直升机近地空战数据链组织运用分析*
2012-07-11 08:47:44夏白桦贺品瑜史迎春崔亚磊
舰船电子工程 2012年9期
夏白桦 贺品瑜, 史迎春 田 波 崔亚磊
(1.国防信息学院二系 武汉 430010)(2.71687部队 新乡 453000)
1 引言
近地空战是攻击直升机的一种重要作战行动。它是指直升机与直升机之间,在距离地面30m~300m区域的作战[1]。由于在这一区域内,直升机能借助复杂地形地物隐蔽埋伏或隐蔽飞行,作战双方目视发现对方的最大范围是300m~3000m,借助光学仪器的发现距离为1000m~6000m,所以,直升机近地空战的发生往往具有很大的突然性,一旦遭遇,需要快速组织控制好攻击队形,率先开火,从而占得优势。
数据链作为链接传感器平台、指控平台和武器平台的指挥信息系统,在现代战争中发挥着巨大作用。它不仅能为各参战平台提供统一的战场态势信息,也提升了平台间的指挥控制能力和战术协同能力。理论和实践研究表明,在数据链的支持下,飞机的空战能力提升50%以上[2~3]。所以,攻击直升机装备数据链系统后,可通过数据链获得实时的战场态势信息,做到先敌发现,预有准备,先敌进攻。然而,由于地形地物的影响,目标不易探测,信息传递也不够通畅,影响了数据链能力的发挥,降低了直升机的作战效能。本文将依据直升机近地空战的特点,从目标监视信息获取及分发方法、直升机编队指挥控制方式和数据链网络构建等方面,研究数据链的组织运用问题,以提高直升机近地空战的作战能力。
2 近地空战中数据链网络组织运用
2.1 目标监视信息获取方法
参与近地空战的直升机编队通常由攻击直升机和侦察直升机等构成[4]。编队中各成员对目标监视信息的获取有两种途径。一是从预警机、地面雷达网或其它有报告职责的平台获得;再就是编队成员间互相传递各自发现的目标监视信息,尤其是侦察直升机侦察到的目标监视信息。
预警机等平台可进行超视距、大范围的侦察,获取作战地域内,甚至是作战地域外的地、空、海情,通过数据链向网内成员分发。但对于敌直升机编队,由于可利用地形地物的遮蔽作用,许多情况下可能无法被侦察到。这时,侦察直升机的优势即可显现。它不仅可以在近距离侦察并跟踪低空目标,还可以深入复杂地形处,搜索那些企图利用地形地物隐蔽躲藏的目标。
所以,获取目标监视信息的两种途径各有优势。敌直升机编队在沿进攻线路飞行过程中,纵使能利用地形地物隐蔽,但只要在某一处无法隐蔽时,就可能被预警机等平台发现并通过数据链发送给各参战平台(包括直升机地面指挥所)。在接到敌机来犯的消息后,直升机编队地面指挥所根据需要派出直升机编队迎敌,并向编队转发来自预警机等平台的目标监视信息。编队在迎敌过程中,侦察机前行,在尽可能隐蔽飞行的情况下搜索敌机,并报告所发现的目标监视信息。攻击直升机则低空隐蔽飞行,同时不断接收来自数据链上的态势信息,掌握敌机之航迹。进入作战地域后,则隐蔽等待,或根据敌机的方位变化,适时调整位置作好攻击准备。
