一种基于自适应波束形成的主瓣保形算法研究
2012-07-13 06:29:38董建刚
电子设计工程 2012年16期
姬 妍, 张 峰, 董建刚
(1.榆林学院 能源工程学院,陕西 榆林 719000;2.榆林学院 信息工程学院,陕西 榆林 719000)
现代雷达往往面临着各种有意、无意的电磁干扰,基于雷达天线阵的自适应波束形成可以大大增强武器系统的电子对抗能力,是现代雷达的一项关键技术。对于大占空比干扰(连须干扰和回波)自适应波束形成是很有效的,因为其统计性能可以从具有相同或近似的多个有用的参考数据样本来估计,通过自适应波束形成可以在此类干扰方向形成有效的零陷[1]。而对于类似目标的脉冲欺骗式干扰和副瓣目标,其存在时间短,不能用多个样本来捕捉,因此很难通过自适应波束形成得到抑制,通常只能通过低的副瓣电平来减轻它们的影响[2]。而对于跟踪雷达而言,跟踪要求准确的测量目标的位置,通常使用的单脉冲技术通过比较两个或多个接收波束(如和差波束)来确定目标的波达方向。而要利用单脉冲技术准确地估计目标的波达方向需要稳定的主瓣形状。因此在雷达应用中,自适应波束形成产生的自适应方向图必须有低的副瓣电平,稳定的主瓣形状,在大占空比干扰的入射角处有很深的零点。
面对多种误差,如何实现自适应方向图的主瓣和副瓣控制,即自适应方向图问题[3]。到目前为止,针对有限次快拍下自适应波束形成的方向图的副瓣控制问题,不少学者曾做过研究,Richardson,D.T.Hughes等学者从上个世纪八九十年代就保证一定信干噪比下克服常规自适应波束形成方法存在的高副瓣和方向图抖动的问题进行了一系列的研究[4],前者通过对自适应权矢量的分析提出了基于子空间投影的快速自适应方向图形成方法,此类方法在不损失输出信干噪比SINR下使自适应方向图保持了静态方向图副瓣特性,后者于1995年提出了罚函数法自适应方向图副瓣控制,在损失一定输出信干噪比下对自适应方向图整体包括主瓣和副瓣进行了控制[5]。
上述问题的解决可归结为寻找一种简单的,与协方差矩阵中是否含目标信号无关的,保持静态方向图主瓣(适用于发射端的特殊主瓣发射和接收端的一般主瓣形状)和副瓣形状基本不变的自适应波束形成方法。文中提出的基于方向图局部保形思想的主瓣保形和基于已有的子空间投影的副瓣电平控制的联合使用为上述问题提供了一个可行的方案[6-7]。
1 固定主瓣形状和低副瓣自适应波束形成
1.1 已有的波束保形算法
已有的波束保形思想是在静态权矢量上加一个增量,即W=aq+ΔW,在满足抑制干扰的同时使增量尽可能小,其可用一个多目标优化问题表示:
对于(1)式实际上并不易操作,除了通用的通过设计权重将多目标问题转化单目标优化问题外,实际中经常用到两种简化变形:
其中,C为约束矩阵,f为约束值矢量。(2)式中通过约束实现对干扰的抑制,因此需要预知干扰方向导向矢量或者干扰子空间,而(4)中通对增量的模值约束实现最终方向图对静态方向图的保持,但对干扰零陷造成不易预测的影响,且的选取为一经验取值。
1.2 固定主瓣形状和低副瓣自适应波束形成
1.2.1 自适应中固定主瓣形状算法的实现
权矢量变化但保证主瓣形状不变,其充分条件是权矢量中决定主瓣形状的分量不变,根据主瓣范围估计主瓣子空间:(假定阵元数为M,Θm为主瓣角度范围)

上式(4)中对主瓣导向矢量的积分可以通过角度采样求和得到,设定 λ1≥λ2≥…λM,取(4)式中大特征值对应的特征矢量组成主瓣子空间,取大特征值的个数P可以根据功率分布确定:
则主瓣子空间及其正交子空间的一组基为列构成的矩阵和对应的空间投影矩阵分别为:

由此整个M维空间可分为主瓣子空间和其正交子空间,对应权矢量可以写为:

因此当W变化但其分量Wm=Wm0⊙Pmaq不变,那么对应方向图主瓣不变,相对于(1)式,主瓣保形的自适应方向图产生:对应解可表示为:

1.2.2 自适应中低副瓣算法的实现
正如在引言中所指出的如何在自适应中得到低副瓣是一个广泛研究的问题,其中研究的一个方面就是在静态方向图保证低副瓣的情况下如何设计自适应方法。众多文献已经分析了自适应方向图副瓣电平畸变的原因:有限次快拍引起的噪声特征值发散造成噪声特征矢量参与自适应权矢量的生成,因此消除自适应权矢量中噪声特征矢量分量(可以归结为投影法)就成为一种简单的使自适应保持原静态方向图低副瓣特性的方法,根据数据协方差矩阵是否含有目标信号,典型的投影算法有下面两种:

(11)中aq为静态权矢量,即约束矢量,该正交投影算法仅适用于数据中无目标信号的情况,为干扰较强时理想自适应权矢量的近似结果,此时信号子空间由干扰张成,投影后保证在干扰方向形成零陷,对于自适应方向图经过特殊设计的副瓣特性(如果有)并不造成必然破坏;(12)适用于数据中含有目标信号的情况,Wad0为常规自适应方法(如LCMV)得到的自适应权矢量,由Wad0=μRˆ-1aq易知静态权矢量处于信号子空间时,理想的自适应权矢量一定位于信号子空间,当静态权矢量是特殊设计来满足一定主瓣或副瓣包络形状时,(12)式简单的投影就会破坏这种性能。至于其中噪声或信号子空间可用不同方法得到。
将自适应权矢量看作静态权矢量加上一个自适应增量,如(13)式所示:

V的列为信号子空间一组基。从另一个角度理解,理想情况下自适应权矢量在静态权矢量上的变化量是信号子空间子一组线性组合,那么不受约束的投影算法可以更一般地写为:

(14)式不受静态权矢量的性能以及数据中是否含有目标信号的限制。
同时容易证明,对于(13)式的波束保形,所得的自适应权:

C为干扰导向矢量或其所张成的空间,那么(I-C(CHC)-1CH)就为噪声子空间,与(11)结果相同,也相当于旁瓣相消(静态权矢量通道作为主波束通道,以干扰方向的普通波束形成辅助通道波束)的结果。
1.2.3 固定主瓣形状和低副瓣自适应波束算法的实现
第1步:主瓣保形自适应,对应(13)式所示,这里需要确定主瓣保形区域,进而计算主瓣子空间。得到主瓣保形的自适应权矢量Wad0。
第2步:对应第一步产生的权矢量,消除随机噪声特征矢量的影响,对应(12)式操作得到最终自适应权矢量W′。
对于主瓣子空间可以考虑提前计算并保存(或保存其正交子空间),对于接收端进行波束扫描的情况,可虑是否能够寻找简单的迭代算法:从某一指向主瓣子空间开始,通过简单的处理得到下一角度指向上的主瓣子空间。此暂不作为本文研究内容。因此这里我们假定主瓣子空间或其正交子空间总是能及时得到的。
2 计算机仿真及分析
以22阵元半波长均匀直线阵为例,图1的3幅仿真结果均为此阵仿真的结果。下图均取存在目标信号,即主瓣方向内有目标的情况。
仿真1:与常规自适应波束形成比较
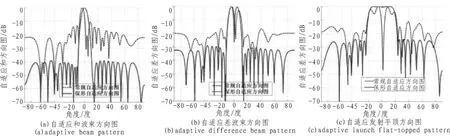
图1 与常规自适应波束形成比较Fig.1 Comparison with the conventional adaptive beam formation
为了对比结果,将常规自适应的结果再一次在图中画出。目标信号为 20 dB,方向 2°,-45°方向存在 40 dB干扰,快拍取 256。
可见与常规自适应方法相比,文中的方法不仅在主瓣和副瓣包络上保持了静态方向图的形状,其在干扰方向形成的零陷也要深于常规自适应方法,原因在于相对于常规自适应来讲其不需要在目标方向形成零陷。
仿真2:与已有自适应波束保形方法比较
相比于仿真 1,增多干扰数目,在-45°、-30°、40°方向增加40 dB干扰,在假定干扰方向已知下使用(3)式对应保形方法,进行对比,对应图2。

