.
MIN Qing-yi.Active false target and its anti-interference interference[J].Aerospace Electronic Warfare,1995(1):1-5.
[4]周续力.对搜索警戒雷达的多目标航迹欺骗[J].电子对抗信息技术,2007,11(6):43-45.
ZHOU Xu-li.Multiple-target track deception jamming against surveillance and warning radar[J].Electronic Information Warfare Technology,2007,11(6):43-45.
[5]赵国庆.雷达对抗原理[M].西安:西安电子科技大学出版社,1999.
[6]江建民,贺瑞龙.通用搜索雷达模拟器的设计[J].雷达科学与技术,2006,2(1):7-11.
JIANG Jian-min,HE Rui-long.Design of general-purpose surveillance radar simulator[J].Radar Science and Technology,2006,2(1):7-11.
[7]赵瑞国,马杰,何志勇,等.液体火箭发动机高速采集数据工程数据库设计及应用[J].火箭推进,2011(03):60-64.
ZHAO Rui-guo,MA Jie,HE Zhi-yong,et al.Design and application of high-speed acquisition database for liquid rocket engine[J].Journal of Rocket Propulsion,2011(03):60-64.
[8]石天卫.热工测控系统中接地对模拟信号的干扰[J].陕西电力,2008(07):53-56.
SHI Tian-wei.Interference of earthing upon analogue signal in thermal engineering measurement&control system[J].Shaanxi Electric Power,2008(07):53-56.
猜你喜欢
中学生数理化·中考版(2022年10期)2022-11-10
青年歌声(2019年12期)2019-12-17
航天电子对抗(2019年4期)2019-12-04
作文小学中年级(2018年10期)2018-10-29
电子制作(2018年1期)2018-04-04
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
军事运筹与系统工程(2016年4期)2016-07-10
现代兵器(2016年6期)2016-06-25