由于直升机编队是超低空飞行,地面指挥所向编队发送的信息可能难以正常接收,这时可派出直升机空中指挥所,由空中指挥所取代地面指挥所指挥控制编队、转发预警机等平台的目标监视信息。
2.2 指挥控制方式
数据链改变了传统的指挥控制方式,实现了指挥所对空中作战编队的自动化指挥[5]。通过数据链,直升机地面(或空中)指挥所可对各直升机的火控系统、飞控系统等进行自动控制,包括控制飞行路线、目标瞄准、攻击时机等。指挥所针对敌机的分布情况,指示各攻击直升机沿最佳路线进入隐蔽地点,并发送任务分配信息。各攻击直升机的导弹瞄准系统根据所分配的目标,自动瞄准,并随直升机与目标间的相对位置变化而实时调整瞄准方向,牢牢锁定目标。同时,指挥所还将根据目标与攻击直升机的相对位置和导弹的攻击距离等,自动计算发起攻击的时机,控制导弹发射前的预热。一旦可以实施攻击,指挥所下达命令,所有攻击直升机突然上升至攻击高度后发射导弹,向各自的目标实施突然打击。
为了保证作战的突然性,攻击直升机在发起攻击前应处于无线电静默状态。在这期间,由于只接收信息而不报告自身的位置信息,使得态势信息不完整。而且,各作战平台不了解攻击直升机的情况,容易造成误伤。为解决这一问题,这里提出由指挥所报告攻击直升机的位置或航迹。
指挥所对所要攻击目标的分布、状态和航迹都有较全面的了解,作战目的和目标清晰。它可以在结合地形地物的基础上,规划出攻击直升机的飞行路线。在攻击直升机迎敌过程中,指挥所控制其飞行路线,即指挥所周期性地向攻击直升机发出指令,命令它们在各时间点上应到达的位置。攻击直升机上安装有导航仪,通过GPS卫星导航系统提供的无源导航信号,可实时地获知当前所处的位置。只要攻击直升机能按指挥所的要求飞行,它们在无线电静默期间的位置便是明确的。所以,对于攻击直升机而言,指挥所的飞行指令是它们要完成的飞行任务,而对于网内其它接收到这些指令的成员,则可认为是攻击直升机的位置或航迹信息。通过这种方式,既实现了攻击直升机位置信息或航迹的发布,同时,又保证了它们的无线电静默状态。
这里的关键问题是直升机航迹控制的精确性。实际上,攻击直升机在每一个时刻的实际位置与指挥所的要求会有一定的误差。位置误差大小起决于对直升机飞行速度的控制、路径不确定因素的估计、意外事件的发生、发送指令周期的长短等。攻击直升机周期性地收到飞行指令,不断检测偏差并进行调整,可有效地将位置误差控制在一定的范围。真实的飞行线路可理解为一条“路径带”,攻击直升机在路径“路径带”里飞行。
