
PID参数继电反馈整定法的改进
2012-07-13 06:29:26高峰
电子设计工程 2012年15期
高峰
(商丘师范学院 物理与电气信息学院,河南 商丘 476000)
文中首先分析了PID参数继电整定法的基本原理和操作过程,给出了Astrom法的自整定公式和PM法的自整定公式。然后又在此基础上提出了一种改进的继电整定方法,并推导了相应的整定公式。最后,通过实际仿真对比,证明了利用改进的方法进行PID参数整定可以获得更好的控制性能。
1 继电反馈整定法的基本原理
PID参数的继电整定方法是由瑞典著名学者Astrom和Hagglund两人共同提出的[1-3],其原理框图如图1所示。其中继电器环节采用带滞环的继电器,它有滞环宽度ε和滞环幅d值2个参数,开关K用于选择继电测试或者PID控制器调节。
具体的参数整定步骤如下:
1)通过人工调节使系统进入稳态。
2)按下整定按钮,使开关K与点M接通;选取合适的ε和d使系统获得等幅振荡的周期运动。
3)根据产生的等幅振荡计算对象的临界振荡εC频率及临界振荡增益KC。
4)通过整定公式计算PID控制器的参数。
5)自动调整PID参数。
党的十八届三中全会进一步明确提出,公有制经济和非公有制经济都是社会主义市场经济的重要组成部分,都是我国经济社会发展的重要基础。
6)开关K接通N点,实行PID控制。
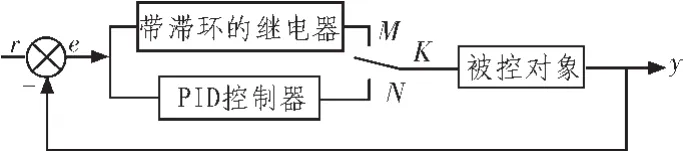
图1 继电反馈整定法的原理图Fig.1 Principal diagram of relay feedback tuming method
在获取临界信息后,通常采用Astrom法和PM法的整定公式获得PID参数。
Astrom法的整定公式如下:
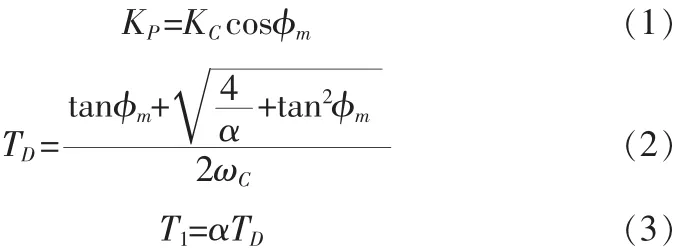
PM法的整定公式如下:
其中α通常取4。利用上面两种方法整定得到的参数一般比较粗糙,控制效果较差。
2 继电反馈整定法的改进
为了得到更加优化的PID参数,可以对前述的继电实验加以改进,在继电环节和被控对象之间设置一个积分器。在这种情况下进行实验,被控对象在高频只需至少-的相位滞后,就可以得到等幅振荡的周期运动。其频率就是虚轴的负半轴与幅相频率特性曲线的交点的频率。此外,积分器的设置能够促进高频信号的衰减,使谐波中的高频成分大大减少,基波成分所占比例得到提高,从而改善了描述函数的精度[4-6]。含积分器的继电整定原理如图2所示。
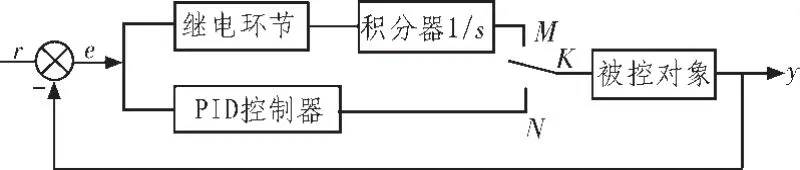
图2 改进的继电整定法原理图Fig.2 Principal diagram of improved relay feedback tuming method
设开环幅相频率特性曲线与虚轴的负半轴相交于点B,该点的频率即为临界振荡频率ωb。

T可以通过实验测得。同样可得到被控对象在这个频率点的幅值近似为

A即为被控对象的输出y的振荡幅值,亦是通过实验测得。并且由式(9)可知,通过选择合适的继电环节的幅值d能够对A进行限制,以保证系统正常工作。确定ωb和Kb之后,便可以进行PID参数整定。PID控制器作用下的被控对象幅相频率特性曲线如图3所示。

图3 PID控制器作用下的幅相频率特性曲线Fig.3 Magnitude-phase characteristics curve under PID control
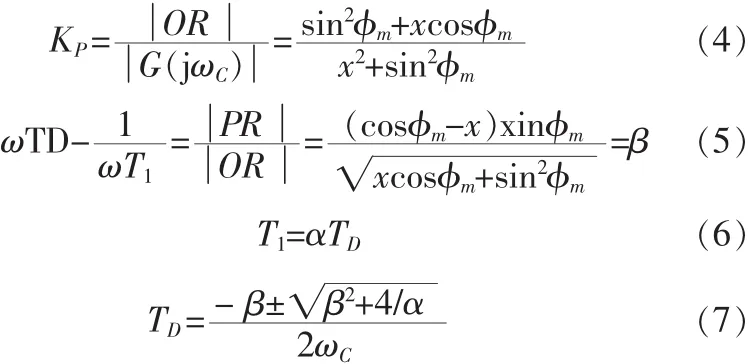
通过选择不同的KP,TI,TD值能够使幅相频率特性曲线上的点随意地移动。图3中,选择不同的KP值,会使点C沿径向移动,而选择不同的TI和TD值能够使点C沿幅相频率特性曲线的切向移动。点C能够发生移动的角度区间为(-90°,90°)。现欲将点 C移至同时满足相位裕度φm和幅值裕度Am的点上,可以得到

