EKF、PF在目标跟踪中的研究
2012-07-13 03:07:50李国新何英杰许海涛
电子设计工程 2012年7期
李国新,何英杰,许海涛
(1.长安大学 信息工程学院,陕西 西安 710064;2.中国石油独山子石化分公司 新疆 克拉玛依 833600)
在目标跟踪中,可靠而精确的目标跟踪是目标跟踪系统设计的主要目的。而对目标跟踪技术的研究,在军事以及民用领域中都有着十分重要的意义。对于目标跟踪问题的解决,不同的学者提出过不同的解决方案。常规的卡尔曼滤波算法(KF)对线性高斯型的系统能得到最优估计,对非线性、非高斯系统的问题的解决主要有两类,一类是函数近似法;另一类是基于采样方法的近似法。
解决非线性滤波问题的最优方案,需要得到其目标状态后验概率密度函数的完整描述[1]。然而在实际问题中这很难。以往对非线性估计问题的处理,主要是通过扩展卡尔曼(EKF)来解决。但是扩展卡尔曼滤波对非线性的状态方程或观测方程作线性化处理在稳定性、收敛精度、收敛时间上往往难以满足要求。由于近似非线性函数的概率密度分布比近似非线性函数更容易,使用采样方法近似非线性分布来解决非线性问题的途径在最近得到了人们的广泛关注。采样近似法是用带有权值的样本集来近似目标的状态后验概率密度,典型的算法粒子滤波(PF)算法。PF摆脱了解决非线性滤波问题时随机量必须满足高斯分布的制约条件,适用于非高斯非线性条件[2]。
1 非线性滤波方法
1.1 状态空间描述
为定义非线性滤波问题,首先引入状态空间模型:

其中,fk为状态方程,wk-1是过程噪声。hk为观测方程,vk是观测噪声,k为自然数。
1.2 扩展卡尔曼滤波算法
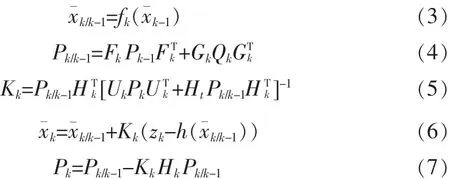
EKF算法是一种近似方法,它将非线性模型在状态估计值附近作泰勒级数展开,并在一阶截断,用得到的一阶近似项作为原状态方程和测量方程近似表达形式,从而实现线性化,同时假定线性化后的状态依然服从高斯分布,然后对线性化后的系统采用标准卡尔曼滤波获得状态估计[3]。通过近似线性化,得到对应的扩展卡尔曼滤波法为:

EKF因为简单易于实现在近三十年得到了广泛应用,但是它具有如下的局限性:1)在线性化过程中引入了模型误差,往往使得状态的估计值产生较大的偏差,不能满足精度的要求,甚至可能导致滤波发散;2)EKF在滤波前必须计算非线性模型的雅可比矩阵,对于高维的复杂模型,过程繁琐且容易出错[4]。
1.3 粒子滤波算法
粒子滤波是一种基于随机采样的滤波方法,主要解决非线性非高斯问题。粒子滤波实质是递推Bayes滤波的一种实现形式,在每一时刻,利用状态空间中一系列随机样本集(粒子)来近似系统状态的后验概率密度函数(PDF),从而得到下一时刻的状态估计。其主要思想是利用这些采样点和权值来获得最小方差的状态估计量,是一种基于仿真的统计滤波方法[5]。
粒子滤波算法的基本步骤如下[6]:
1)初始化:当k=0时,确认目标状态的先验概率密度函数p(x0)的表示形式,从中提取个样本点,并给每个粒子赋初始权重为
2)状态预测,即重要性采样、权重计算:当时刻k=1时,从转移先验密度函数p中提取N个样本点,通过公计算权重(公式中的为似然密度函数);如果Neff=
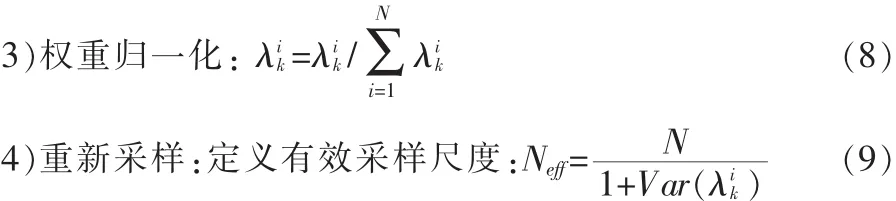
<Nth,则对重新采样,重新构造状态集合,使其近似于分布并重新设定粒子的权值为1/N;否则,不需要进行重采样;