网内成员识别的直接方法是相互通信,或者是被识别者报告精确的位置信息和识别码。采用指挥所报告攻击直升机位置或航迹的方式后,既不通信、不发送位置信息和识别码,指挥所报告的位置信息又有一定的误差,只能采用间接识别方法。即:首先明确路径带,判断某个平台是否在路径带内;其次是分析其航迹,确认该平台是否与指挥所报告的航迹具有相关性。两个判断相互印证,即可判断为友军。
2.3 数据链网络的组织
根据态势信息获取及分发方法和指挥控制方式的分析,直升机近地空战可组建如图1所示的数据链网络。图中有两个网络:网络A是由直升机编队地面指挥所及陆、海、空各级指挥所(也可包括部分武器平台)参与组成,网络B是由地面指挥所和编队中所有成员参与组成。通过网络A,地面指挥所接收陆、海、空情,报告自己掌握的态势信息,接受上级指挥所的指挥控制,与其它平台交换战术协同信息等。在网络B中,地面指挥所向各成员转发来自网络A的消息、指挥控制各成员。同时,各成员间还将交换态势信息及战术协同信息等。网络A和网络B各自独立,互不影响。地面指挥所作为转接单元,在两个网络间转发信息。
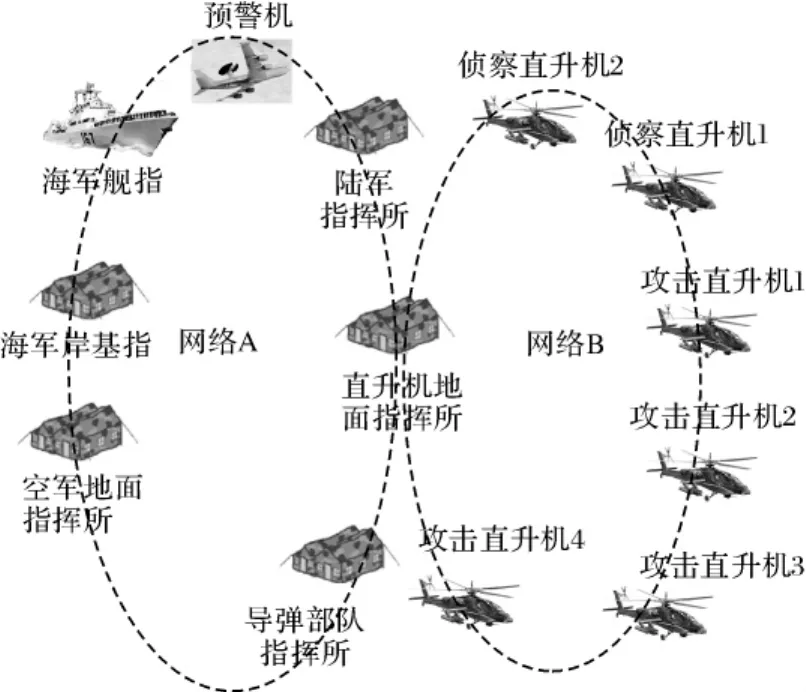
图1 未开通空中指挥所时的数据链网络
从直升机编队起飞迎敌至战斗结束,网络B可运行于多种模式。在编队起飞到进入作战地域隐蔽阶段,攻击直升机处于无线电静默状态,仅接收来自指挥所的指令、态势信息等,除非紧急情况,否则不发送任何信息。攻击开始后,网络工作于正常模式,即按常规收发信息。
当派出空中指挥所后,为了确保地面指挥所对空中指挥所的指挥控制,需要在这两个指挥所间组建专用的数据链网络,如图2中的网络C。通过网络C,直升机地面指挥所对空中指挥所实施指挥控制,交换其它的重要信息。另外空中指挥所同地面指挥所一样,也将加入网络A和网络B。一方面在网络A与网络B之间转发信息,另一方面接替地面指挥所对编队实施指挥控制。
2.4 数据链网络实时性分析
数据链网络是否满足作战需求,消息更新率和系统响应时间是实时性验证的重要指标。对于采用轮询协议的数据链网络,可通过计算轮询周期确定消息更新率和系统响应时间[8]。轮询周期的大小取决于网络中成员数量、各成员发送消息的量,以及维持网络正常运行所需的固定开销等[6]。
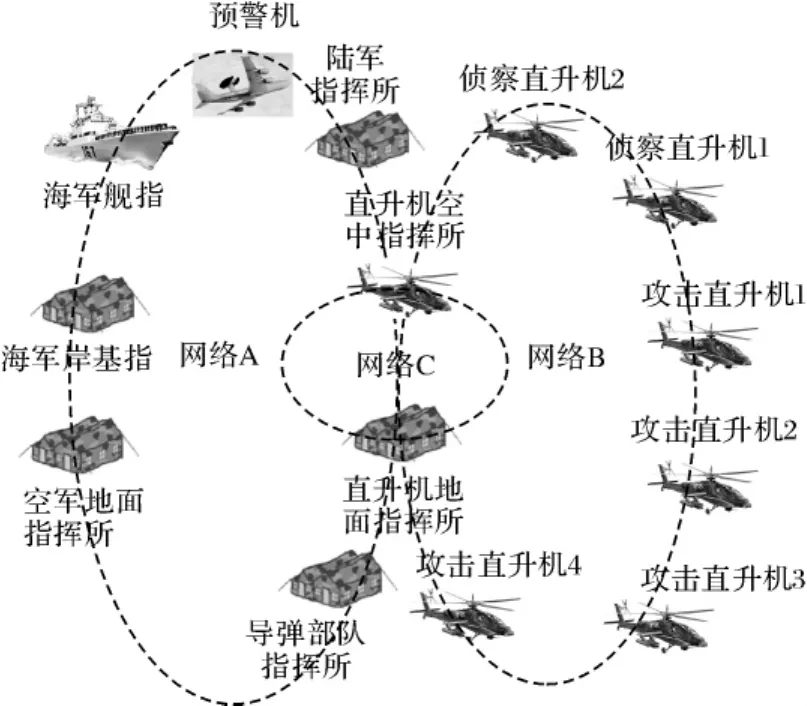
图2 开通空中指挥所后的数据链网络
假设共有M+1个网络成员,主站编号为i=0,从站依次为i=1,2…M。轮询时按编号依次进行。设主站在t=0时刻发起第一次呼叫,首先呼叫1号从站,固定开销为10帧,从站应答固定开销为13帧(以link11为例[7,9]),则有:
主站呼叫从站1占用时隙为