图2 与已有自适应波束保形方法比较Fig.2 Compared with the existing adaptive beam comformal
可见在干扰离主瓣较远时,文中方法与干扰方向已知下(13)式的保形方法性能相当,但当干扰离主瓣较近,或者存在干扰在主瓣内,文中的方法以保存主瓣形状优先于干扰抑制,而(3)对应的保形方法则抑制干扰优先于保存主瓣形状,这对先使用常规方法抑制副瓣干扰再使用其他方法消除主瓣干扰(如和差波束形成)的方法来讲,提供了一种副瓣干扰抑制下主瓣保形的方法。
仿真3:主瓣子空间估计中的选取对主瓣保形性能的影响
在前一仿真基础上增加一个10°方向40 dB的干扰,此处仅对平顶发射方向图进行仿真,图 3(a)、3(b)、3(c)分别是γ=0.999 9、γ=0.999 99 和 γ=0.999 999 的结果,可见 γ 选取越接近1,主瓣保持的越好,因为此时主瓣子空间拥有了更多的维数,而主瓣正交子空间中的矢量对主瓣形状影响更小,但在干扰方向形成的零陷深度会减小。
从另一方面讲的选取为主瓣保形和干扰抑制提供了一个折中的灵活选取方式。
3 结束语

图3 主瓣子空间中γ的选取对主瓣保形性能的影响Fig.3 Main lobe of the subspace is estimated that the selection of γ in the conformal properties of the main lobe
文中在总结和比较已有的各种自适应波束形成中方向图控制方法基础上,提出了主瓣保形和副瓣包络保形下自适应波束形成方法,解决了下面3个问题:静态权矢量采用特殊设计(不同于目标方向导向矢量)下基于含有目标信号的自适应波束形成方法中方向图主瓣变形,目标信号相消;自适应和差波束形成中低副瓣形成问题,因为自适应和差波束形成所能用到数据一定包含目标信号;任意静态发射方向图自适应零陷产生问题。从仿真结果看来,文中提出的方法能够在保持主瓣形状之上在干扰方向上形成零陷,并使副瓣包络变化尽可能小。
[1]Herbert G M,Malvern.Low sidelobe pattern synthesis and subspace projection, IEEE,2006.
[2]Herbert G M.A new projection based algorithm for low sidelobe pattern synthesis in adaptive arrays[C]//IEE Radar’97 conference proceeding, IEE pub,1997.
[3]WU Ren-biao,WANG Zhi-song,LU Dan,et al, Further results on peak sidelobe control in adaptive arrays[C]//International Conference on Radar,2006.
[4]YU Kai-Bor,Murrow D J, Adaptive digital beamforming for angle estimation in jamming, IEEE,2001.
[5]Sung-Hoon Moon,Dong-Seog Han,Hae-Sock Oh,et al,Monopulse angle estimation with constrained adaptive beamforming using simple mainlobe maintenance technique[C]//Military Communications Conference,2003.MILCOM103.2003 IEEE,2003:1365-1369.
[6]YU H J,LIU YQ,ZHANG M,et al.Research in search engine user behavior based on log analysis[J].Journal of Chinese Information Processing,2007,21(1):109-114.
[7]LIU Y Q,ZHANG M,RU L Y,et al.Automatic query type identification based on click through information[C]//Proc.of the 3rd Asia Information Retrieval Symp.AIRS 2006.LNCS 4182, Berlin, Heidelberg:Springer-Verlag,2006:593-600.
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18 07:31:04
北京航空航天大学学报(2021年9期)2021-11-02 08:24:24
北京航空航天大学学报(2021年6期)2021-07-20 07:24:00
通信技术(2019年3期)2019-05-31 03:19:08
电子测试(2018年6期)2018-05-09 07:31:54
电脑与电信(2018年11期)2018-02-16 05:41:36
声学与电子工程(2017年1期)2017-06-22 11:30:09
雷达与对抗(2015年3期)2015-12-09 02:38:58
四川师范大学学报(自然科学版)(2015年4期)2015-02-28 14:08:20
机电信息(2015年9期)2015-02-27 15:55:56