随机样本粒子在粒子滤波器中没有明确的格式,也不受模型线性和高斯假设的约束。粒子滤波器采用这些随机样本就可以近似得到任意函数的数学期望,从而得到基于物理模型的近似最优数值解[7]。因此,粒子滤波器是一种适用于强非线性、无高斯约束的基于模拟的统计滤波器,具有精度高、收敛速度快等特点。
2 仿真分析
为了比较两个滤波算法的跟踪性能,这里引用一个经典的非线性例子进行仿真。模型如下:

实验参数设定:wk和vk为均值为零的高斯白噪声,协方差分别为1.0和1.0。
状态方程和观测方程都是非线性的形式。假设初始状态x0=0.1,时间阶数为50,粒子数为100,并且初始状态的协方差为5。
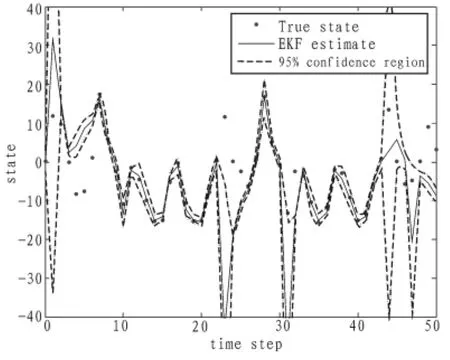
图1 EKF状态估计Fig.1 EKF state estimation

图2 PF状态估计Fig.2 PF state estimation
通过图1可以看出,EKF跟踪真实的情况偏离很远;图2反应PF不仅能够很快逼近真实结果,收敛速度也很快,而且与真实状态的差距要比EKF算法小得多。
3 结 论
本文通过仿真对两个滤波算法进行了性能分析,并给出了各算法的复杂度。通过比较,从滤波精度上看,EKF线性化过程中引入了模型误差,往往使得状态的估计值产生较大的偏差,不能满足精度的要求,甚至可能导致滤波发散,同时需要计算非线性函数的雅可比矩阵,过程繁琐且容易出错;PF不要求模型是线性的,对任意分布的噪声都适用,并且算法简单,易于编程实现,滤波效果好,适用范围更广。从计算速度上看,EKF具有明显的优势,因此对于工程应用上,在精度要求不太高场合,可以优先考虑采用EKF。从应用环境来看,在非线性非高斯场合选取粒子滤波算法更好一些。
[1]Kalman R E.A new approach to linear filtering and prediction problems[J].Trans ASME,Journal of Basic Engineering,1960,82(1):35-45.
[2]杨小军,潘泉,王睿,等.粒子滤波进展与展望[J].控制理论与应用,2006,23(2):261-266.
YANG Xiao-jun,PAN Quan,WANG Rui,et al.Development and prospect of paiticle filtering[J].Control Theory&Applications, 2006,23(2):261-266.
[3]Gordon N J,Salmond D J,Smith A F M.A novel approach to nonlinear/non-gaussianbayesianstate estimation[J].IEE Proceedings on Radar and Signal Processing,1993,140(2):1072113.
[4]胡士强,敬忠良.粒子滤波算法综述 [J].控制与决策,2005,20 (4):361-365.
HU Shi-qiang,JING Zhong-liang.Overview of particle filter algorithm[J].Control and Decision,2005,20(4):361-365.
[5]朱志宇.粒子滤波算法及其应用[M].北京:科学出版社,2010.
[6]王志刚,芮国胜,胡昊.UPF算法及其在目标跟踪中的应用[J].雷达科学与技术,2005(2):21-23.
WANG Zhi-gang,RUI Guo-sheng,HU Hao.Unscented particle filter algorithm and its application to target tracking[J].Radar Science and Technology,2005(2):21-23.
[7]Doucet A,de Freitas J,Gordon N.Sequential Monte Carlo Methods in Practice[M].New York:Springer,2001.
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
中等数学(2020年2期)2020-08-24 07:58:46
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
测控技术(2018年9期)2018-11-25 07:44:24
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
北京航空航天大学学报(2016年7期)2016-11-16 01:50:55
光学精密工程(2016年3期)2016-11-07 09:03:32
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2015年1期)2015-08-22 11:16:28
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:36