式(1)中Rb为帧速率,一般为75[8](单位:帧/秒),1T11左上角的“1”表示第一次呼叫,右下角的第一个“1”表示第一个从站成员,第二个“1”表示呼叫,如果为“2”则表示为应答。从站1应答占用时隙为

其中λ1为各站消息产生率(单位:帧/秒。主站为λ0,从站依次为λ1,λ2…λM),λ11T11为从站1在1T11时间内产生的消息。结合式(1)和(2)可得从站1在第一个轮询周期中占用时隙为

依此类推,从站m(1<m≤M)在第一个轮询周期中占用时隙为


结合式(3)、(4)、(5)可得,第1个轮询周期为

同理可得,在第n(n>1)个轮询周期时:
从站1占用时隙为

从站m占用时隙为
主站占用时隙为

结合式(7)、(8)、(9)可得,第n个轮询周期为

根据以上计算公式,运用迭代计算方法和Matlab进行仿真[10],可得出网络的轮询周期与消息产生率和轮询周期数间的关系如图3所示。
为简单起见,图3中假定成员总数为8个,各成员的消息产生率都相等,并取消息产生率为3帧/秒、6帧/秒和8帧/秒时,分别计算得到轮询周期为3.26s、6.15s和15.09s。消息产生率增加,轮询周期也增大,且增加速度加快。
图3 轮询周期与消息产生率和轮询周期数间的关系
图4 轮询周期与网络成员数量间的关系
消息产生率一定时,成员数量增加,轮询周期也增大,如图4所示。假定所有成员的消息更新率一定,为7帧/秒,随着网内成员的增加,轮询周期增加的速度越来越快。当成员数达到10个后,计算结果不收敛。
网络设计完成后,能否满足实时性要求,需要进行分析验证。图4中,如果要求消息更新率为5帧/秒,则网络容纳的成员为5~6个。实际上,指挥所、侦察直升机和攻击直升机的消息产生率是不同的。精确计算时,可按各自估计的大小取值。
3 结语
针对直升机近地空战的特点,对数据链在近地空战中的组织运用问题进行了分析研究。探讨了直升机编队获取态势信息的两种途径,使直升机编队能更全面准确即时地掌握战场态势信息;讨论了近地空战的指挥控制方式,提出了采用指挥所控制攻击直升机飞行路线的方法,使得攻击直升机在保持无线电静默的情况下,仍能实现航迹信息的发布,达成了作战的突然性;分析了作战的实际需要,构建了数据链网络,并通过建立的简单数学模型,计算了轮询网络的实时性与网络成员数和成员消息产生率间的关系,为检验网络是否满足作战需求提供了理论分析手段。
[1]程启东,李爱英.武装直升机及其机载空空导弹[J].航空兵器,1995(2):31-34.
[2]夏白桦,周于义.数据链对现代空-空作战效能的影响分析[J].计算机工程,2011,37(9):257-259.
[3]孙义明,杨丽萍.信息化战争中的战术数据链[M].北京:邮电大学出版社,2005.
[4]王立强,李炯.数据链在陆航典型作战样式中的应用[J].电讯技术,2004,6(19).
[5]夏白桦,李洪业.基于作战需求的数据链网络消息更新率分析[J].舰船电子工程,2009,29(10):66-69.
[6]李有才,黄强,刘维平.轮询数据链系统的信息传输与交换周期探讨[J].电子对抗,2011(4):41-42.
[7]董超,田畅.战术数据链性能评估方法研究[J].军事运筹与系统工程,2007(9):65.
[8]骆光明,杨斌,邱致和,等.数据链[M].北京:国防工业出版社,2008.
[9]贾国辉.数据链装备原理与运用[M].武汉:通信指挥学院,2010.
[10]邵玉斌.Matlab/Simulink通信系统建模与仿真实例分析[M].北京:清华大学出版社,2008.
猜你喜欢
小哥白尼(军事科学)(2021年5期)2021-08-30 06:46:12
军民两用技术与产品(2021年10期)2021-03-16 06:05:10
中国交通信息化(2020年7期)2021-01-14 03:18:14
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
计算机与数字工程(2019年2期)2019-02-28 07:35:56
环球时报(2019-01-10)2019-01-10 06:25:43
北京航空航天大学学报(2017年3期)2017-11-23 05:14:54
红土地(2017年1期)2017-06-05 09:37:29
自动化学报(2016年8期)2016-04-16 03:38:56
火控雷达技术(2016年1期)2016-02-06 02:18:06