根据经验,令TI和TD满足

α通常取4,最后解得

式(14),(15)和(16)即为改进后的 PID 参数整定公式。
3 仿真实验
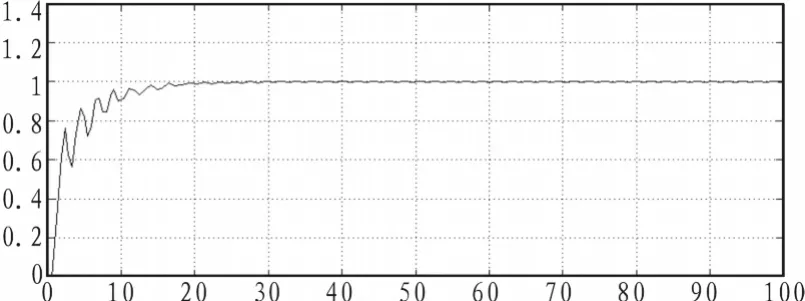
图4 基于Astrom法的系统单位阶跃响应曲线Fig.4 Unit step response curve of the system based on Astrom method
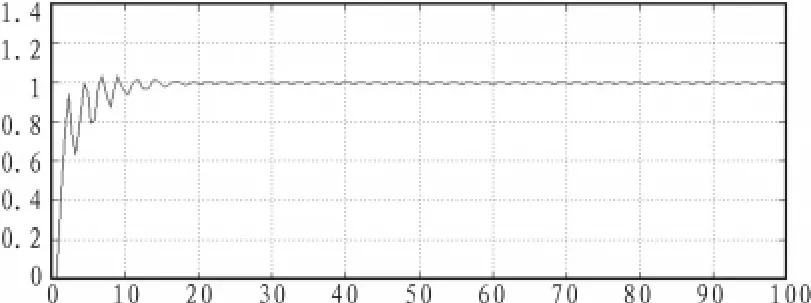
图5 基于PM法的系统单位阶跃响应曲线Fig.5 Unit step response curve of the system based on PM method
4 结束语
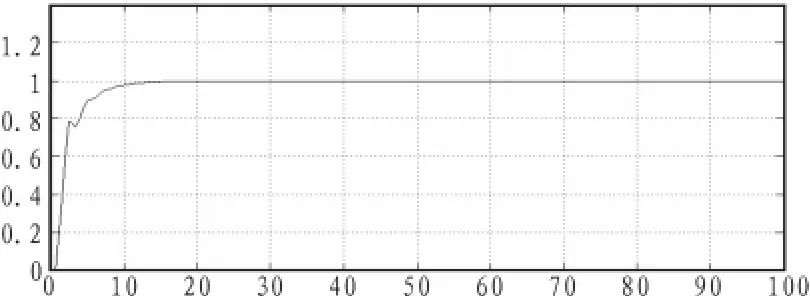
图6 基于改进方法的系统单位阶跃响应曲线Fig.6 Unit step response curve of the system based on improved method
由对象的仿真可以看出,基于Astrom法整定出的参数的系统单位阶跃响应曲线在20 s开始稳定;而基于PM法整定出的参数的系统单位阶跃响应曲线也在20 s开始稳定;基于改进方法整定出的参数的系统单位阶跃响应曲线在15 s开始稳定。而且前两者的曲线比后者的震荡要明显的多。所以得出结论:由改进后的方法得到的PID参数实行控制,系统性能明显优于Astrom法和PM法。
[1]Astrom K J,Hagglund T.Automatic tuning of PID controller[J].Research Triangle Park, Instrument Society of American,1988,5:123-128.
[2]Astrom K J ,Hagglund T.PID controls:theory,design and tuning[J].Research Triangle Park,Instrument Society of American,1995,34(7):46-52.
[3]Ziegler J G,Nichols N B.Optimum settings for automatic controllers[J].IEEE Trans on ASME,1942,65:759-768.
[4]Vandecursen J M,PePerstrate J A.Internal model control with improved disturbance rejection[J].Int,J control,1995,62(4):983-999.
[5]Tan K K,Lee T H,Wang Q G.An enhanced automatic tuning procedure for PI/PID controllers for process control[J].AICHE Journal,1996,42(9):2555-2562.
[6]Wendell S R.Takecontrol of PID tuning[J].Plant Engineering,2005,59(9):57-60.
猜你喜欢
舰船电子对抗(2022年5期)2022-11-25 03:34:24
科学技术创新(2021年11期)2021-05-25 10:04:18
机电工程技术(2018年10期)2018-12-06 02:26:38
电子技术与软件工程(2018年4期)2018-03-23 11:59:34
电测与仪表(2017年20期)2017-12-19 05:14:24
西部广播电视(2015年17期)2016-01-18 03:46:22
贺州学院学报(2015年1期)2015-02-28 17:56:46
雷达学报(2014年4期)2014-04-23 07:43:06
电力自动化设备(2013年11期)2013-09-18 02:55:18
